TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067528
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177586
出願日
2023-10-13
発明の名称
運転支援装置、運転支援方法及びプログラム
出願人
いすゞ自動車株式会社
代理人
弁理士法人創光国際特許事務所
主分類
B60T
7/12 20060101AFI20250417BHJP(車両一般)
要約
【課題】後進する車両と移動物の衝突を回避する際に適切な回避制御を実行させる。
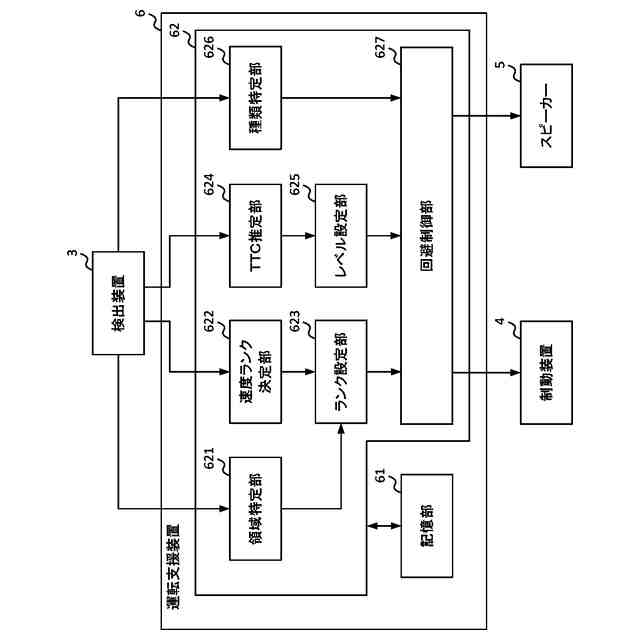
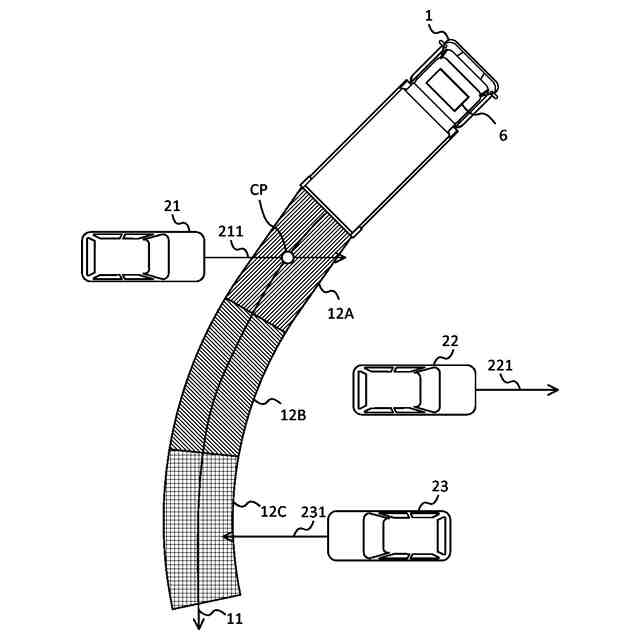
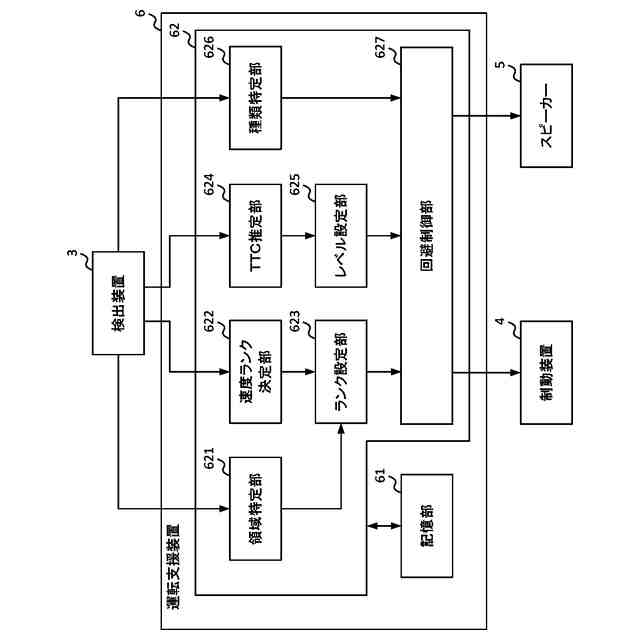
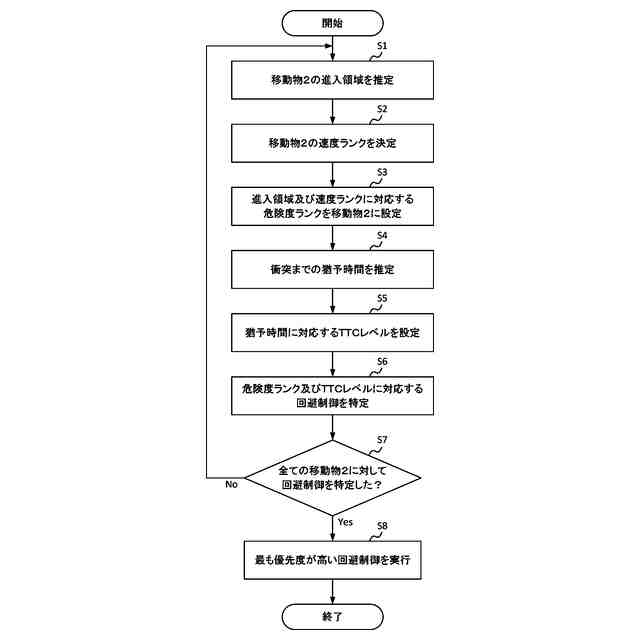
【解決手段】運転支援装置6は、後進する後進車両と移動物との衝突の危険度を示す複数の危険度ランクの各々と、後進車両と移動物との衝突を回避可能な回避制御と、を関連付けた制御情報を記憶する記憶部61と、後進車両の推定経路に沿って設定された複数の領域のうちの、後進車両の周辺に存在する移動物が進入する進入領域を特定する領域特定部621と、制御情報に基づいて、推定された進入領域に対応する危険度ランクに関連付けられた回避制御を後進車両に実行させる回避制御部627と、を有する。
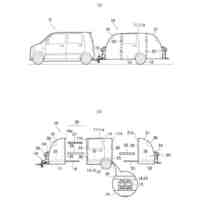
【選択図】図2
特許請求の範囲
【請求項1】
後進する後進車両と移動物との衝突の危険度を示す複数の危険度ランクの各々と、前記後進車両と前記移動物との衝突を回避可能な回避制御と、を関連付けた制御情報を記憶する記憶部と、
前記後進車両の推定経路に沿って設定された複数の領域のうちの、前記後進車両の周辺に存在する移動物が進入する進入領域を特定する領域特定部と、
前記制御情報に基づいて、推定された前記進入領域に対応する危険度ランクに関連付けられた回避制御を前記後進車両に実行させる回避制御部と、
を有する運転支援装置。
続きを表示(約 2,000 文字)
【請求項2】
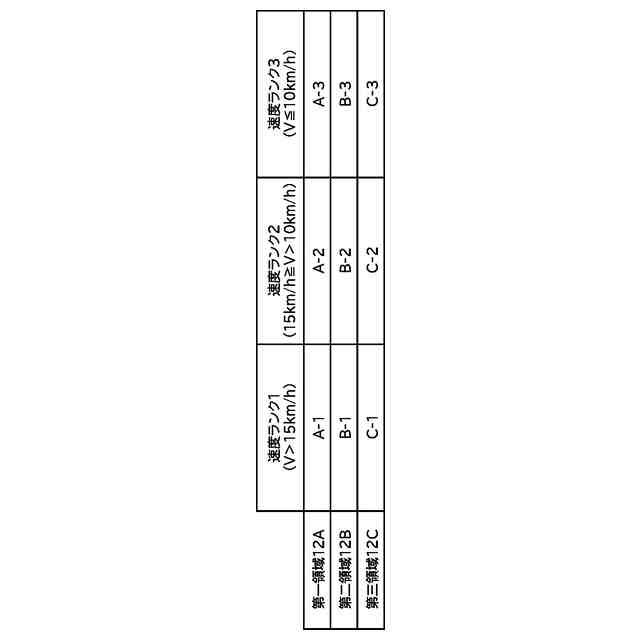
前記後進車両の速度と、前記後進車両に対する前記移動物の相対速度とにより定まる前記移動物の速度に対応する速度ランクを決定する決定部を有し、
前記記憶部は、前記複数の危険度ランクの各々と、前記移動物の速度に応じた複数の速度ランクの各々と、前記回避制御と、を関連付けた前記制御情報を記憶し、
前記回避制御部は、前記進入領域の危険度ランク及び前記速度ランクに関連付けられた回避制御を前記後進車両に実行させる、
請求項1に記載の運転支援装置。
【請求項3】
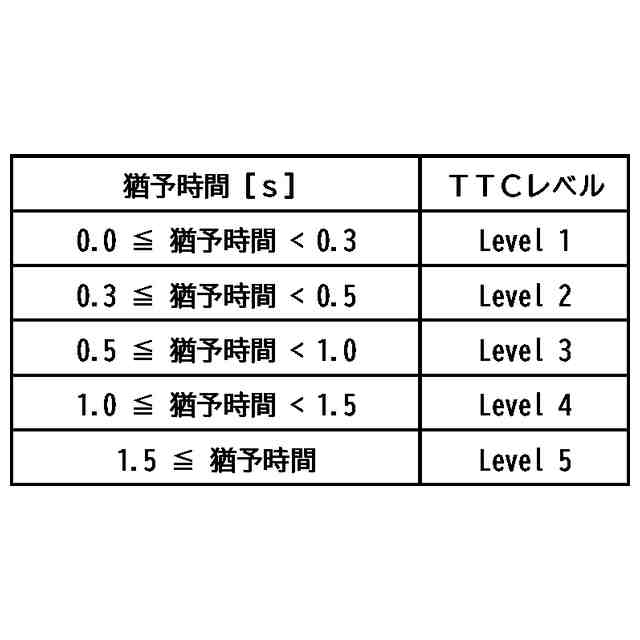
前記後進車両と前記移動物とが衝突するまでの猶予時間を推定する推定部を有し、
前記記憶部は、前記複数の危険度ランクの各々と、前記移動物の速度に応じた複数の速度ランクの各々と、前記猶予時間に応じた複数のレベルの各々と、前記回避制御と、を関連付けた前記制御情報を記憶し、
前記推定部は、前記後進車両の推定経路と前記移動物の推定経路とが交差する交差位置と前記後進車両の位置との距離と、前記後進車両の速度とにより定まる時間を前記猶予時間として推定し、
前記回避制御部は、前記進入領域の危険度ランク、前記速度ランク、及び推定された前記猶予時間に対応するレベルに関連付けられた回避制御を前記後進車両に実行させる、
請求項2に記載の運転支援装置。
【請求項4】
前記制御情報の複数の前記回避制御の各々には、優先度が設定されており、
前記領域特定部は、前記後進車両の周囲の複数の前記移動物の各々が進入する進入領域を推定し、
前記回避制御部は、各移動物の前記進入領域の危険度ランクに関連付けられた複数の前記回避制御のうちの、最も優先度が高い回避制御を前記後進車両に実行させる、
請求項1から3のいずれか一項に記載の運転支援装置。
【請求項5】
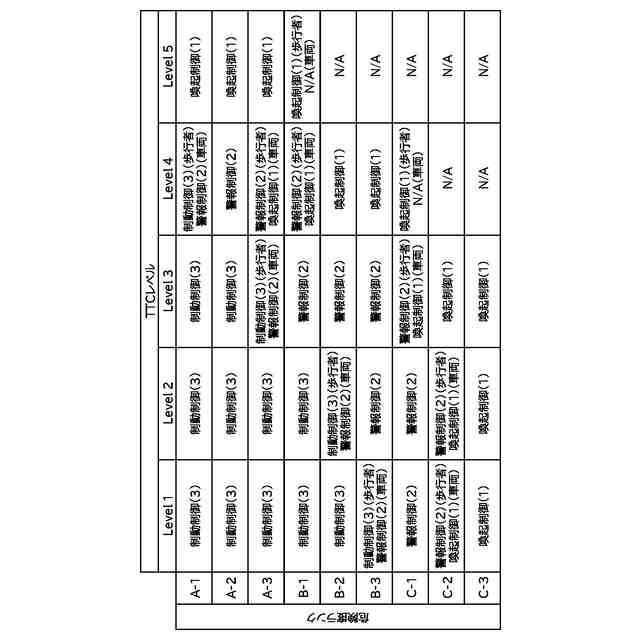
前記複数の回避制御は、
前記後進車両と前記移動物との衝突を回避可能な制動力を前記後進車両に発生させる制御であり、かつ最も高い優先度が付けられた制動制御と、
前記移動物が前記後進車両に接近することを報知する喚起音を出力する制御であり、かつ最も低い優先度が付けられた喚起制御と、
前記後進車両と前記移動物との衝突を報知する警報音を出力する制御であり、かつ前記最も高い優先度と前記最も低い優先度との間の優先度が付けられた警報制御とを含む、
請求項4に記載の運転支援装置。
【請求項6】
前記移動物の種類を特定する種類特定部を有し、
前記回避制御部は、前記回避制御に前記移動物の種類が関連付けられた前記制御情報を参照して、前記進入領域の危険度ランク、及び前記移動物の種類に関連付けられた前記回避制御を前記後進車両に実行させる、
請求項1から3のいずれか一項に記載の運転支援装置。
【請求項7】
前記危険度ランクには、前記移動物の種類として車両及び歩行者と、前記車両に対応する回避制御及び前記歩行者に対応する回避制御と、が関連付けられており、
前記種類特定部は、前記移動物が車両であるか、歩行者であるかを推定し、
前記回避制御部は、
前記移動物が車両であると推定された場合には、推定された前記進入領域の危険度ランク及び前記車両に関連付けられた回避制御を前記後進車両に実行させ、
前記移動物が歩行者であると推定された場合には、推定された前記進入領域の危険度ランク及び前記歩行者に関連付けられた回避制御を前記後進車両に実行させる、
請求項6に記載の運転支援装置。
【請求項8】
後進する後進車両に搭載されたプロセッサが実行する、
前記後進車両の推定経路に沿って設定された複数の領域のうちの、移動物が進入する進入領域を特定するステップと、
前記後進車両と移動物との衝突の危険度を示す複数の危険度ランクの各々と、前記後進車両と前記移動物との衝突を回避可能な回避制御と、を関連付けた制御情報に基づいて、推定された前記進入領域に対応する危険度ランクに関連付けられた回避制御を前記後進車両に実行させるステップと、
を有する運転支援方法。
【請求項9】
後進する後進車両に搭載されたプロセッサを、
前記後進車両の推定経路に沿って設定された複数の領域のうちの、移動物が進入する進入領域を特定する特定部、及び
前記後進車両と移動物との衝突の危険度を示す複数の危険度ランクの各々と、前記後進車両と前記移動物との衝突を回避可能な回避制御と、を関連付けた制御情報に基づいて、推定された前記進入領域に対応する危険度ランクに関連付けられた回避制御を前記後進車両に実行させる回避制御部、
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転を支援する運転支援装置、運転支援方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
後進する車両と、当該車両に接近する移動物との衝突を回避する技術が知られている。特許文献1には、後進する車両の予測経路と移動物の予測経路とが交差する場合には、車両の自動ブレーキを作動させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-128213号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の技術では、後進する車両と移動物とが離れていて旋回等で衝突を回避できる状況でも、車両の予測経路と移動物の予測経路が交差すると、車両と移動物の衝突を回避するために自動ブレーキを作動させてしまうことがある。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、後進する車両と移動物の衝突を回避する際に適切な回避制御を実行させることを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様においては、後進する後進車両と移動物との衝突の危険度を示す複数の危険度ランクの各々と、前記後進車両と前記移動物との衝突を回避可能な回避制御と、を関連付けた制御情報を記憶する記憶部と、前記後進車両の推定経路に沿って設定された複数の領域のうちの、前記後進車両の周辺に存在する移動物が進入する進入領域を特定する領域特定部と、前記制御情報に基づいて、推定された前記進入領域に対応する危険度ランクに関連付けられた回避制御を前記後進車両に実行させる回避制御部と、を有する運転支援装置を提供する。
【0007】
前記後進車両の速度と、前記後進車両に対する前記移動物の相対速度とにより定まる前記移動物の速度に対応する速度ランクを決定する決定部を有し、前記記憶部は、前記複数の危険度ランクの各々と、前記移動物の速度に応じた複数の速度ランクの各々と、前記回避制御と、を関連付けた前記制御情報を記憶し、前記回避制御部は、前記進入領域の危険度ランク及び前記速度ランクに関連付けられた回避制御を前記後進車両に実行させてもよい。
【0008】
前記後進車両と前記移動物とが衝突するまでの猶予時間を推定する推定部を有し、前記記憶部は、前記複数の危険度ランクの各々と、前記移動物の速度に応じた複数の速度ランクの各々と、前記猶予時間に応じた複数のレベルの各々と、前記回避制御と、を関連付けた前記制御情報を記憶し、前記推定部は、前記後進車両の推定経路と前記移動物の推定経路とが交差する交差位置と前記後進車両の位置との距離と、前記後進車両の速度とにより定まる時間を前記猶予時間として推定し、前記回避制御部は、前記進入領域の危険度ランク、前記速度ランク、及び推定された前記猶予時間に対応するレベルに関連付けられた回避制御を前記後進車両に実行させてもよい。
【0009】
前記制御情報の複数の前記回避制御の各々には、優先度が設定されており、前記領域特定部は、前記後進車両の周囲の複数の前記移動物の各々が進入する進入領域を推定し、前記回避制御部は、各移動物の前記進入領域の危険度ランクに関連付けられた複数の前記回避制御のうちの、最も優先度が高い回避制御を前記後進車両に実行させてもよい。
【0010】
前記複数の回避制御は、前記後進車両と前記移動物との衝突を回避可能な制動力を前記後進車両に発生させる制御であり、かつ最も高い優先度が付けられた制動制御と、前記移動物が前記後進車両に接近することを報知する喚起音を出力する制御であり、かつ最も低い優先度が付けられた喚起制御と、前記後進車両と前記移動物との衝突を報知する警報音を出力する制御であり、かつ前記最も高い優先度と前記最も低い優先度との間の優先度が付けられた警報制御とを含んでもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
11日前
個人
小型EVシステム
13日前
個人
眼科手術車
3か月前
個人
授乳用車両
3か月前
日本精機株式会社
ケース
19日前
日本精機株式会社
表示装置
26日前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
26日前
井関農機株式会社
作業車両
4か月前
日本精機株式会社
表示装置
4か月前
井関農機株式会社
作業車両
3か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
2か月前
個人
台車用車輪止め具
3か月前
個人
ブレーキシステム
24日前
株式会社松華
懸架装置
1か月前
個人
キャンピングトレーラー
4か月前
日本精機株式会社
車載表示装置
4か月前
個人
ステージカー
1か月前
個人
自動車ドア開度規制ベルト
12日前
個人
謝意シグナル装着車
4か月前
個人
自走式立体型洗車場
1か月前
横浜ゴム株式会社
タイヤ
23日前
日本精機株式会社
車両用表示装置
4か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
4か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用照明装置
2か月前
帝国繊維株式会社
作業車両
18日前
日本精機株式会社
車両用表示装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ