TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067331
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177243
出願日
2023-10-13
発明の名称
ダイレクトドライブモータ
出願人
シンフォニアテクノロジー株式会社
代理人
個人
主分類
H02K
7/08 20060101AFI20250417BHJP(電力の発電,変換,配電)
要約
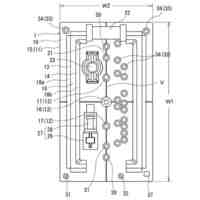
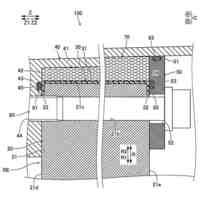
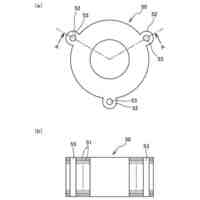
【課題】回転振れが極めて少なく、回転振れ精度の調整が容易となるダイレクトドライブモータを提供する。
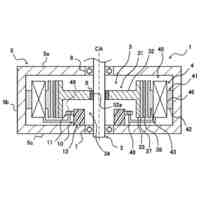
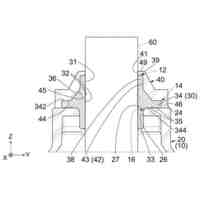
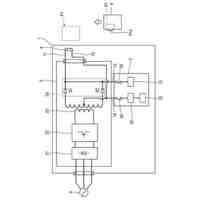
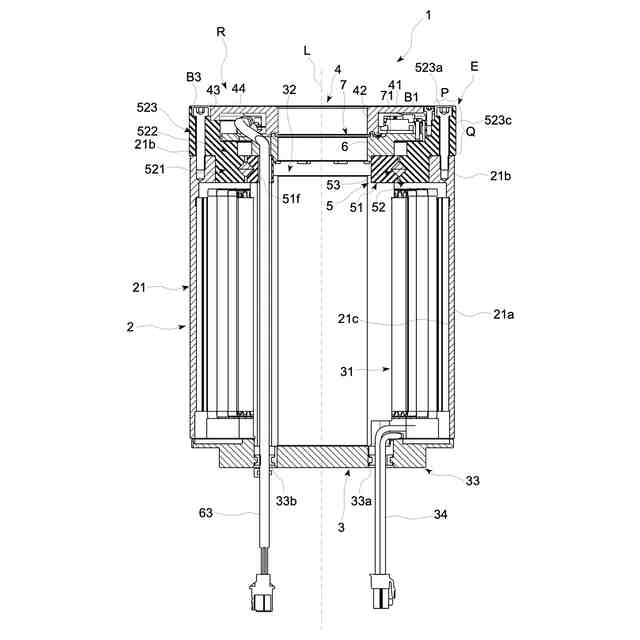
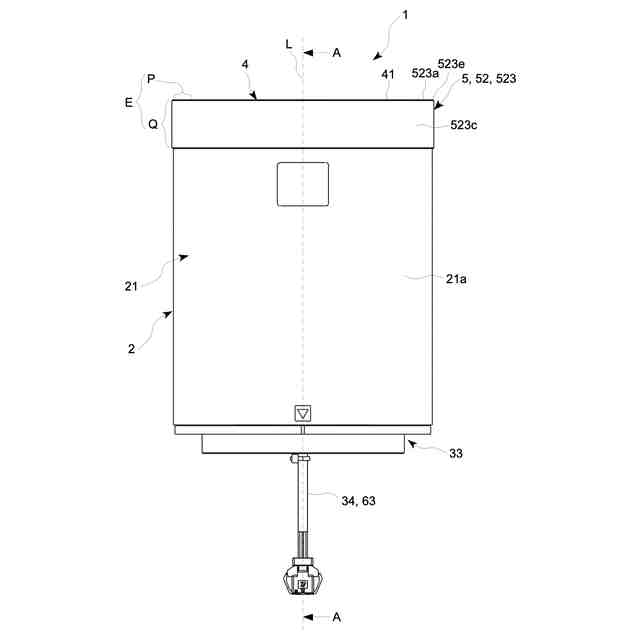
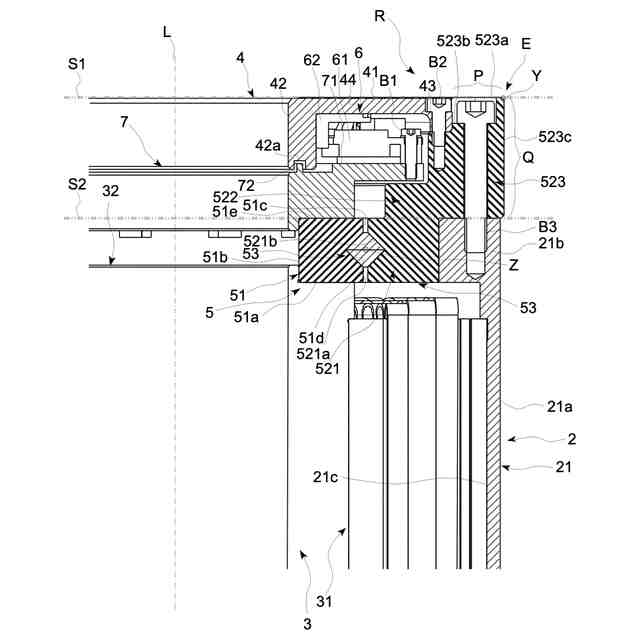
【解決手段】ダイレクトドライブモータ1を、固定部3と回転部(負荷側ブラケット)4との間に介在するクロスローラベアリング5において、内輪部51を固定部3に固定する一方、外輪部52を内輪部51とローラ53を挟んで対向配置される内方部521と、内方部521から中間部522を経て負荷側の外部に表出する位置まで連続的に一体に延在させた外方部523とから構成し、外方部523のみによって、負荷側端面周縁部Pから側周壁負荷側周縁部Qに至る負荷側エッジ部Eを構成したものとした。
【選択図】図3
特許請求の範囲
【請求項1】
円筒状のケーシングと、当該ケーシングの内部に配置される固定部と、所定の負荷を当接させて回転する回転部と、前記固定部と前記回転部との間に介在するクロスローラベアリングと、回転動作を検出するセンサ部とを備えたダイレクトドライブモータであって、
クロスローラベアリングを、前記ケーシングの内部に配置された内輪部と、前記ケーシングの内部において前記内輪部と対向する外輪部と、前記内輪部と前記外輪部との間に介在させた複数のローラとから構成し、
前記内輪部又前記外輪部の一方を他方に対向する内方部から負荷側に表出する外方部まで一体に延在させ、
前記内輪部又は前記外輪部の一方を前記固定部に固定するとともに他方を前記回転部に固定し、前記外方部によって負荷側端面周縁部から側周壁負荷側周縁部に亘る負荷側エッジ部を構成し、前記外方部の負荷側端面を前記回転部の負荷側を向く最外面である負荷載置面と一致させていることを特徴とするダイレクトドライブモータ。
続きを表示(約 450 文字)
【請求項2】
前記内輪部を前記固定部に固定するとともに、前記外輪部を前記回転部に固定し、前記外方部の最外側周面により前記側周壁負荷側周縁部の外周面を構成している請求項1に記載のダイレクトドライブモータ。
【請求項3】
前記回転部の前記負荷載置面と前記外方部の前記負荷側端面を一様な平坦に形成するとともに、前記外方部の外側周面の全体を一様な円筒周面に形成している請求項2に記載のダイレクトドライブモータ。
【請求項4】
前記外方部と前記ケーシング、及び前記外方部と前記回転部を、それぞれ前記回転部の回転軸と平行な方向に挿入されるボルトにより締結している請求項3に記載のダイレクトドライブモータ。
【請求項5】
前記センサ部を、前記回転部の回転軸と直交し前記負荷載置面を含む第1平面と、前記回転部の回転軸と直交し前記外方部の前記最外側周面の下端を含む第2平面とによって包囲される空間に配置している請求項1乃至4のいずれかに記載のダイレクトドライブモータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、クロスローラベアリングを備えたダイレクトドライブモータに関するものである。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
電動機の回転力を減速機やベルト、プーリ等のメカ機構を介さずに、直接、駆動対象に伝達する方式又は機構として、ダイレクトドライブモータが用いられている。ダイレクトドライブモータは、減速機構の摩擦による損失を最小限にすることが可能であるため高効率であり、シンプルな機構で接触や振動をおこす部品が減るため機械的な騒音を無くすことが可能であって低騒音であり、減速機が不要であるためバックラッシレスにより高精度・高応答であるといった特徴があり、信頼性の高さやメンテナンスのし易さ、省スペース性が高いといった利点から、様々な産業機器に用いられている。
【0003】
ダイレクトドライブモータの構造は、固定部(ステータ)、回転部(ロータ)、軸受、回転位置検出用センサ(エンコーダ)の概ね4つのパーツで構成されており、軸受にはクロスローラベアリングが採用されることが多い。クロスローラベアリングは、1つの軸受けでラジアル荷重、アキシャル荷重、モーメント荷重を受けることができ、薄型化と大幅な剛性向上に寄与している。さらに、クロスローラベアリングでは、ベアリング間の隙間が調整できる構造であるため、予圧を与えることもでき、高精度な回転を得ることができる。
【0004】
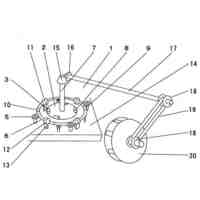
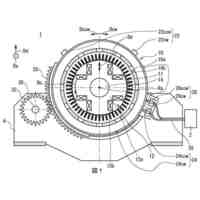
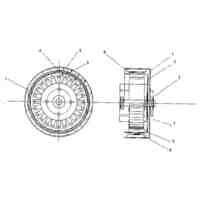
ダイレクトドライブモータに適用されるクロスローラベアリングとしては、ロータ側又はステータ側の一方側に固定された円環状の内輪部と、他方側に固定された円環状の外輪部とを、同心の二重構造とし、内輪部と外輪部との間にローラを設けたユニット構成とし、このクロスローラベアリングのユニットをケーシングの内部においてロータ側及びステータ側の各部材で取り囲むように配置したものが一般的である(例えば、特許文献1、図4参照)。このような構成以外にも、ハーモニック減速機を備えた回転電機(ACサーボモータ)に適用されるクロスローラベアリングとして、ハウジングの減速機部(ハーモニック減速機)に固定された負荷側ブラケットを外輪部とし、この負荷側ブラケットの内周部に固定されたサーキュラスプラインと噛み合うフレクスプラインに固定された出力軸を内輪部とし、負荷側ブラケットと出力軸との間にローラ(ころ部材)を介在配置した構成のものも考えられている(例えば、特許文献2、図1参照)。
【先行技術文献】
【特許文献】
【0005】
特開2016-159400
特開2011-205769
【発明の概要】
【発明が解決しようとする課題】
【0006】
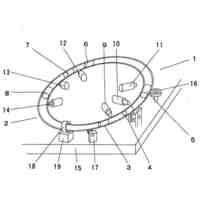
近年では、ダイレクトドライブモータが扱うワークの高精細化に伴い、ダイレクトドライブモータ自体の精度、特にクロスローラベアリング及びその周辺の構造において、モータの回転軸に対する振れ(回転振れ)精度の向上が求められてきている。回転振れは、ダイレクトドライブモータの負荷側において、負荷側端面周縁部から側周壁負荷側周縁部に亘る負荷側エッジ部の振れとして、回転軸と平行な方向の振れ(負荷側端面の振れであり、以下、「面振れ」という)と、回転軸と直交する方向の振れ(側周壁負荷側周縁部の負荷側端面と平行な方向の振れであり、以下、「軸振れ」という)によって規定される。回転振れ精度は、部品間の隙間勘合による組立誤差の影響や、部品単体の平行度や同軸度等の加工精度に左右されるため、これらの誤差の極小化や加工精度の高精度化が要求される。特に、クロスローラベアリングは負荷に対する回転を保持し荷重を受ける部品であるため、その加工精度の出来栄えと、ダイレクトドライブモータ内での組立精度は、回転振れ精度を左右する主な要因である。
【0007】
特許文献1に示されるような一般的なクロスローラベアリングを備えたダイレクトドライブモータでは、クロスローラベアリングが他の部品に取り囲まれた状態でモータの内部に組み込まれた構成を有しているため、クロスローラベアリングやその周辺の各部品の加工精度を高めたとしても、部品同士の組立における積み上げ公差は必然的に大きくなり、高度な回転振れ精度を実現するのは困難である。数台レベルの試作品や製品の製造ならば、組立後のダイレクトドライブモータに通電して実際に作動させた状態で回転振れを修正する追加工を行うことも考えられるが、大量生産の現場においてはこのような追加工は非現実的である。
【0008】
また、特許文献2に示された回転電機では、回転電機全体の負荷側の端面を外輪部となる負荷側ブラケットの端面により構成しているが、その近傍において、内輪部となる出力軸の端面が負荷側ブラケットの端面と平行となるように設けられており、負荷側ブラケットの端面と出力軸の端面との間には段差が形成されている。そのため、回転振れ精度のうち特に面振れの精度については、負荷側ブラケットの端面と出力軸の端面の両方の加工精度に依るものとなるが、これらの加工精度を完全に一致させることは技術的に難しく、面振れ精度の基準面が定まらず、面振れ精度を安定的に設定することは困難である。また、外輪部の一部はケーシングの周壁と面一となるように設けられているが、ケーシングの周壁と平行でありそれよりも外方に突出した部位や凹陥した部位が負荷側近傍に形成されているため、これらの平行な面の加工精度を完全に一致させることも技術的に難しく、軸振れ精度を安定的に設定することは困難である。さらに、このアウターロータ型のモータの負荷側において、回転軸と直交する負荷方向の最外面と、回転軸と平行な周壁を構成する最外面とが交差しておらず、共通の負荷側エッジ部を形成していないことから、回転振れ(面振れ及び軸振れ)精度の基準点が定まらず、高い回転振れ精度を実現するための設計が難しい。さらにまた、この回転電機は、内輪部となる出力軸及び外輪部となる負荷側ブラケットは、可撓性のあるフレクスプラインを含むハーモニック減速機と接触した構造であり、その回転振れ精度はクロスローラベアリングとハーモニック減速機の両方の加工精度にも依存するため、両者の加工精度を一致させることの困難性に鑑みれば、高い回転振れ精度を期待することはできない。そもそも、特許文献2に開示された回転電機は、回転子ヨークと回転軸の取付剛性の向上と小型化を図ることを目的とした構成を有するものであり、当初から回転振れ精度を向上するための構成としては不向きであるといえる。
【0009】
本発明は、このような点に着目したものであって、クロスローラベアリングの加工精度に基づいて極めて高い回転振れ精度を実現することができるダイレクトドライブモータを提供することを目的とするものである。
【課題を解決するための手段】
【0010】
すなわち本発明は、円筒状のケーシングと、このケーシングの内部に配置される固定部と、所定の負荷を当接させて回転する回転部と、固定部と回転部との間に介在するクロスローラベアリングと、回転動作を検出するセンサ部を備えたダイレクトドライブモータであって、クロスローラベアリングを、ケーシングの内部に配置された内輪部と、ケーシングの内部において内輪部と対向する外輪部と、内輪部と外輪部との間に介在させた複数のローラとから構成し、内輪部又外輪部の一方を他方に対向する内方部から負荷側に表出する外方部まで一体に延在させ、内輪部又は外輪部の一方を固定部に固定するとともに他方を回転部に固定し、外方部によって負荷側端面周縁部から側周壁負荷側周縁部に亘る負荷側エッジ部を構成し、外方部の負荷側端面を回転部の負荷側を向く最外面である負荷接続面と一致させていることを特徴とするものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
18日前
個人
発電機
14日前
ニデック株式会社
モータ
10日前
個人
ファスナー式コード束ね
1か月前
個人
高電荷低電位電荷搬送体
1か月前
株式会社豊田自動織機
回転電機
1か月前
西芝電機株式会社
回転電機
今日
未来工業株式会社
ゲージ
1か月前
株式会社アイシン
車両用駆動装置
26日前
株式会社シマノ
電力供給装置
19日前
富士電機株式会社
半導体装置
18日前
株式会社アイドゥス企画
負荷追従電動モータ
4日前
株式会社浅羽製作所
通線用先端誘導具
25日前
株式会社ダイヘン
電圧調整装置
10日前
ダイハツ工業株式会社
モータ製造装置
3日前
株式会社ダイヘン
電力システム
20日前
トヨタ自動車株式会社
蓄電池制御装置
20日前
株式会社ダイヘン
蓄電池システム
25日前
高周波熱錬株式会社
電源装置
1か月前
高周波熱錬株式会社
電源装置
1か月前
コーセル株式会社
スイッチング電源装置
1か月前
株式会社アイシン
回転電機用ステータ製造方法
5日前
株式会社アイシン
回転電機用ステータ製造方法
5日前
株式会社アイドゥス企画
磁力トルクコンバータ
4日前
日本航空電子工業株式会社
シール構造体
28日前
株式会社ゲットクリーンエナジー
発電機
11日前
トヨタ紡織株式会社
磁石挿入装置
10日前
トヨタ自動車株式会社
充電制御装置
18日前
GX株式会社
可搬式太陽光発電用電源装置
18日前
株式会社ミツバ
端子ユニット
1か月前
キヤノン株式会社
電源装置、画像形成装置
19日前
株式会社ダイヘン
無線給電システム
10日前
矢崎総業株式会社
グロメット
28日前
ニデック株式会社
ステータ、モータ及びドローン
1か月前
シンフォニアテクノロジー株式会社
充電装置
19日前
株式会社ミツバ
モータ制御装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ