TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059196
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169045
出願日
2023-09-29
発明の名称
車両挙動推定装置及び車両挙動推定方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20250403BHJP(信号)
要約
【課題】第1車両の周囲に存在する第2車両の車両挙動を推定する際に、推定の困難度による推定信頼度の情報を得ることができる車両挙動推定装置及び車両挙動推定方法を提供する。
【解決手段】第1車両が走行する道路情報、及び第2車両の情報を取得し、少なくとも第2車両の情報と道路情報とに基づいて、第2車両の車両挙動を推定し、第1車両の情報、第2車両の情報、及び前記道路情報の内、少なくとも1つの情報に基づいて、第2車両の車両挙動の推定困難度による、第2車両の車両挙動の推定信頼度を演算する車両挙動推定装置。
【選択図】図1
特許請求の範囲
【請求項1】
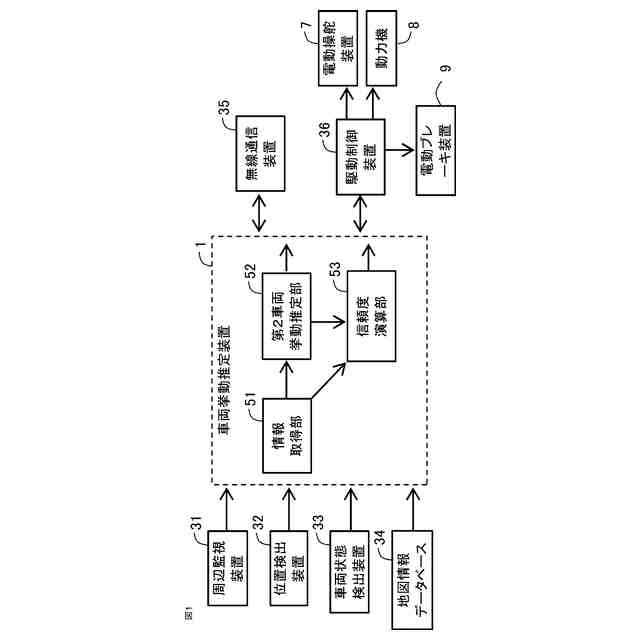
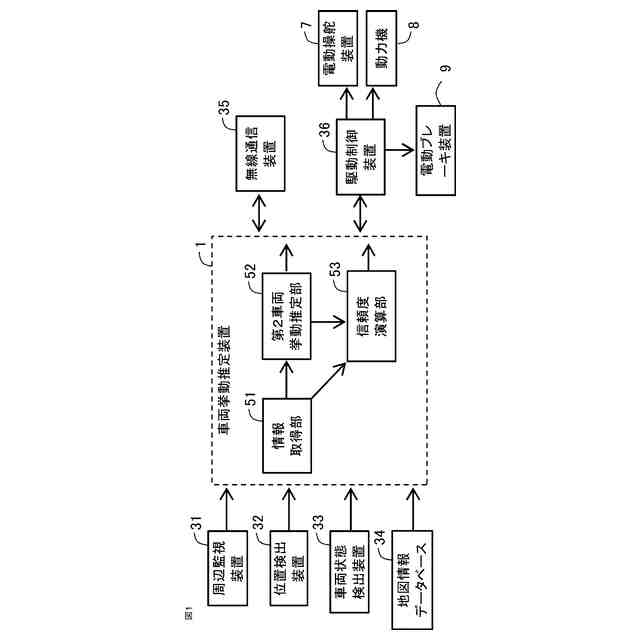
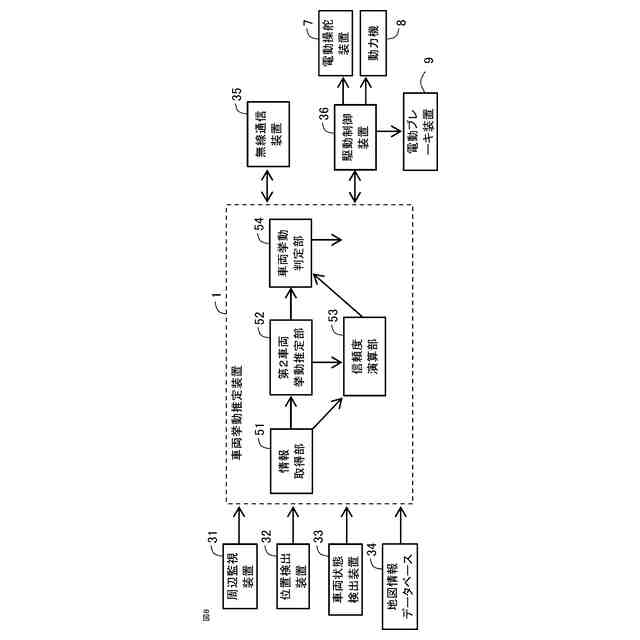
第1車両が走行する道路情報、及び第1車両の周辺に存在する周辺車両の情報を取得する情報取得部と、
前記周辺車両から車両挙動の推定対象である第2車両を設定し、少なくとも第2車両の情報と前記道路情報とに基づいて、第2車両の車両挙動を推定する第2車両挙動推定部と、
第1車両の情報、第2車両の情報、及び前記道路情報の内、少なくとも1つの情報に基づいて、第2車両の車両挙動の推定困難度による、第2車両の車両挙動の推定信頼度を演算する信頼度演算部と、
を備えた車両挙動推定装置。
続きを表示(約 1,600 文字)
【請求項2】
前記第2車両挙動推定部は、第2車両の情報と前記道路情報に基づいて、第2車両の横移動に関する情報を演算し、前記横移動に関する情報に基づいて、第2車両の前記車両挙動として、第2車両の横移動による車線変更の確率を推定する請求項1に記載の車両挙動推定装置。
【請求項3】
前記第2車両挙動推定部は、第2車両の情報と前記道路情報に基づいて、第2車両の横移動に関する情報を演算し、前記横移動に関する情報に基づいて、第2車両の横移動による車線変更の確率を推定し、
第2車両と第2車両の周辺環境との関係により第2車両の車線変更が誘発される誘発要因による車線変更の確率を推定し、
前記横移動による車線変更の確率と、前記誘発要因による車線変更の確率とを加重平均して、第2車両の前記車両挙動として、第2車両の車線変更の確率を演算する請求項1に記載の車両挙動推定装置。
【請求項4】
前記第2車両挙動推定部は、第2車両の前記横移動に関する情報として、第2車両の走行車線に対する第2車両の横方向における位置、速度、加速度、位置の時間変化量、速度の時間変化量、及び加速度の時間変化量の少なくとも一つ以上の情報を演算し、演算した前記横移動に関する情報に基づいて、第2車両の走行車線に対する第2車両の横方向の移動傾向が大きいほど、推定する前記横移動による車線変更の確率を大きくする請求項2又は3に記載の車両挙動推定装置。
【請求項5】
前記第2車両挙動推定部は、第2車両の横移動に関する情報が入力され、前記横移動による車線変更の確率を出力するように学習された学習モデルを用いて、第2車両の横移動に関する情報に基づいて、第2車両の横移動による車線変更の確率を判定する請求項2又は3に記載の車両挙動推定装置。
【請求項6】
前記信頼度演算部は、前記推定困難度に寄与する要因として、少なくとも、第1車両と第2車両との距離、第2車両の検出に関わる道路曲率、第2車両の検出に関わる道路勾配、及び第2車両の検出に関わる第2車両と他車両との重なり度合いの1つ以上に基づいて、前記推定信頼度を演算する請求項1から3のいずれか一項に記載の車両挙動推定装置。
【請求項7】
前記信頼度演算部は、前記推定困難度に寄与する要因として、少なくとも、第2車両を検出するセンサの検出状態に基づいて、前記推定信頼度を演算し、
前記センサの検出状態として、第2車両を検出する各センサから出力される検出結果の信頼度情報、第2車両を検出するための複数のセンサの内、検出結果を利用可能なセンサ数、第2車両を検出するための複数のセンサの検出値における外れ値の有無、及び第2車両を検出するための複数のセンサの検出値における時間的不連続の有無の一つ以上が含まれる請求項1から3のいずれか一項に記載の車両挙動推定装置。
【請求項8】
前記信頼度演算部は、前記第2車両挙動推定部による過去の前記車両挙動の推定結果が誤っていた場合に、前記推定信頼度を低下させる請求項1から3のいずれか一項に記載の車両挙動推定装置。
【請求項9】
前記第2車両挙動推定部により推定された第2車両の前記車両挙動と、前記信頼度演算部により演算された前記推定信頼度と、に基づいて、第2車両が推定された前記車両挙動を実行するか否かを最終的に判定する車両挙動判定部を、更に備えた請求項1から3のいずれか一項に記載の車両挙動推定装置。
【請求項10】
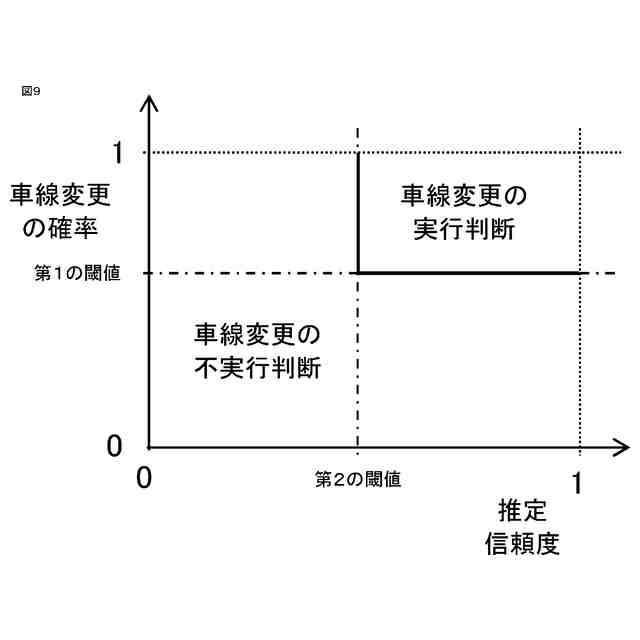
前記車両挙動判定部は、前記第2車両挙動推定部により第2車両の前記車両挙動として推定された第2車両の車線変更の確率と、前記信頼度演算部により演算された前記推定信頼度と、に基づいて、第2車両が推定された車線変更を実行するか否かを最終的に判定する請求項9に記載の車両挙動推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両挙動推定装置及び車両挙動推定方法に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
自車両の前側に割り込む他車両に対して、割り込みが完了する前に車線変更を推定し、事前に自車両の制御を行うことで安全及び快適性を向上させる技術がある。特許文献1の技術では、他車両の車線変更を、検出した他車両の位置及び速度などの他車両の走行状態から推定している。また、自車両と他車両との距離に応じて、判定基準が変更されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-142901号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、他車両の走行状態の検出状態、及び道路状態によっては、他車両の車両挙動の推定の困難度が変化し、推定結果の信頼度が変化する。例えば、他車両の走行状態を検出するセンサの検出状態が悪い場合、又は自車両から他車両の見通しが悪い場合に、推定の困難度が高くなり、推定結果の信頼度が低下する。
【0005】
しかしながら、特許文献1の技術では、検出した他車両の走行状態から車線変更を推定しているが、推定の困難度が考慮されていない。そのため、推定の困難度が高く、推定結果の信頼度が低い場合でも、同様に推定結果が用いられる。
【0006】
そこで、本開示は、第1車両の周囲に存在する第2車両の車両挙動を推定する際に、推定の困難度による推定信頼度の情報を得ることができる車両挙動推定装置及び車両挙動推定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る車両挙動推定装置は、
第1車両が走行する道路情報、及び第1車両の周辺に存在する周辺車両の情報を取得する情報取得部と、
前記周辺車両から車両挙動の推定対象である第2車両を設定し、少なくとも第2車両の情報と前記道路情報とに基づいて、第2車両の車両挙動を推定する第2車両挙動推定部と、
第1車両の情報、第2車両の情報、及び前記道路情報の内、少なくとも1つの情報に基づいて、第2車両の車両挙動の推定困難度による、第2車両の車両挙動の推定信頼度を演算する信頼度演算部と、
を備えたものである。
【0008】
本開示に係る車両挙動推定方法は、
第1車両が走行する道路情報、及び第1車両の周辺に存在する周辺車両の情報を取得する情報取得ステップと、
前記周辺車両から車両挙動の推定対象である第2車両を設定し、少なくとも第2車両の情報と前記道路情報とに基づいて、第2車両の車両挙動を推定する第2車両挙動推定ステップと、
第1車両の情報、第2車両の情報、及び前記道路情報の内、少なくとも1つの情報に基づいて、第2車両の車両挙動の推定困難度による、第2車両の車両挙動の推定信頼度を演算する信頼度演算ステップと、
を備えたものである。
【発明の効果】
【0009】
本開示に係る車両挙動推定装置及び車両挙動推定方法によれば、第1車両の情報、第2車両の情報、及び前記道路情報の内、少なくとも1つの情報に基づいて、第2車両の車両挙動の推定困難度による、第2車両の車両挙動の推定信頼度が演算されるので、第2車両の車両挙動の推定結果に対する評価指標を与えることができ、第2車両の車両挙動の推定結果を適切に利用させることができる。
【図面の簡単な説明】
【0010】
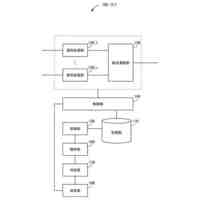
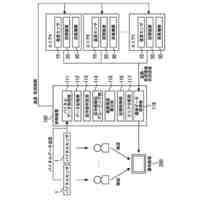
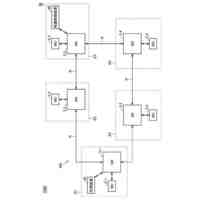
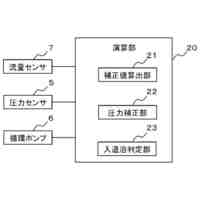
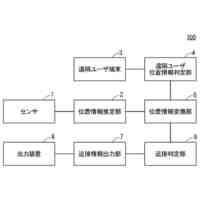
実施の形態1に係る車両挙動推定装置の概略ブロック図である。
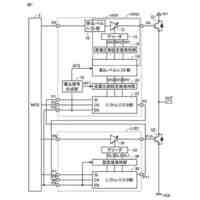
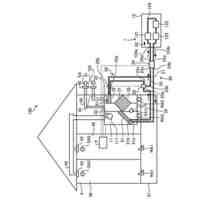
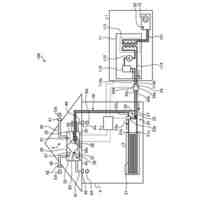
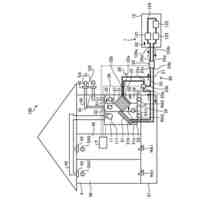
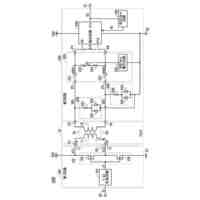
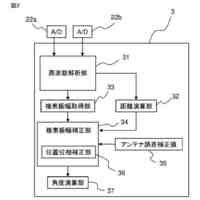
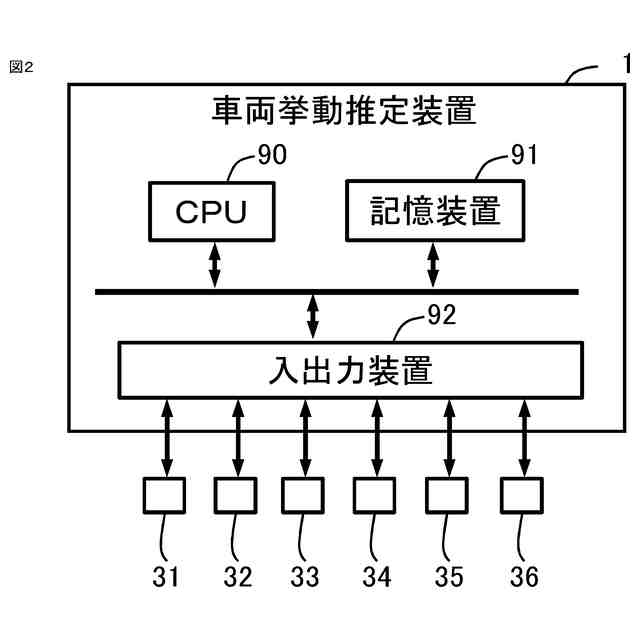
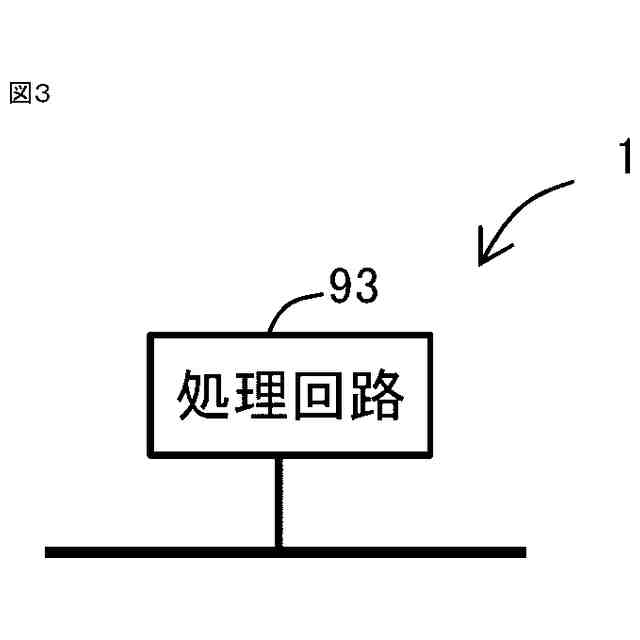
実施の形態1に係る車両挙動推定装置の概略ハードウェア構成図である。
実施の形態1に係る車両挙動推定装置の概略ハードウェア構成図である。
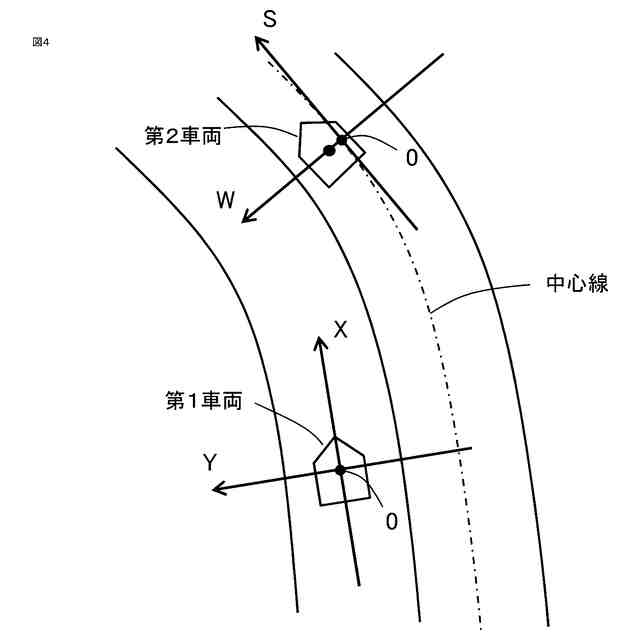
実施の形態1に係る第1車両の座標系及び第2車両の道路座標系を説明するための図である。
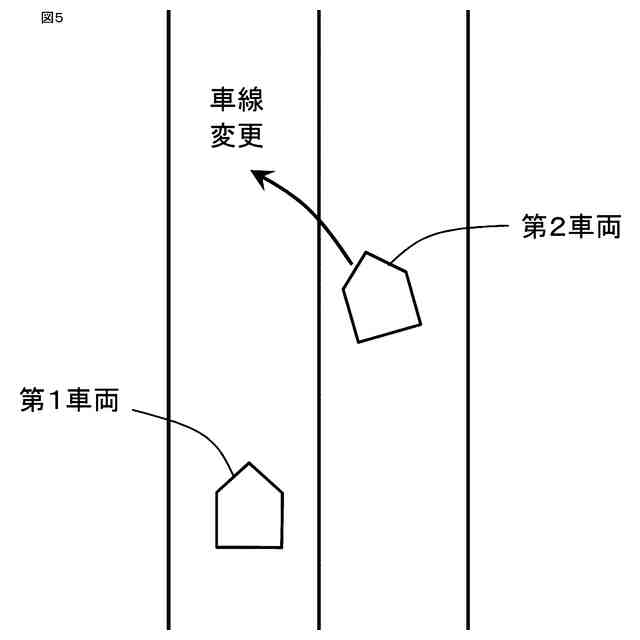
実施の形態1に係る第1車両の前側への第2車両の車線変更を説明するための模式図である。
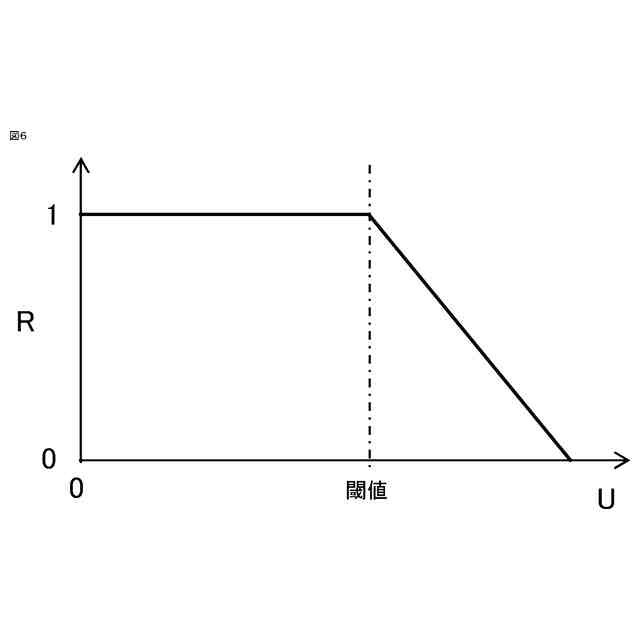
実施の形態1に係る各要因の推定信頼度の演算を説明するための模式図である。
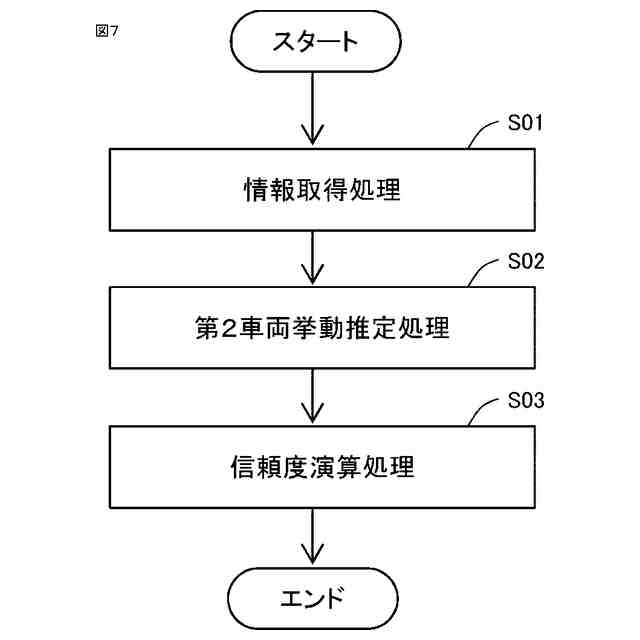
実施の形態1に係る車両挙動推定装置の処理を説明するためのフローチャートである。
実施の形態2に係る車両挙動推定装置の概略ブロック図である。
実施の形態2に係る車両挙動判定部の判定を説明するための図である。
実施の形態2に係る車両挙動判定部の判定を説明するための図である。
実施の形態2に係る車両挙動判定部の判定を説明するための図である。
実施の形態2に係る車両挙動推定装置の処理を説明するためのフローチャートである。
実施の形態3に係る車両挙動推定装置の概略ブロック図である。
実施の形態3に係る車両挙動推定装置の処理を説明するためのフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
送風機
2日前
三菱電機株式会社
放電装置
10日前
三菱電機株式会社
発光装置
10日前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
半導体装置
11日前
三菱電機株式会社
加熱調理器
4日前
三菱電機株式会社
半導体装置
11日前
三菱電機株式会社
半導体装置
27日前
三菱電機株式会社
光通信装置
10日前
三菱電機株式会社
半導体装置
17日前
三菱電機株式会社
半導体装置
18日前
三菱電機株式会社
空調システム
2日前
三菱電機株式会社
半導体製造装置
20日前
三菱電機株式会社
半導体モジュール
17日前
三菱電機株式会社
換気空調システム
26日前
三菱電機株式会社
換気空調システム
26日前
三菱電機株式会社
換気空調システム
26日前
三菱電機株式会社
保護リレーシステム
17日前
三菱電機株式会社
モータ及び送風装置
2日前
三菱電機株式会社
手持ち式電気掃除機
3日前
三菱電機株式会社
アレーアンテナ装置
3日前
三菱電機株式会社
移載装置及び吸着方法
27日前
三菱電機株式会社
水位変化検出システム
6日前
三菱電機株式会社
拡管工具および管の拡管方法
17日前
三菱電機株式会社
半導体チップ及び半導体装置
27日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
三菱電機株式会社
送風システム及び空調システム
11日前
三菱電機株式会社
送風システム及び空調システム
11日前
三菱電機株式会社
ベーパーチャンバー及び冷却装置
25日前
三菱電機株式会社
バーチャルオフィス支援システム
18日前
三菱電機株式会社
信号伝達回路および電力変換装置
2日前
三菱電機株式会社
電気掃除機用吸込具及び電気掃除機
3日前
三菱電機株式会社
レーダ装置および物体位置検出方法
10日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
20日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ