TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071855
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182236
出願日
2023-10-24
発明の名称
車両の注意喚起装置及び注意喚起方法
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/14 20200101AFI20250430BHJP(車両一般)
要約
【課題】個々の運転者にとってより適切なタイミングで運転者の先行車両に対する注意を喚起するための注意喚起動作を行う。
【解決手段】車両の注意喚起装置の運転支援ECU10は、自車両の運転者によって自車両が先行車両に追従している先行車追従状態にある場合、先行車両が自車両に急接近する際に成立する急接近条件が成立したと判定したとき、運転者によって実行される減速操作の特性を表す操作特性値(ブレーキペダルを踏込み始めるまでの反応時間、最大減速度、減速度変化率)を取得し、且つ、その操作特性値に応じて変化する操作特性学習値を記憶装置に記憶する。運転支援ECUは、先行車追従状態が新たに発生したと判定した場合、操作特性学習値を用いて「維持すべき必要車間距離」を算出し、且つ、実際の車間距離が必要車間距離以下であるとの条件を含む注意喚起条件が成立したと判定した場合、運転者の注意を喚起するための注意喚起動作を行う。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の速度である自車速についての情報及び前記自車両のブレーキペダルの操作状態についての情報を含む自車情報を取得する第1取得装置と、
先行車両と前記自車両との車間距離についての情報及び前記先行車両の相対速度についての情報を含む先行車情報を取得する第2取得装置と、
警告の表示及び警報音の発生の少なくとも一方を前記自車両の運転者の注意を喚起するための注意喚起動作として実行する警報装置と、
前記警報装置を制御するコントローラと、
を備えた車両の注意喚起装置において、
前記コントローラは、
前記運転者の運転操作によって前記自車両が前記先行車両に追従している先行車追従状態において前記自車両と前記先行車両とが急激に接近し始めた場合に成立する所定の急接近条件が成立したと前記自車情報及び前記先行車情報に基いて判定した場合、前記急接近条件の成立時点以降において前記運転者によって実行される前記自車両を減速させるための減速操作の特性を表す操作特性値を前記自車情報に基いて取得し、且つ、前記操作特性値に応じて変化する操作特性学習値を記憶装置に記憶し、
前記先行車追従状態が新たに発生したと判定した場合、前記操作特性学習値を用いて前記自車両が前記先行車両との間に維持すべき必要車間距離を算出し、且つ、前記車間距離が前記必要車間距離以下である場合に成立する条件を含む注意喚起条件が成立したと判定した場合に前記注意喚起動作を前記警報装置に実行させる、
ように構成された、
車両の注意喚起装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の車両の注意喚起装置において、
前記コントローラは、
前記先行車追従状態において前記車間距離の単位時間あたりの減少量の大きさが閾値以上となる条件が成立したか否かを前記車間距離又は前記相対速度に基いて判定することにより前記急接近条件が成立したか否かを判定するように構成された、
車両の注意喚起装置。
【請求項3】
請求項2に記載の車両の注意喚起装置において、
前記コントローラは、
前記操作特性値として、
前記急接近条件の成立時点から前記ブレーキペダルの操作が開始されるまでの時間である反応時間、
前記急接近条件の成立時点後において前記ブレーキペダルの操作により生じた前記自車両の減速度、及び、
前記急接近条件の成立時点後において前記ブレーキペダルの操作により生じた前記自車両の前記減速度の単位時間あたりの変化量の大きさである減速度変化率、
を取得し、
前記操作特性学習値として、
前記取得した前記反応時間に応じて変化する反応時間学習値、
前記取得した前記減速度に応じて変化する減速度学習値、及び、
前記取得した前記減速度変化率に応じて変化する減速度変化率学習値、
を前記記憶装置に記憶し、
前記必要車間距離として、
前記反応時間学習値、前記減速度学習値、前記減速度変化率学習値、現時点における前記自車速と現時点における前記相対速度とに基いて求められる前記先行車両の現時点における速度である先行車速、及び、予め定められた前記先行車両の仮想的な減速度である想定先行車減速度に基いて、前記自車両と前記先行車両とが最も接近すると推定される時点までの車間距離の減少量の大きさの最大値である最大接近距離又は当該最大接近距離に基く値を算出する、
ように構成された、
車両の注意喚起装置。
【請求項4】
請求項3に記載の車両の注意喚起装置において、
前記コントローラは、
前記操作特性学習値を、前記急接近条件が成立した時点の前記車間距離を同時点の前記自車速で除した値である急接近時車間時間が属する複数の時間範囲の一つに関連付けて記憶し、
前記先行車追従状態が新たに発生したと判定した時点の前記車間距離を同時点の前記自車速で除した値である新車間時間が属する前記複数の時間範囲の一つに関連付けて記憶されている前記操作特性学習値を用いて前記必要車間距離を算出する、
ように構成された、
車両の注意喚起装置。
【請求項5】
自車両の運転者の先行車両に対する注意を喚起するために、警告の表示及び警報音の発生の少なくとも一方を注意喚起動作として実行する車両の注意喚起方法であって、
前記運転者の運転操作によって前記自車両が前記先行車両に追従している先行車追従状態において前記自車両と前記先行車両とが急激に接近し始めた場合に成立する所定の急接近条件が成立したか否かを判定するステップと、
前記急接近条件が成立したと判定した場合、前記急接近条件の成立時点以降において前記運転者によって実行される前記自車両を減速させるための減速操作の特性を表す操作特性値を取得し、且つ、前記操作特性値に応じて変化する操作特性学習値を記憶装置に記憶するステップと、
前記先行車追従状態が新たに発生したと判定した場合、前記操作特性学習値を用いて前記自車両が前記先行車両との間に維持すべき必要車間距離を算出するステップと、
前記車間距離が前記必要車間距離以下であるとの条件を含む注意喚起条件が成立したと判定した場合に前記注意喚起動作を実行するステップと、
を含む、車両の注意喚起方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両と先行車両との車間距離が短い場合に自車両の運転者の注意を喚起するための注意喚起動作を行う車両の注意喚起装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
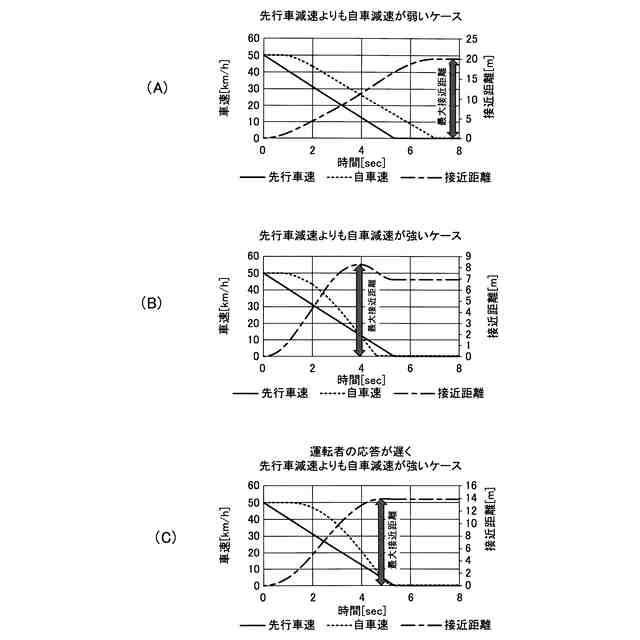
従来の装置は、先行車速、先行車両の減速度、自車速、自車両の想定減速度、及び、自車両が制動を開始するまでの空走時間に基いて、先行車両の減速開始時点以降において自車両と先行車両との車間距離の短縮量の最大値(最大接近距離)を推定する。従来の装置は、現在の自車両と先行車両との車間距離が「最大接近距離に基く適正車間距離」以下である場合に警報を発する(特許文献1を参照。)。
【先行技術文献】
【特許文献】
【0003】
特開平6-231400号公報
【発明の概要】
【0004】
運転者がアクセルペダルの踏み込みを解除してからブレーキペダルの踏み込みを開始し始めるまでの時間(空走時間に相当するペダル踏替え時間)、及び、ブレーキペダルの踏込みにより生じる自車両の減速度は、運転者毎に相違する。従って、最大接近距離及び適正車間距離は運転者毎に相違する。そこで、上記従来の装置は、実際のペダル踏替え時間を計測し、計測した時間に基く値を「適正車間距離を算出する際に用いる空走時間」として用いる。更に、上記従来の装置は、ブレーキペダルの踏込みにより生じる自車両の減速度を計測し、その減速度に基く値を「最大接近距離を算出する際に用いる自車両の想定減速度」として用いる。
【0005】
しかしながら、上記従来の装置が計測する「ペダル踏替え時間及び減速度」は、自車両が先行車両に急接近するような切迫した状況のみならず、通常の運転中にも計測される。従って、空走時間及び想定減速度が切迫した状況(最大接近距離を算出する状況)に対する値として適切でなく、その結果、最大接近距離及び適正車間距離が適切な値から乖離するから、警報が適切なタイミングで行われ得ない恐れがある。
【0006】
本発明は、係る課題を解決するためになされた。即ち、本発明の目的の一つは、個々の運転者にとってより適切なタイミングで運転者の先行車両に対する注意を喚起するための注意喚起動作(例えば、警告表示及び/又は警報音発生)を行うことが可能な車両の注意喚起装置及び注意喚起方法を提供することにある。
【0007】
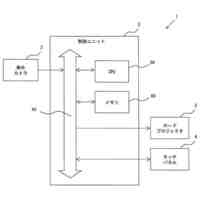
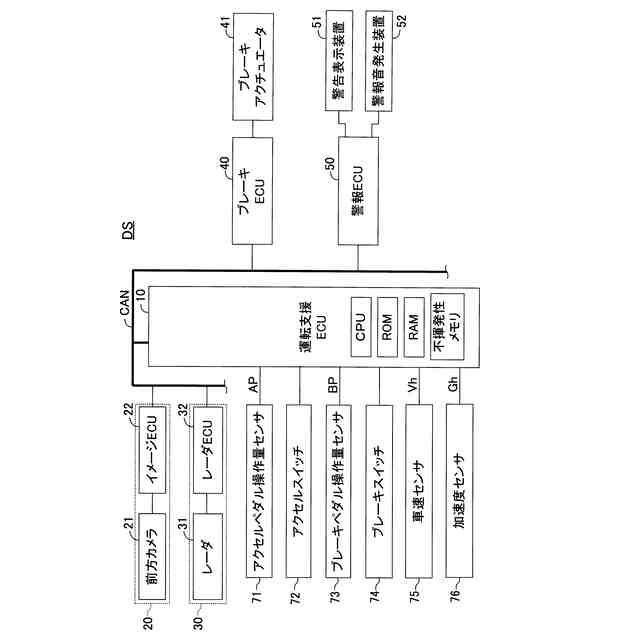
本発明の車両の注意喚起装置(以下、「本発明装置」とも呼称する。)の一態様は、
自車両の速度である自車速についての情報及び前記自車両のブレーキペダルの操作状態についての情報を含む自車情報を取得する第1取得装置(71-76)と、
先行車両と前記自車両との車間距離についての情報及び前記先行車両の相対速度についての情報を含む先行車情報を取得する第2取得装置(20,30)と、
警告の表示及び警報音の発生の少なくとも一方を前記自車両の運転者の注意を喚起するための注意喚起動作として実行する警報装置(40-42)と、
前記警報装置を制御するコントローラ(10)と、
を備える。
更に、前記コントローラは、
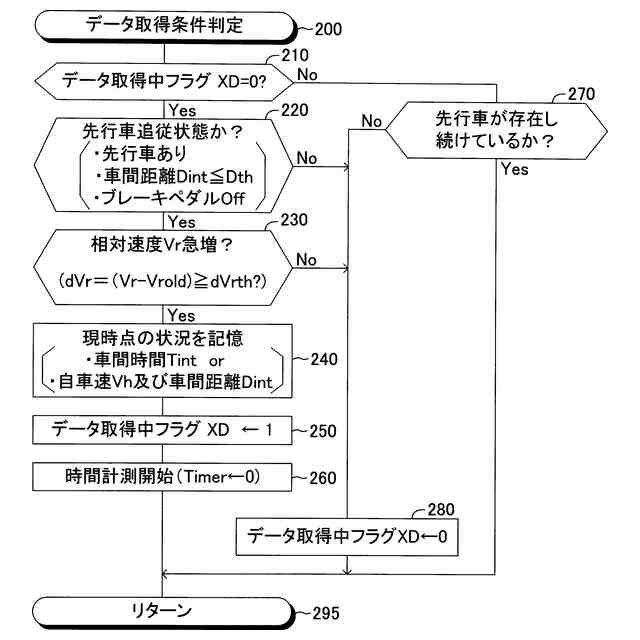
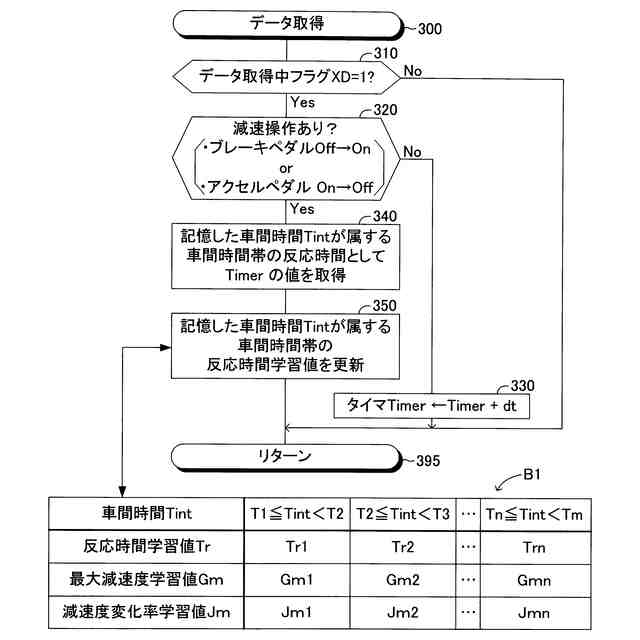
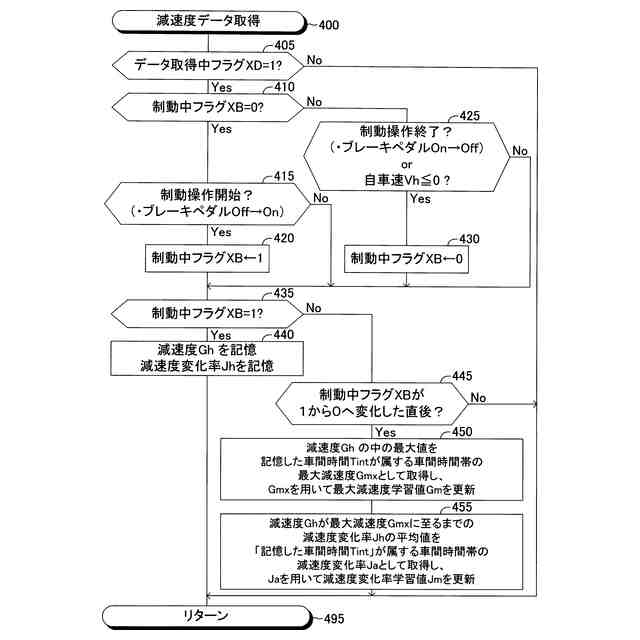
前記運転者の運転操作によって前記自車両が前記先行車両に追従している先行車追従状態において(S220:Yes)前記自車両と前記先行車両とが急激に接近し始めた場合に成立する所定の急接近条件が成立したと前記自車情報及び前記先行車情報に基いて判定した場合(S230:Yes)、前記急接近条件の成立時点以降において前記運転者によって実行される前記自車両を減速させるための減速操作の特性を表す操作特性値を前記自車情報に基いて取得し(S340、S450、S455)、且つ、前記操作特性値に応じて変化する操作特性学習値を記憶装置に記憶し(S350、S450、S455)、
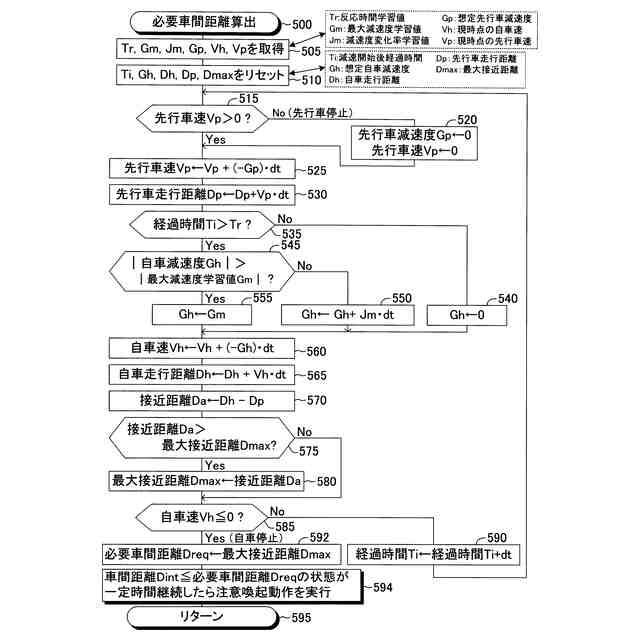
前記先行車追従状態が新たに発生したと判定した場合、前記操作特性学習値を用いて前記自車両が前記先行車両との間に維持すべき必要車間距離を算出し(S505-S592)、且つ、前記車間距離が前記必要車間距離以下である場合に成立する条件を含む注意喚起条件が成立したと判定した場合に前記注意喚起動作を前記警報装置に実行させる(S594)。
【0008】
本発明装置によれば、自車両と先行車両とが実際に急激に接近し始めた時点(即ち、急接近条件の成立時点)以降における運転者の減速操作の特性を表す操作特性値が取得され、その操作特性値に応じて操作特性学習値が記憶される。更に、その操作特性学習値が必要車間距離の算出に使用される。従って、必要車間距離が個々の運転者の切迫した状況における減速操作特性に応じた値になるので、注意喚起動作を適切なタイミングにて行うことができる。
【0009】
上記説明においては、本発明の理解を助けるために、後述する実施形態に対応する発明の構成に対し、その実施形態で用いた名称及び/又は符号を括弧書きで添えている。しかしながら、本発明の各構成要素は、前記名称及び/又は符号によって規定される実施形態に限定されるものではない。本発明は車両の注意喚起方法及びそのプログラムにも及ぶ。
【図面の簡単な説明】
【0010】
本発明の実施形態に係る車両の注意喚起装置の概略構成図である。
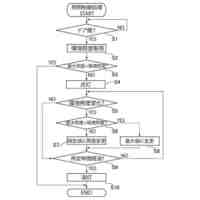
図1に示した運転支援ECUのCPUが実行するルーチンである。
図1に示した運転支援ECUのCPUが実行するルーチンである。
図1に示した運転支援ECUのCPUが実行するルーチンである。
図1に示した運転支援ECUのCPUが実行するルーチンである。
(A)、(B)及び(C)は、最大接近距離を説明するためのグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
25日前
個人
授乳用車両
3か月前
個人
小型EVシステム
27日前
日本精機株式会社
ケース
1か月前
日本精機株式会社
表示装置
2か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
照明装置
1か月前
個人
ブレーキシステム
1か月前
株式会社松華
懸架装置
1か月前
個人
自動車ドア開度規制ベルト
26日前
個人
ステージカー
1か月前
個人
自走式立体型洗車場
1か月前
横浜ゴム株式会社
タイヤ
1か月前
日本精機株式会社
車両用表示装置
2か月前
井関農機株式会社
作業車両
9日前
株式会社ユーシン
照明装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
株式会社ユーシン
照明装置
9日前
帝国繊維株式会社
作業車両
1か月前
マツダ株式会社
車両
2か月前
マツダ株式会社
車両
3か月前
マツダ株式会社
車両
2か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
車両用照明装置
2か月前
個人
農業機械への架線給電システム
1か月前
コイト電工株式会社
座席装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ