TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067295
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177188
出願日
2023-10-13
発明の名称
レーダ装置および物体位置検出方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G01S
7/40 20060101AFI20250417BHJP(測定;試験)
要約
【課題】球面波による位相回転の影響が抑制されたレーダ装置を提供する。
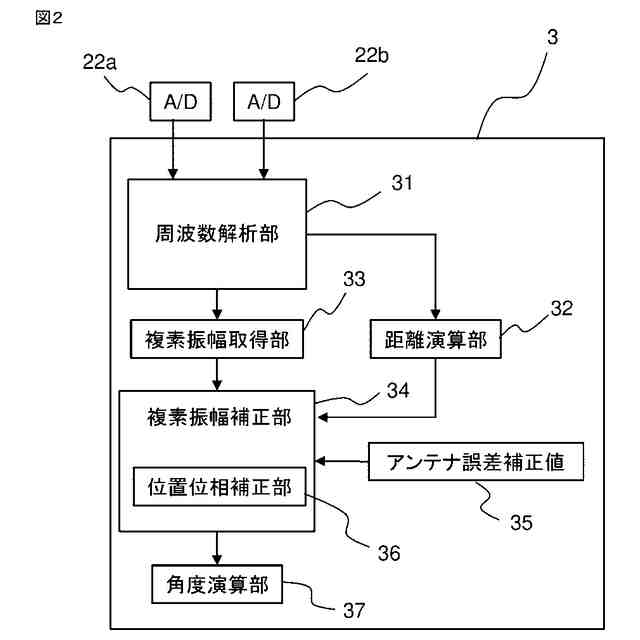
【解決手段】送信アンテナと、前記送信アンテナから放射された送信波が物体により反射された反射波を受信信号として受信する複数の受信アンテナと、受信アンテナで受信した受信信号を解析して物体の位置を算出する信号処理器とを備え、信号処理器は、受信信号を解析して得られる複素スペクトラムの振幅ピークから物体の距離を演算する距離演算部と、振幅ピークにおける複素振幅を取得する複素振幅取得部と、複素振幅を、予め記憶されているアンテナ誤差補正値により補正し、補正された複素振幅の位相を物体の位置に基づいてさらに補正して角度演算用複素振幅を演算する位置位相補正部と、角度演算用複素振幅から、反射波の到来方向である物体の角度を演算する角度演算部と、を備えるよう構成した。
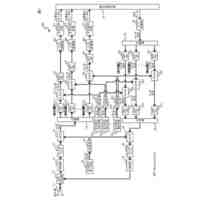
【選択図】図2
特許請求の範囲
【請求項1】
送信アンテナと、前記送信アンテナから放射された送信波が物体により反射された反射波を受信信号として受信する複数の受信アンテナと、前記受信アンテナで受信した前記受信信号を解析して前記物体の位置を算出する信号処理器とを備えたレーダ装置において、
前記信号処理器は、
前記受信信号を解析して得られる複素スペクトラムの振幅ピークから前記物体の距離を演算する距離演算部と、
前記振幅ピークにおける複素振幅を取得する複素振幅取得部と、
取得した前記複素振幅を、予め記憶されているアンテナ誤差補正値により補正し、補正された前記複素振幅の位相を前記物体の位置に基づいてさらに補正して角度演算用複素振幅を演算する位置位相補正部と、
前記角度演算用複素振幅から、前記反射波の到来方向である物体の角度を演算する角度演算部と、
を備えるレーダ装置。
続きを表示(約 1,200 文字)
【請求項2】
前記アンテナ誤差補正値は、既知の位置に設置された参照反射源による反射波のデータから生成した補正値である請求項1に記載のレーダ装置。
【請求項3】
前記アンテナ誤差補正値は、前記参照反射源による反射波の受信信号を解析して得られる複素スペクトラムの振幅ピークにおける複素振幅を、前記送信アンテナおよび前記受信アンテナから見た前記参照反射源が同角度にあるとみなした場合に生じる位相回転量を用いて補正し、当該補正後の複素振幅を用いて演算して求められる請求項2に記載のレーダ装置。
【請求項4】
前記角度演算用複素振幅は、前記物体の距離、および補正演算用角度を用いて演算される請求項1から3のいずれか1項に記載のレーダ装置。
【請求項5】
前記信号処理器は、前記物体の位置を算出する演算を一定周期あるいは可変周期毎に繰り返し行い、前記補正演算用角度は、前周期または前周期よりも前の周期に演算して求めた前記物体の角度に基づいて設定される請求項4に記載のレーダ装置。
【請求項6】
前記補正演算用角度は、当該レーダ装置の基準点に対して前記送信アンテナの放射の基準方向の角度に設定される請求項4に記載のレーダ装置。
【請求項7】
送信アンテナと、前記送信アンテナから放射された送信波が物体により反射された反射波を受信信号として受信する複数の受信アンテナと、前記受信アンテナで受信した前記受信信号を解析して前記物体の位置を算出するレーダ装置における物体位置検出方法であって、
前記受信信号を解析して得られる複素スペクトラムの振幅ピークから前記物体の距離を演算するステップ、
前記振幅ピークにおける複素振幅を取得するステップ、
取得した前記複素振幅を、予め記憶されているアンテナ誤差補正値により補正し、補正された前記複素振幅の位相を前記物体の位置に基づいて補正して角度演算用複素振幅を演算し、
演算された前記角度演算用複素振幅から、前記反射波の到来方向である物体の角度を演算するステップ
を備えた物体位置検出方法。
【請求項8】
前記アンテナ誤差補正値は、既知の位置に設置された参照反射源による反射波のデータから生成した補正値である請求項7に記載の物体位置検出方法。
【請求項9】
前記アンテナ誤差補正値は、前記参照反射源による反射波の受信信号を解析して得られる複素スペクトラムの振幅ピークにおける複素振幅を、前記送信アンテナおよび前記受信アンテナから見た前記参照反射源が同角度とみなした場合に生じる位相回転量を用いて補正し、当該補正後の複素振幅を用いて演算して求められる請求項8に記載の物体位置検出方法。
【請求項10】
前記角度演算用複素振幅は、前記物体の距離、および補正演算用角度を用いて演算される請求項7から9のいずれか1項に記載の物体位置検出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダ装置および物体位置検出方法に関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
自動車の衝突防止、あるいは自動運転のために、前方の物体など、自車の周囲の物体の検出に用いるセンサとして、ミリ波などの高周波を用いたレーダ装置がある。このレーダ装置は、送信された高周波が検出物体から反射された反射波を受信して、受信波を解析することにより、物体までの距離、相対速度、あるいは物体の方向を検出するものである。距離および相対速度は、反射波の強度ピークにより検出でき、方向は、複数の受信アンテナにより受信された受信波の位相差から検出することができる。位相差は、複数の受信アンテナの相対位置、アンテナ間の電磁的な結合、また特に受信アンテナの近傍の構成物、自動車の場合、例えばレーダ装置がバンパーの内側に設置されていればバンパー、の影響を受ける。このため、レーダ装置が装着された状態で装置毎に校正のための装置誤差補正用のデータを取得し、装置毎に誤差補正用のデータを記憶させ、実使用時にこのデータにより補正して、角度補正を行って、物体の方向、すなわち反射波の到来方向の検出を行う。(例えば特許文献1参照)
【先行技術文献】
【特許文献】
【0003】
特表2017-513027号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
誤差補正用のデータを取得する際、レーダ装置からそれほど遠くない距離に参照反射源を設置し、この参照反射源からの反射波を解析して誤差補正用のデータを得る。この場合、レーダ装置と参照反射源の距離が近いため、誤差補正用データに球面波による位相回転が含まれる。この球面波による位相回転を含んだ誤差補正用データを用いてアンテナ誤差を補正すると、実際の検出時に、誤差補正用データを取得したときの参照反射源の位置と異なる位置にある物体の角度演算値に誤差が含まれてしまう。
【0005】
本開示は、上記の課題を解決するものであり、球面波による位相回転が原因の誤差を抑制し、より精度の高い角度演算値が得られるレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示のレーダ装置は、送信アンテナと、前記送信アンテナから放射された送信波が物体により反射された反射波を受信信号として受信する複数の受信アンテナと、前記受信アンテナで受信した前記受信信号を解析して前記物体の位置を算出する信号処理器とを備えたレーダ装置において、前記信号処理器は、前記受信信号を解析して得られる複素スペクトラムの振幅ピークから前記物体の距離を演算する距離演算部と、前記振幅ピークにおける複素振幅を取得する複素振幅取得部と、取得した前記複素振幅を、予め記憶されているアンテナ誤差補正値により補正し、補正された前記複素振幅の位相を前記物体の位置に基づいてさらに補正して角度演算用複素振幅を演算する位置位相補正部と、前記角度演算用複素振幅から、前記反射波の到来方向である物体の角度を演算する角度演算部と、を備えるよう構成されたものである。
【発明の効果】
【0007】
本開示のレーダ装置によれば、球面波による位相回転が原因の誤差を抑制し、より精度の高い角度演算値が得られるレーダ装置を提供できる。
【図面の簡単な説明】
【0008】
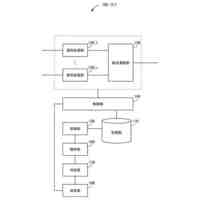
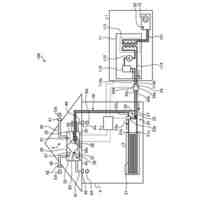
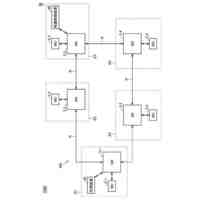
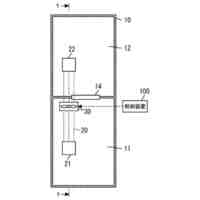
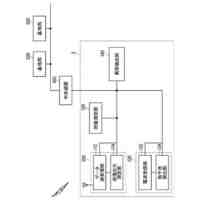
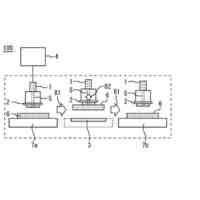
実施の形態1によるレーダ装置の構成を示すブロック図である。
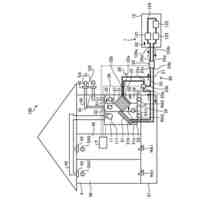
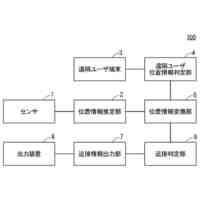
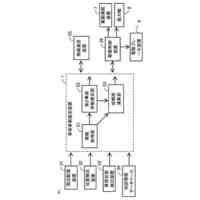
実施の形態1によるレーダ装置の信号処理器の内部構造を示すブロック図である。
図3A、図3Bおよび図3Cは、実施の形態1によるレーダ装置の、球面波による位相回転を説明するための図である。
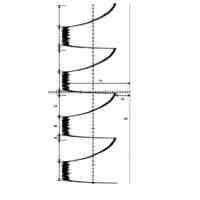
図4Aおよび図4Bは、比較例の角度演算値の、物体の距離による依存性を示す線図であり、図4Aは方位角の依存性、図4Bは仰俯角の依存性を示している。
実施の形態1による物体位置検出方法の手順を示すフロー図である。
球面波による位相回転を説明するための概念図である。
図7Aおよび図7Bは、アンテナ誤差のみを補正した場合の角度演算値の、物体の距離による依存性を示す線図であり、図7Aは方位角の依存性、図7Bは仰俯角の依存性を示している。図である。
図8Aおよび図8Bは、実施の形態1によるレーダ装置の、アンテナ誤差および球面波による位相回転を補正した場合の角度演算値の、物体の距離による依存性を示す線図であり、図8Aは方位角の依存性、図8Bは仰俯角の依存性を示している。
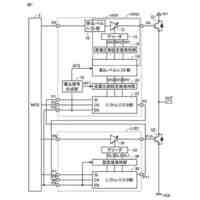
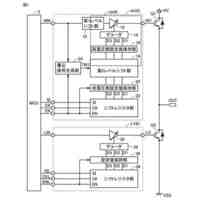
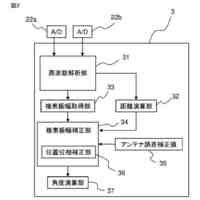
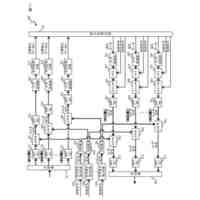
実施の形態1のレーダ装置の信号処理器の具体的な構成の一例を示すブロック図である。
【発明を実施するための形態】
【0009】
実施の形態1.
高周波を用いたレーダの方式には、FM-CW(Frequency Modulated Continuous Wave)方式、FCM(Fast Chirp Modulation)方式、パルス・ドップラー方式などがあり、本開示の技術は、球面波による位相回転の誤差を補正する技術であるので、いずれの方式にも適用可能である。以下では、FCM方式を例にして説明する。
【0010】
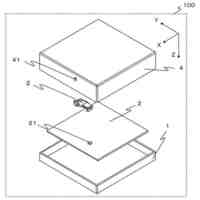
図1は、実施の形態1によるレーダ装置の構成を示すブロック図である。レーダ装置は、送信アンテナと受信アンテナを備えている。図1では、簡単のため、1個の送信アンテナktと、受信アンテナkr1および受信アンテナkr2の2個の受信アンテナを備えたレーダ装置を例として示している。本開示が対象のレーダ装置では、受信アンテナは2個以上、すなわち複数の受信アンテナが必要である。なお、複数の送信アンテナを使用する場合は、受信信号は送信アンテナ数と受信アンテナ数の積で表される数だけ取得することができる。この技術はMIMO(Multiple Input Multiple Output: マルチ入力マルチ出力)技術と呼ばれ、MIMO技術により形成される仮想受信アンテナも単に「受信アンテナ」と称する。以下の実施の形態では、「受信アンテナ」は実配置された「受信アンテナ」に限らず「仮想受信アンテナ」を含んでいてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
20日前
三菱電機株式会社
放電装置
今日
三菱電機株式会社
発光装置
今日
三菱電機株式会社
半導体装置
8日前
三菱電機株式会社
光通信装置
今日
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
半導体装置
17日前
三菱電機株式会社
半導体装置
7日前
三菱電機株式会社
半導体製造装置
10日前
三菱電機株式会社
換気空調システム
16日前
三菱電機株式会社
換気空調システム
16日前
三菱電機株式会社
換気空調システム
16日前
三菱電機株式会社
半導体モジュール
7日前
三菱電機株式会社
半導体モジュール
20日前
三菱電機株式会社
保護リレーシステム
7日前
三菱電機株式会社
移載装置及び吸着方法
17日前
三菱電機株式会社
半導体チップ及び半導体装置
17日前
三菱電機株式会社
拡管工具および管の拡管方法
7日前
三菱電機株式会社
トルク締め個所検出システム
20日前
三菱電機株式会社
送風システム及び空調システム
1日前
三菱電機株式会社
送風システム及び空調システム
1日前
三菱電機株式会社
バーチャルオフィス支援システム
8日前
三菱電機株式会社
ベーパーチャンバー及び冷却装置
15日前
三菱電機株式会社
レーダ装置および物体位置検出方法
今日
三菱電機株式会社
漏油画像生成装置および漏油検知装置
17日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
10日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
10日前
三菱電機株式会社
移動体制御装置および移動体制御方法
今日
三菱電機株式会社
導波管アンテナおよびレーダシステム
今日
三菱電機株式会社
車両挙動推定装置及び車両挙動推定方法
14日前
三菱電機株式会社
アンテナモジュールおよびアンテナ装置
17日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
15日前
三菱電機株式会社
異常検出システム、および、異常検出方法
2日前
三菱電機株式会社
半導体装置、及び、半導体装置の製造方法
15日前
三菱電機株式会社
半導体製造装置および半導体装置の製造方法
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ