TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025071325
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2025028826,2023106117
出願日
2025-02-26,2017-06-30
発明の名称
振動波モータ
出願人
株式会社ニコン
代理人
藤央弁理士法人
主分類
H02N
2/12 20060101AFI20250424BHJP(電力の発電,変換,配電)
要約
【課題】低密度でも良好な駆動特性を得ることができる振動波モータを提供する。
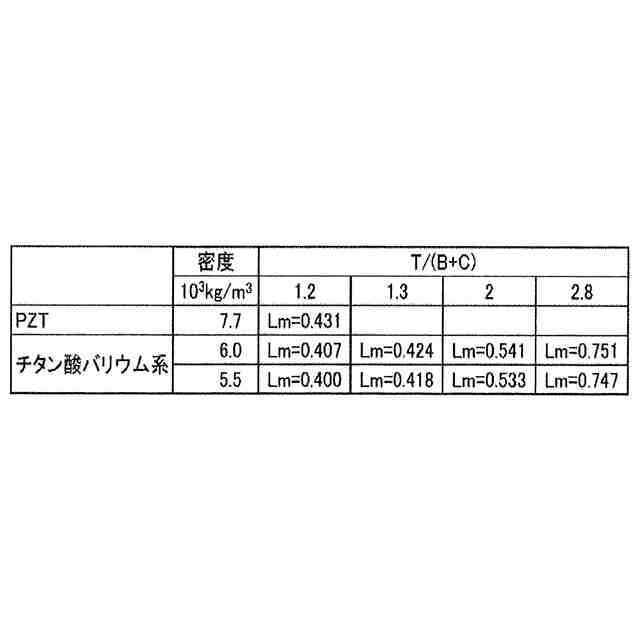
【解決手段】本発明の振動波モータ10は、電気機械変換素子13との、前記電気機械変換素子13の振動により、駆動面に振動波が生じる弾性体12と、前記弾性体12の前記駆動面に接触し、前記振動波によって回転駆動される相対運動部材15と、を備え前記電気機械変換素子13は、密度が4.2~6.0×10
3
kg/m
3
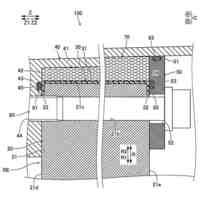
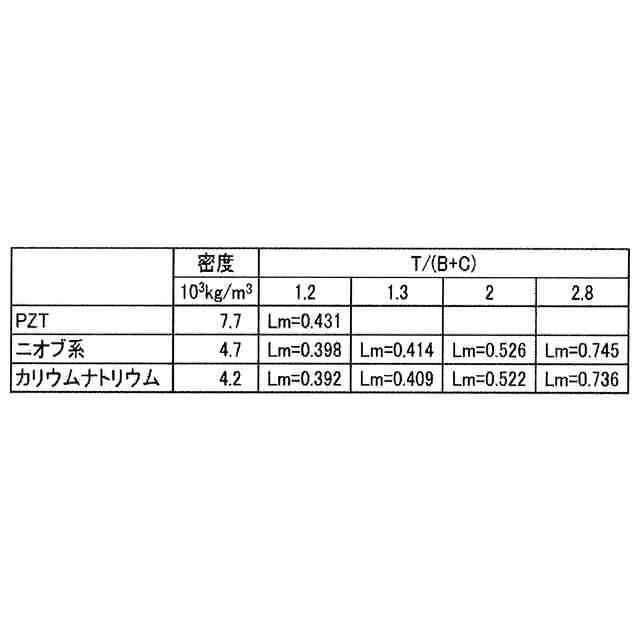
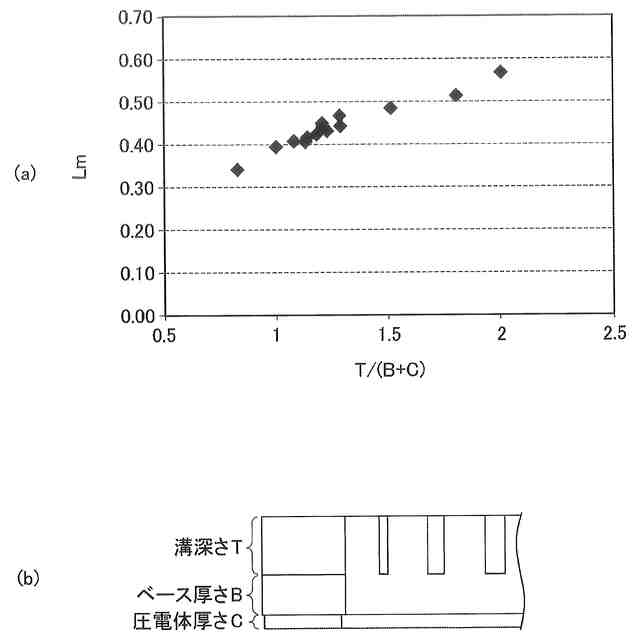
であり、前記弾性体12の前記駆動面側には複数の溝12cが設けられ、前記複数の溝12cの少なくとも一つの溝の深さをTとし、前記溝12cの底部から前記電気機械変換素子が接触する前記弾性体の接合面までの厚さをBとし、前記電気機械変換素子13の厚さをCと定義した場合、T/(B+C)の値が、1.3~2.8の範囲である。
【選択図】図10
特許請求の範囲
【請求項1】
電気機械変換素子と、
前記電気機械変換素子の振動により、駆動面に振動波が生じる弾性体と、
前記弾性体の前記駆動面に接触し、前記振動波によって回転駆動される相対運動部材と、
を備える振動波モ-タにおいて、
前記電気機械変換素子は、密度が4.2~6.0×10
3
kg/m
3
であり、
前記弾性体の前記駆動面側には複数の溝が設けられ、
前記複数の溝の少なくとも一つの溝の深さをTとし、
前記溝の底部から前記第1面までの厚さをBとし、
前記電気機械変換素子の厚さをCと定義した場合、
T/(B+C)の値が、1.3~2.8の範囲である、
振動波モータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、振動波モータ及び光学機器に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
振動波モータは、圧電体の伸縮を利用して弾性体の駆動面に進行性振動波(後は進行波と略する)を発生させる(特許文献1参照)。この様な振動波モータの振動子は、一般的には、電気機械変換素子(以降、圧電体と称する)と、弾性体とから構成される。従来、圧電体は、一般的には通称PZTと呼ばれるチタン酸ジルコン酸鉛といった材料から構成されているが、近年では環境問題から鉛フリーの材料が研究され、振動波モータへの搭載が検討されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特公平1-17354号公報
【発明の概要】
【0004】
本発明は、電気機械変換素子と、前記電気機械変換素子の振動により、駆動面に振動波が生じる弾性体と、前記弾性体の前記駆動面に接触し、前記振動波によって回転駆動される相対運動部材と、を備える振動波モ-タにおいて、前記電気機械変換素子は、密度が4.2~6.0×10
3
kg/m
3
であり、前記弾性体の前記駆動面側には複数の溝が設けられ、前記複数の溝の少なくとも一つの溝の深さをTとし、前記溝の底部から前記電気機械変換素子が接触する前記弾性体の接合面までの厚さをBとし、前記電気機械変換素子の厚さをCと定義した場合、T/(B+C)の値が、1.3~2.8の範囲である、構成とした。
また、本発明の光学機器は、上記振動波モータを備える構成とした。
【図面の簡単な説明】
【0005】
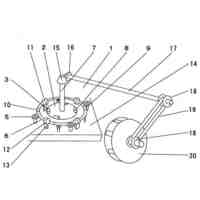
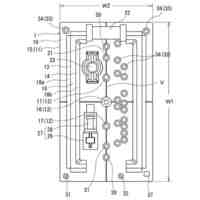
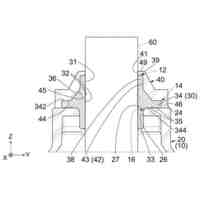
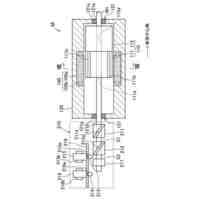
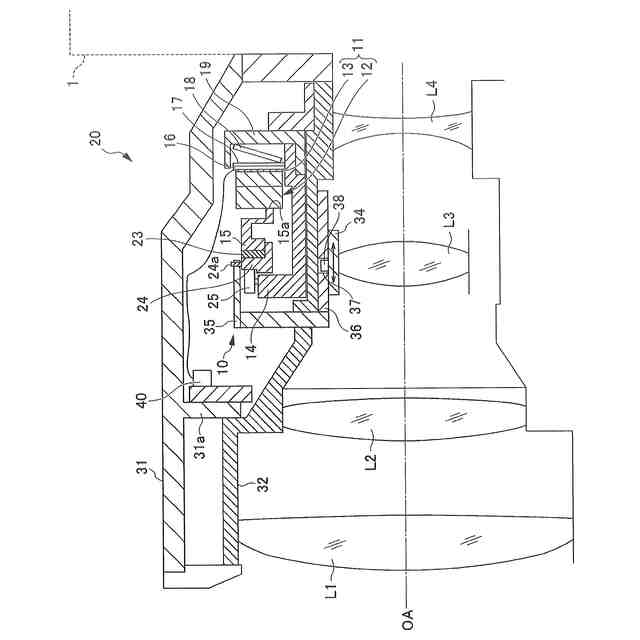
実施形態の振動波モータ10を組み込んだレンズ鏡筒20及びカメラ1の概略断面図である。
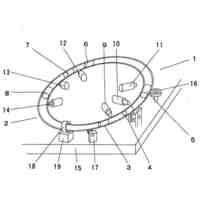
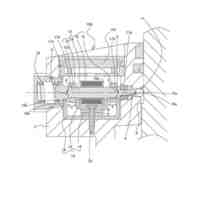
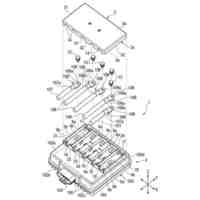
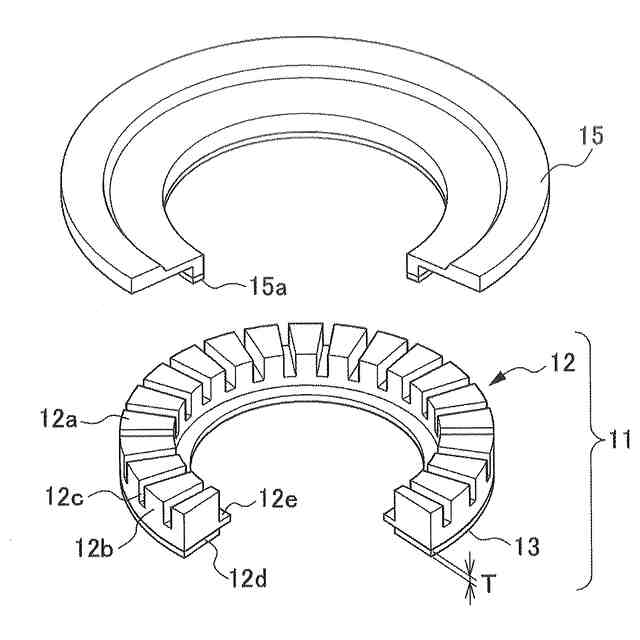
振動子11および移動子15の一部を切り欠いた斜視図である。
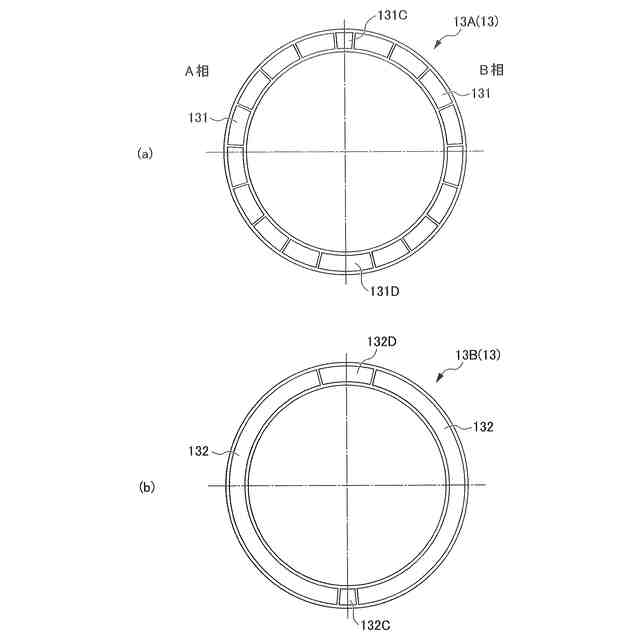
圧電体13を示す図で、(a)は弾性体との接合面、(b)その裏面である。
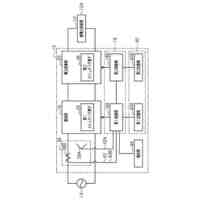
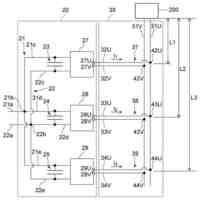
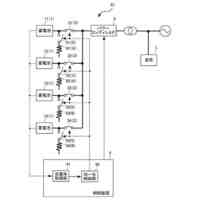
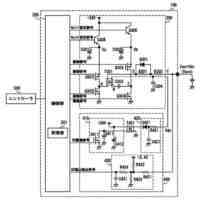
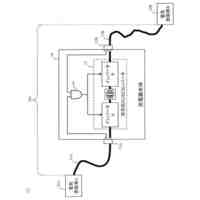
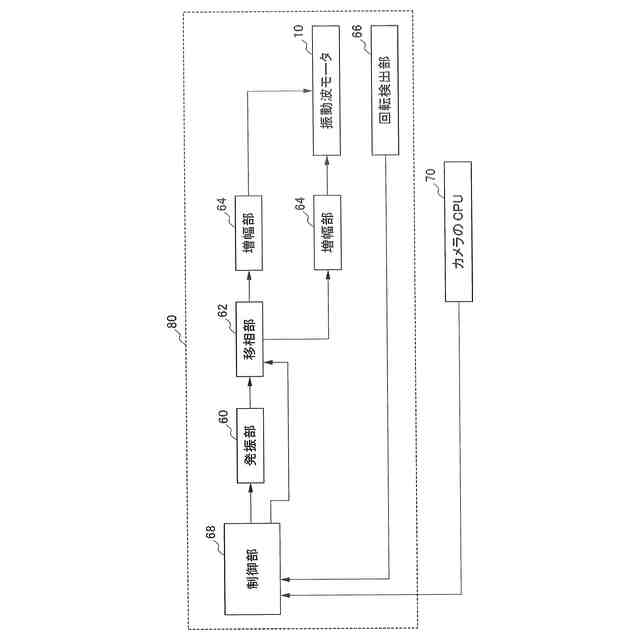
実施形態の振動波モータ10の駆動装置80を説明するブロック図である。
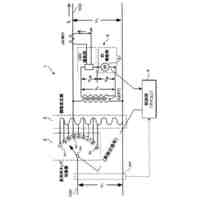
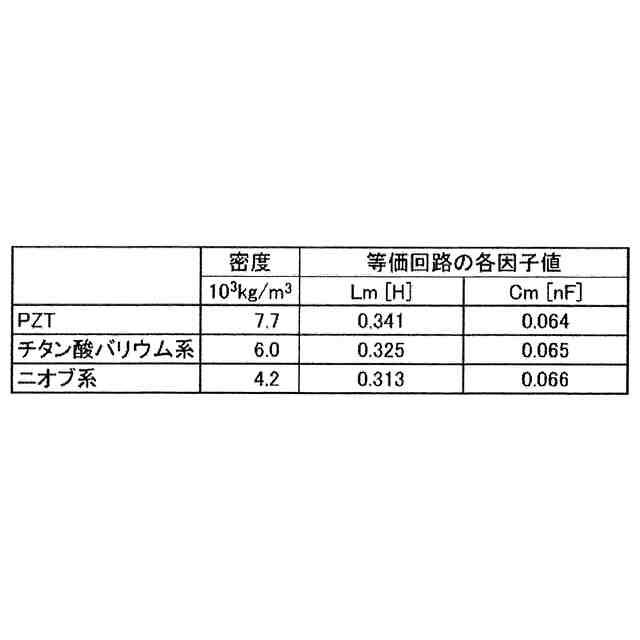
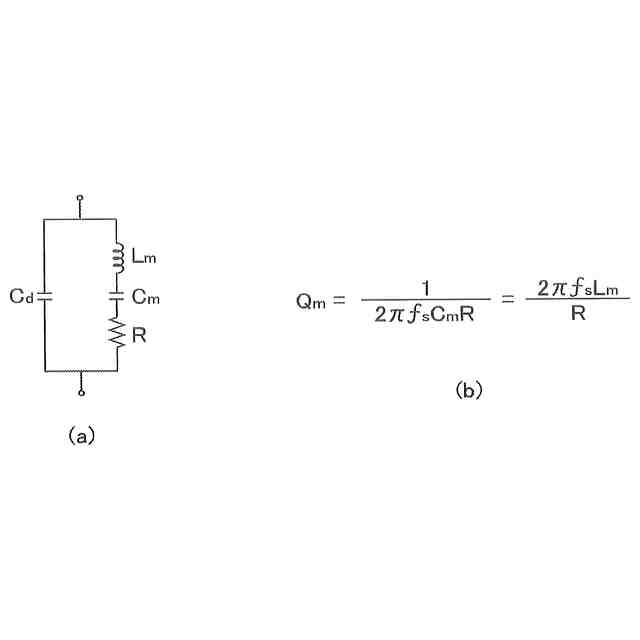
振動波モータ10の振動子11の等価回路を説明する図であり、(a)は等価回路、(b)は機械的品質係数Qmの計算式である。
T値、B値、C値をそれぞれ変化させ、CAE解析にてLm値を算出した結果を示したグラフである。
T/(B+C)と駆動電圧との関係を示したグラフである。
T/(B+C)と振動子11の突起部12dの挙動との関係を説明する図であり、(a)は、T/(B+C)が小さい場合、(b)は、T/(B+C)が大きい場合である。
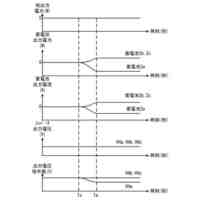
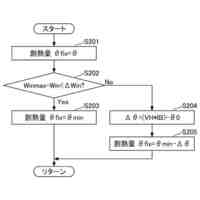
振動波モータ10を起動する時のシーケンスである。
図7のグラフに数値を記入した図である。
【発明を実施するための形態】
【0006】
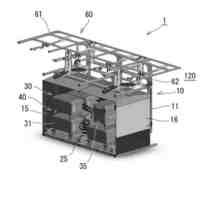
以下、振動波モータ10の実施形態について、添付図面を参照しながら詳細に説明する。図1は、実施形態の振動波モータ10を組み込んだレンズ鏡筒20及びカメラ1の概略断面図である。
【0007】
実施形態は、振動波モータとして、円環型振動波モータ10について説明する。
レンズ鏡筒20は外側固定筒31と内側固定筒32を有する。その外側固定筒31と内側固定筒32との間に振動波モータ10を有するモータユニットを固定する機構となっている。
【0008】
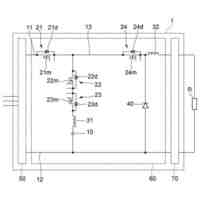
駆動回路40は、レンズ鏡筒20の外側固定筒31と内側固定筒32の間に設けられ、振動波モータ10の駆動、制御、回転数の検出、振動センサーの検出等を行う。
【0009】
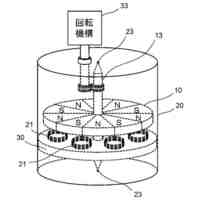
次に、振動波モータ10について説明する。振動波モータ10は、振動子11と移動子15とを有する。図2は、振動子11および移動子15の一部を切り欠いた斜視図である。
【0010】
振動子11は、電気エネルギ-を機械エネルギ-に変換する圧電素子や電歪素子等を例とした電気機械変換素子(以下、圧電体13と称する)と、圧電体13を接合した弾性体12とから構成されている。振動子11には進行波が発生するようにされているが、本実施形態では一例として9波の進行波として説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
10日前
個人
発電機
6日前
ニデック株式会社
モータ
2日前
個人
ファスナー式コード束ね
25日前
個人
高電荷低電位電荷搬送体
24日前
株式会社豊田自動織機
回転電機
24日前
個人
回転電気装置及び発電装置
26日前
未来工業株式会社
ゲージ
24日前
株式会社コスメック
自立発電装置
26日前
株式会社豊田自動織機
回転電機のロータ
25日前
株式会社アイシン
車両用駆動装置
18日前
株式会社シマノ
電力供給装置
11日前
富士電機株式会社
半導体装置
10日前
株式会社浅羽製作所
通線用先端誘導具
17日前
株式会社ダイヘン
電圧調整装置
2日前
株式会社ダイヘン
電力システム
12日前
トヨタ自動車株式会社
蓄電池制御装置
12日前
トヨタ紡織株式会社
磁石挿入装置
2日前
コーセル株式会社
スイッチング電源装置
24日前
高周波熱錬株式会社
電源装置
25日前
株式会社ゲットクリーンエナジー
発電機
3日前
高周波熱錬株式会社
電源装置
25日前
日本航空電子工業株式会社
シール構造体
20日前
株式会社ダイヘン
蓄電池システム
17日前
株式会社ミツバ
端子ユニット
24日前
キヤノン株式会社
電源装置、画像形成装置
11日前
矢崎総業株式会社
グロメット
20日前
ニデック株式会社
ステータ、モータ及びドローン
25日前
トヨタ自動車株式会社
充電制御装置
10日前
株式会社ダイヘン
無線給電システム
2日前
GX株式会社
可搬式太陽光発電用電源装置
10日前
本田技研工業株式会社
回転電機
24日前
株式会社ミツバ
モータ制御装置
24日前
株式会社ミツバ
モータ制御装置
24日前
株式会社オリジン
充電器
20日前
マツダ株式会社
モータ
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ