TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025077077
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023189001
出願日
2023-11-06
発明の名称
建設機械のカメラ調整システム、建設機械、建設機械のカメラ調整方法及びプログラム
出願人
日本車輌製造株式会社
代理人
弁理士法人IPX
主分類
G06T
7/70 20170101AFI20250512BHJP(計算;計数)
要約
【課題】複数のカメラのキャリブレーションを高い精度で実行できる建設機械のカメラ調整システムを提供する。
【解決手段】本発明の一態様によれば、建設機械のカメラ調整システムが提供される。このカメラ調整システムは、プロセッサを備える。プロセッサは、傾斜情報取得ステップと、補正値算出ステップと、カメラ補正ステップと、を実行するように構成される。傾斜情報取得ステップでは、建設機械が備える傾斜センサから傾斜情報を取得する。補正値算出ステップでは、傾斜情報に基づいて建設機械の傾斜に対する補正値を算出する。カメラ補正ステップでは、第1カメラから取得した第1補正用画像と第2カメラから取得した第2補正用画像とのオーバーラップ量が一定値以上になるように、補正値を参照しつつ第1カメラ又は第2カメラの向きを補正する。第1カメラ及び第2カメラは、建設機械の本体に設置されると共に、互いの撮影範囲が重複している。
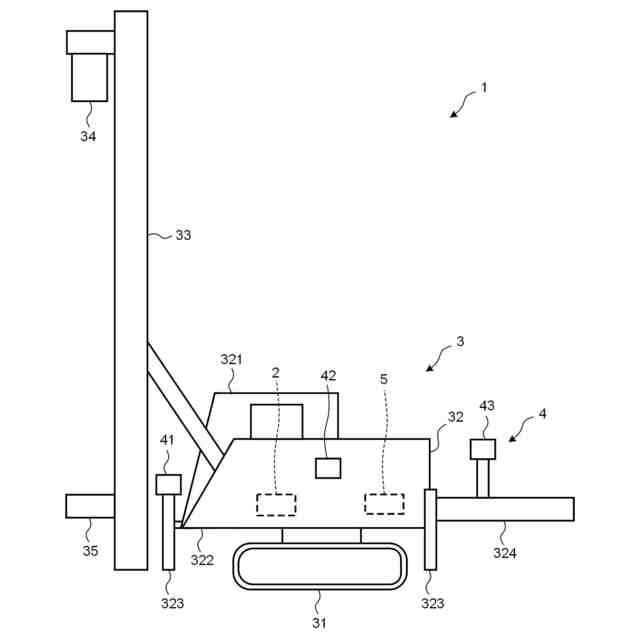
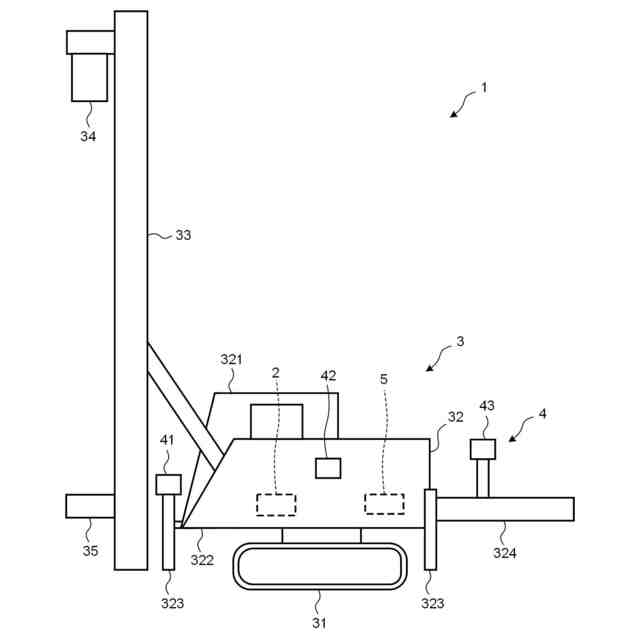
【選択図】図1
特許請求の範囲
【請求項1】
建設機械のカメラ調整システムであって、
プロセッサを備え、
前記プロセッサは、傾斜情報取得ステップと、補正値算出ステップと、カメラ補正ステップと、を実行するように構成され、
前記傾斜情報取得ステップでは、建設機械が備える傾斜センサから傾斜情報を取得し、
前記補正値算出ステップでは、前記傾斜情報に基づいて前記建設機械の傾斜に対する補正値を算出し、
前記カメラ補正ステップでは、第1カメラから取得した第1補正用画像と第2カメラから取得した第2補正用画像とのオーバーラップ量が一定値以上になるように、前記補正値を参照しつつ前記第1カメラ又は前記第2カメラの向きを補正し、ここで、前記第1カメラ及び前記第2カメラは、前記建設機械の本体に設置されると共に、互いの撮影範囲が重複している、建設機械のカメラ調整システム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の建設機械のカメラ調整システムにおいて、
前記カメラ補正ステップでは、さらに、前記第2補正用画像と第3カメラから取得した第3補正用画像とのオーバーラップ量が一定値以上になるように、前記補正値を参照しつつ前記第3カメラの向きを補正し、ここで、前記第3カメラは、前記建設機械に設置されると共に、前記第2カメラと撮影範囲が重複している、建設機械のカメラ調整システム。
【請求項3】
請求項2に記載の建設機械のカメラ調整システムにおいて、
前記カメラ補正ステップで取得される前記第1補正用画像及び前記第2補正用画像には、共通のマーカが含まれ、
前記カメラ補正ステップでは、前記第2カメラの向きの補正後、かつ、前記第3補正用画像の取得前に、前記建設機械のうち前記第1カメラ、前記第2カメラ及び前記第3カメラが設置された旋回体を、取得される前記第2補正用画像及び前記第3補正用画像に前記マーカが含まれるように旋回させる、建設機械のカメラ調整システム。
【請求項4】
請求項1に記載の建設機械のカメラ調整システムにおいて、
前記カメラ補正ステップでは、前記第1補正用画像と前記第2補正用画像とを合成した合成画像を生成すると共に、前記第1補正用画像及び前記第2補正用画像の双方に含まれるマーカを特徴点として、前記第1補正用画像又は前記第2補正用画像を前記合成画像に変換する変換行列を求め、前記変換行列に基づいて前記第1カメラ又は前記第2カメラの方向を変更させる、建設機械のカメラ調整システム。
【請求項5】
請求項4に記載の建設機械のカメラ調整システムにおいて、
前記カメラ補正ステップでは、前記合成画像に対する前記第1補正用画像と前記第2補正用画像との再投影誤差を算出すると共に、前記再投影誤差が一定範囲を超えており、かつ、前記オーバーラップ量が一定値未満の場合、前記変換行列に基づいて前記第1カメラ又は前記第2カメラの方向を変更させる、建設機械のカメラ調整システム。
【請求項6】
請求項5に記載の建設機械のカメラ調整システムにおいて、
前記カメラ補正ステップでは、前記再投影誤差が一定範囲を超えており、かつ、前記オーバーラップ量が一定値以上の場合、前記変換行列で前記第1補正用画像及び前記第2補正用画像を変換した後に、変換後の前記第1補正用画像及び前記第2補正用画像を用いて、再び前記再投影誤差を算出する、建設機械のカメラ調整システム。
【請求項7】
請求項5に記載の建設機械のカメラ調整システムにおいて、
前記カメラ補正ステップでは、前記第1カメラ又は前記第2カメラの向きの補正後に、前記第1補正用画像及び前記第2補正用画像を改めて取得し、前記再投影誤差を再度算出する、建設機械のカメラ調整システム。
【請求項8】
請求項1に記載の建設機械のカメラ調整システムとしての情報処理装置を備える、建設機械。
【請求項9】
建設機械のカメラ調整方法であって、
請求項1から請求項7のいずれか1項に記載の建設機械のカメラ調整システムの各ステップを備える、建設機械のカメラ調整方法。
【請求項10】
プログラムであって、
コンピュータを、請求項1から請求項7のいずれか1項に記載の建設機械のカメラ調整システムとして機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設機械のカメラ調整システム、建設機械、建設機械のカメラ調整方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
建設機械には、周囲の状況を把握するために複数のカメラが設置される。カメラの新設時や取替時には、複数のカメラがそれぞれ正しい方向を向いているかキャリブレーションを行う必要がある。これに対し、下記の文献に開示されるように、複数のカメラの画像を合成する際に、補正を行って合成画像を形成する技術が公知である。
【先行技術文献】
【特許文献】
【0003】
特開2020-045687号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の従来技術は、画像の合成時に補正を行うものであり、カメラの方向の補正は行われない。そのため、キャリブレーションの精度に限界がある。
【0005】
本発明では上記事情に鑑み、複数のカメラのキャリブレーションを高い精度で実行できる建設機械のカメラ調整システムを提供することとした。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、建設機械のカメラ調整システムが提供される。このカメラ調整システムは、プロセッサを備える。プロセッサは、傾斜情報取得ステップと、補正値算出ステップと、カメラ補正ステップと、を実行するように構成される。傾斜情報取得ステップでは、建設機械が備える傾斜センサから傾斜情報を取得する。補正値算出ステップでは、傾斜情報に基づいて建設機械の傾斜に対する補正値を算出する。カメラ補正ステップでは、第1カメラから取得した第1補正用画像と第2カメラから取得した第2補正用画像とのオーバーラップ量が一定値以上になるように、補正値を参照しつつ第1カメラ又は第2カメラの向きを補正する。第1カメラ及び第2カメラは、建設機械の本体に設置されると共に、互いの撮影範囲が重複している。
【0007】
このような態様によれば、第1補正用画像と第2補正用画像とのオーバーラップ量を用いて、第1カメラ又は第2カメラの向きを自動で補正することができる。また、カメラの向きの補正時に、建設機械の傾斜が考慮されるため、複数のカメラのキャリブレーションを高い精度で実行できる。
【図面の簡単な説明】
【0008】
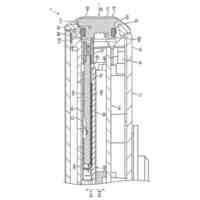
建設機械1を示す模式図である。
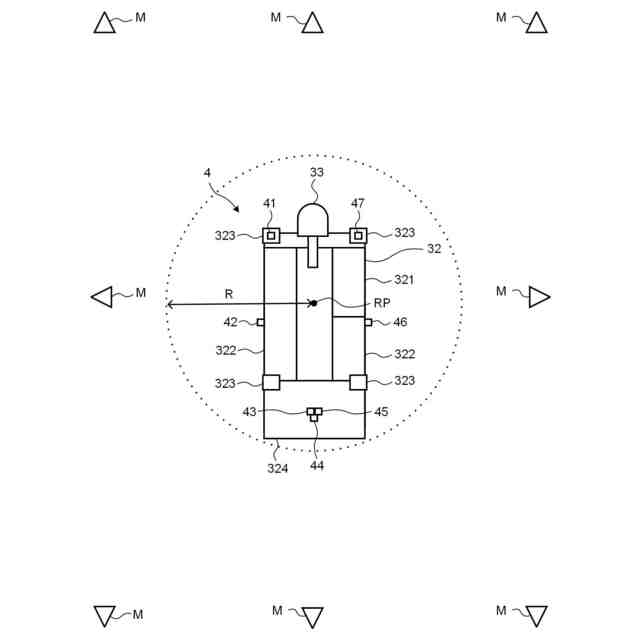
カメラ群4の配置の一例を示す平面図である。
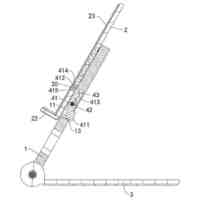
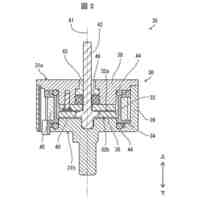
第1カメラ41の向きの調整機構の模式図である。
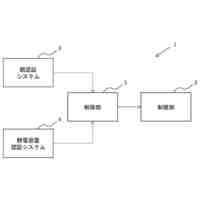
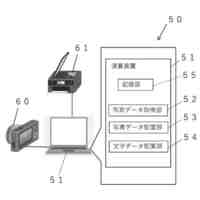
カメラ調整システム2のハードウェア構成を示すブロック図である。
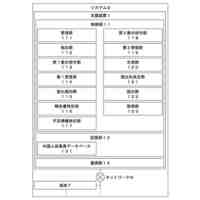
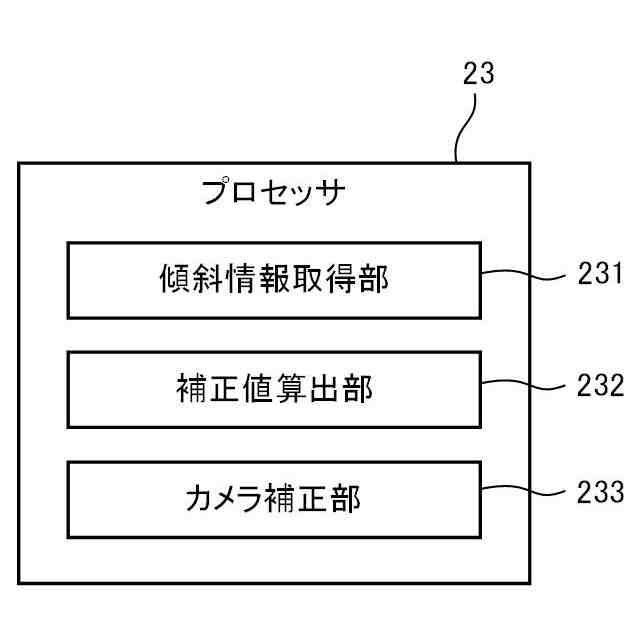
カメラ調整システム2(プロセッサ23)によって実現される機能を示すブロック図である。
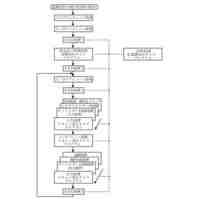
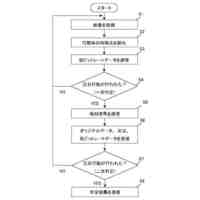
カメラ調整システム2が実行するカメラ調整処理の流れを示すフロー図である。
カメラの向き補正処理の流れを示すフロー図である。
【発明を実施するための形態】
【0009】
以下、図面を用いて本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。
【0010】
まず、本実施形態に登場するソフトウェアを実現するためのプログラムは、コンピュータが読み取り可能な非一時的な記録媒体(Non-Transitory Computer-Readable Medium)として提供されてもよいし、外部のサーバからダウンロード可能に提供されてもよいし、外部のコンピュータで当該プログラムを起動させてクライアント端末でその機能を実現(いわゆるクラウドコンピューティング)するように提供されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
政治のAI化
今日
個人
非正規コート
1か月前
個人
物品給付年金
5日前
個人
人物再現システム
1か月前
個人
RFタグ読取装置
18日前
個人
在宅介護システム
18日前
個人
AI飲食最適化プラグイン
26日前
キヤノン株式会社
通信装置
6日前
個人
電話管理システム及び管理方法
27日前
有限会社ノア
データ読取装置
1か月前
株式会社ザメディア
出席管理システム
1か月前
個人
広告提供システムおよびその方法
1か月前
個人
全アルゴリズム対応型プログラム
1日前
株式会社CROSLAN
支援装置
18日前
シャープ株式会社
電子機器
今日
大同特殊鋼株式会社
輝線検出方法
今日
個人
日誌作成支援システム
1か月前
ミサワホーム株式会社
情報処理装置
5日前
個人
ポイント還元付き配送システム
1か月前
ミサワホーム株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
欠け検査装置
今日
株式会社タクテック
商品取出集品システム
1か月前
長屋印刷株式会社
画像形成システム
18日前
株式会社アジラ
データ転送システム
今日
ひびきの電子株式会社
認証システム
20日前
オベック実業株式会社
端末用スタンド
1日前
オムロン株式会社
回転装置及びマウス
22日前
オベック実業株式会社
接続構造
1か月前
株式会社ユピテル
電子機器及びプログラム等
8日前
株式会社村田製作所
動き検知装置
1か月前
個人
コンテンツ配信システム
1か月前
トヨタ自動車株式会社
作業解析装置
今日
株式会社ドクター中松創研
生成AIの適切使用法
1か月前
トヨタ自動車株式会社
情報処理装置
4日前
個人
アルバム作成システム及びアルバム作成方法
20日前
トヨタ自動車株式会社
更新システム
今日
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ