TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071737
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023191169
出願日
2023-10-23
発明の名称
負荷追従電動モータ
出願人
株式会社アイドゥス企画
代理人
主分類
H02P
29/00 20160101AFI20250428BHJP(電力の発電,変換,配電)
要約
【課題】ロボットアームの各動作モードに求められる動きを、モータ単独で制御する。
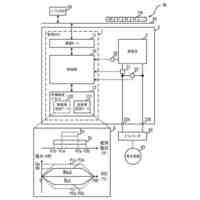
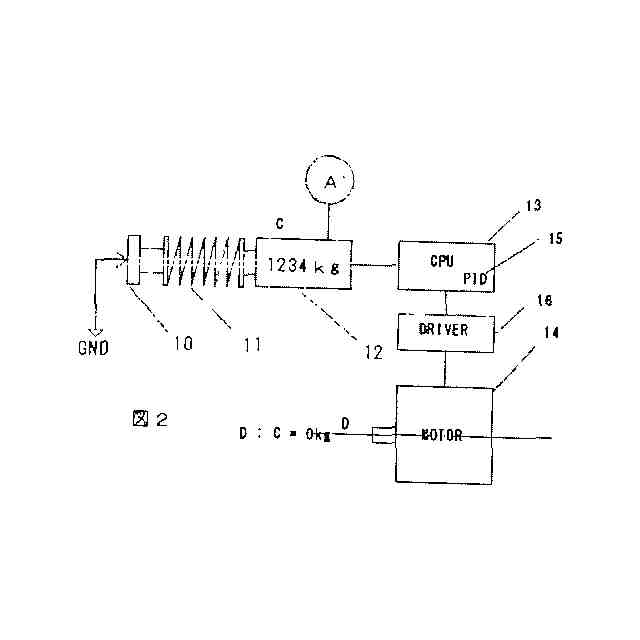
【解決手段】一次回転軸と2次回転軸をスプリングと荷重センサで連結して追従トルクセンサとし、前記追従トルクセンサーを回転軸とロータの接合部分とモータ本体と架台の取付部に設置する。追従トルクセンサーの荷重値をコンピュータ(13)で測定し、PIDデータ(15)に沿ってドライバ(16)により、モータのステータを外部トルクと打ち消す方向に動作させ、モータのロータを回転させる。
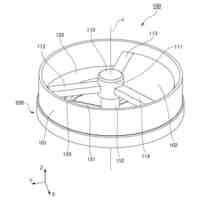
【選択図】図2
特許請求の範囲
【請求項1】
ダンパとセンサを組み合わせた回転トルクセンサ等を使用して、回転軸に外部から掛かるトルクを測定し回転制御を行う、負荷追従電動モータ。
続きを表示(約 440 文字)
【請求項2】
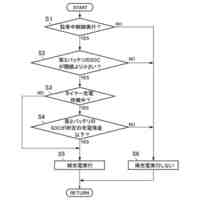
受動制御、回転軸が外部から受けるにトルクが、内部設定した目標トルク値を上回ると、外部から受けるトルクを減少させる方向に、PID制御を行い、目標トルクを維持する、負荷追従電動モータ。
【請求項3】
能動制御、回転軸が外部に与えるトルクが、内部設定した目標トルク値を上回ると、外部トルクに与えるトルクを減少させる方向に、PID制御を行い、目標トルクを維持する、負荷追従電動モータ。
【請求項4】
反復動作を選択すると、受動制御、能動制御動作において、ゼロトルク付近と成った場合、制御を開始した位置まで逆回転して停止する、負荷追従電動モータ。
【請求項5】
回転軸にタッチセンサを備え、負荷接続の有無を感知して制御を行う、負荷追従モータ。
【請求項6】
AIを使用、負荷の有無、受動動作、能動動作、反復動作並びに、外部トルクの変化に適応して内部設定値を自動更新する等、自律的に制御を行う、負荷追従モータ。
発明の詳細な説明
【技術分野】
【0001】
回転軸が外部に与える圧力(能動トルク)、回転軸が外部から受ける張力(受動トルク)を、ダンパ+複数方向のセンサの組合せで測定し、小型コンピュータでモータで、受動トルク、能動トルクを、PID設定値に沿って制御、目標トルク値を維持します。
反復動作時は、目標トルクに到達した後、ゼロ付近トルクと成った場合、逆回転して制御を開始した位置まで戻り停止する。
タッチセンサを備え、外部負荷源が接続されている時だけ動作する。
続きを表示(約 1,300 文字)
【技術背景】
【0002】
ロボットアームを人間に近づける場合、自分から動作する能動動作、相手に合わせる受動動作、自然の位置に戻る動作、物に触れた時に動作を開始する、この動作を、モータ単独で実現させます。
【発明の概要】
【】
【発明が解消しようとする課題】
【0003】
停止状態を含めてモータの動作とし、停止状態、動作状態から張力、圧力をモータ自体で測定し、単独で制御出来れば、ロボット制御が極めて簡単になります。
【課題を解決する為の手段】
【0004】
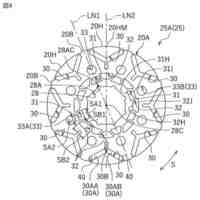
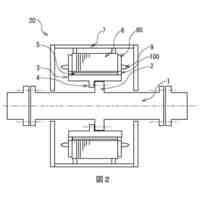
モータの回転軸に掛かる、外部トルクを測定する為の、ダンパ+センサを、回転軸の途中、ロータと回転軸の接続部部、モータ本体と架台に取付けます。
衝突等、突発的な過大トルクをダンパで吸収、荷重センサで外部トルクを測定、小型コンピュータで、停止中は受動動作、回転中は能動制御、反復動作を選択すると、制御を開始した位置まで逆回転して停止します。
タッチセンサで、負荷の有無を検出、無負荷なら制御を停止します。
【発明の効果】
【0005】
回転軸に外部から受ける、正方向負方向の外部トルクに追従し、PID設定値に沿って、目標トルクを維持、外部トルクが変化する場合は、AIによって、内部設定値を自動更新する事で、直径が変化するロール材の減反、巻き取り、油圧ダンパ、油圧ブレーキの置き換えが出来ます。
【図面の簡単な説明】
【0006】
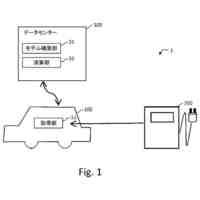
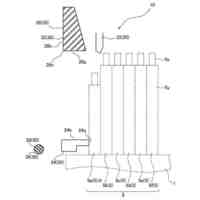
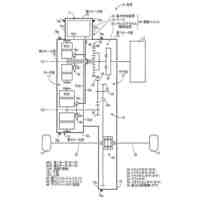
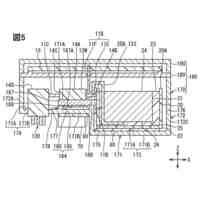
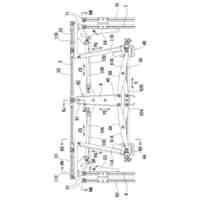
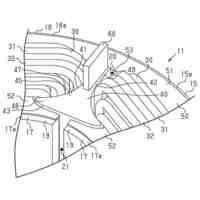
この出願に係る発明の第一の実施の形態を示す構成図である。
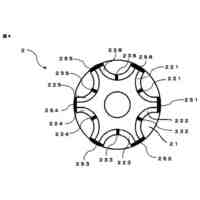
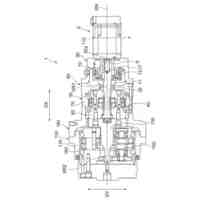
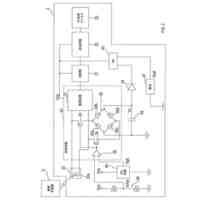
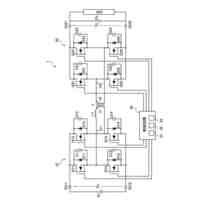
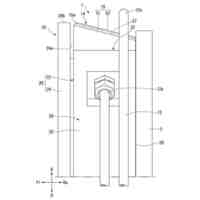
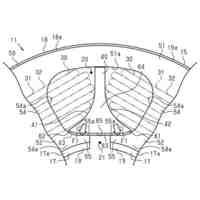
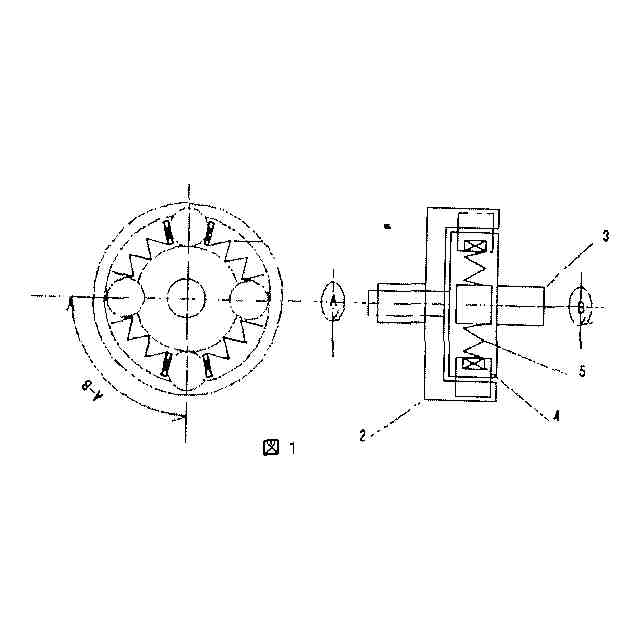
この出願に係る発明の第一の実施の形態を示す原理図である。
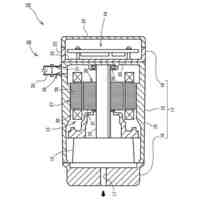
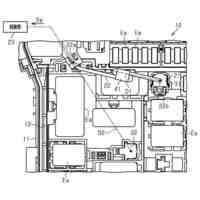
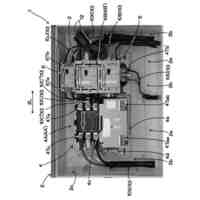
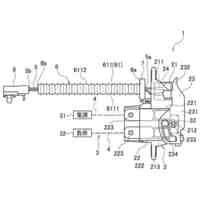
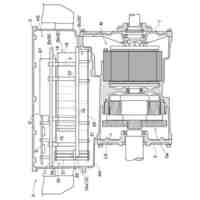
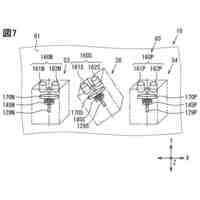
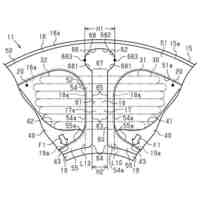
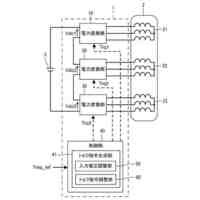
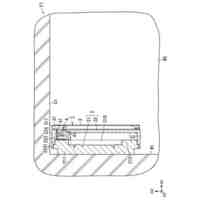
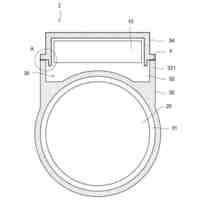
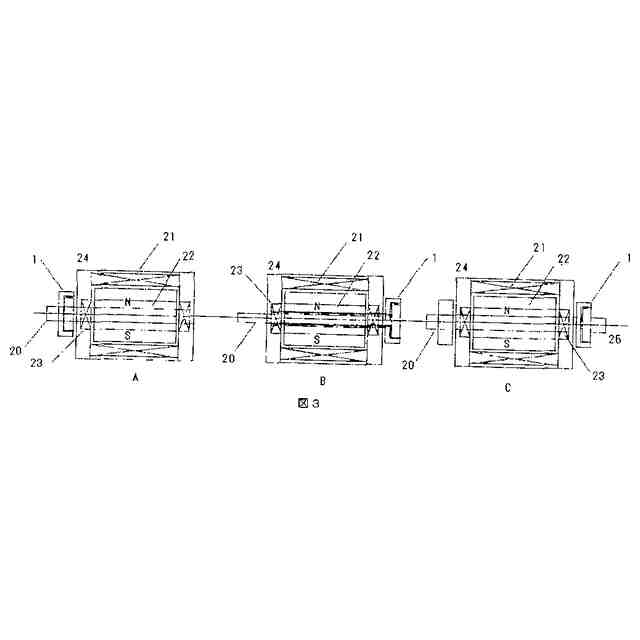
この出願に係る発明の第一の実施の形態を示す実装図である。
【発明を実施するための形態】
【0007】
一次回転軸(2)と2次回転軸(3)をスプリング(5)と荷重センサ(4)で連結、回転軸(20)、ロータ(22)との接合部分、モータ本体(24)と架台(25)の取付部分を設置します。
追従トルクセンサー(1)、制御コンピュータ(13)、モータ駆動回路(16)と、モータ(14)で構成する。
【符号の説明】
【0008】
1 追従トルクセンサ
2 1次回転軸
3 2次回転軸
4 荷重センサ
5 スプリング
10 タッチセンサ
11 スプリング
12 荷重計
13 コンピュータ
14 モータ
15 PIDデータ
16 ドライバ
20 回転軸
21 ステータ
22 ロータ
23 ベアリング
24 モータ本体
25 架台
この特許をJ-PlatPatで参照する
関連特許
マグネデザイン株式会社
ロータ
11日前
トヨタ自動車株式会社
予測方法
5日前
株式会社豊田自動織機
モータ冷却装置
11日前
株式会社ダイヘン
充電装置
13日前
住友電装株式会社
電気接続箱
6日前
住友電装株式会社
電気接続箱
6日前
トヨタ自動車株式会社
電池制御装置
今日
ダイハツ工業株式会社
曲げ加工装置
7日前
株式会社ダイヘン
電圧調整装置
13日前
トヨタ自動車株式会社
駆動ユニット
3日前
トヨタ自動車株式会社
電磁鋼板の成形方法
12日前
株式会社力電
配線スペース低減型の切替盤
10日前
ナブテスコ株式会社
駆動装置
今日
株式会社デンソー
携帯機
11日前
矢崎総業株式会社
電線保護構造
13日前
トヨタ自動車株式会社
ステータ
7日前
株式会社デンソー
電力変換装置
12日前
株式会社デンソー
電力変換装置
12日前
株式会社明電舎
ドローン
13日前
株式会社アイシン
電力変換装置
5日前
トヨタ自動車株式会社
車両の制御装置
10日前
株式会社デンソー
機器モジュール
4日前
晶科儲能科技有限公司
総合キャビネット
7日前
株式会社アイシン
車両用駆動装置
6日前
ダイヤゼブラ電機株式会社
DC-DCコンバータ
6日前
GX株式会社
太陽光発電装置及び太陽光発電方法
6日前
河村電器産業株式会社
充電器
13日前
オムロン株式会社
充電装置
14日前
株式会社豊田自動織機
回転電機のステータ
今日
株式会社エフ・シー・シー
モータの回転子
7日前
株式会社豊田自動織機
回転電機のステータ
今日
株式会社豊田自動織機
回転電機のステータ
今日
シンフォニアテクノロジー株式会社
電力変換装置
11日前
西芝電機株式会社
軸発電機の回転子鉄心の支持方法
5日前
パナソニック株式会社
分電盤
7日前
日産自動車株式会社
駆動装置
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ