TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067171
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023176917
出願日
2023-10-12
発明の名称
荷役システム
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20250417BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】省人化を図ることができる荷役システムを提供する。
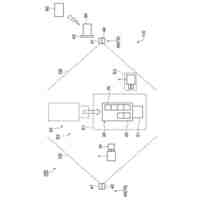
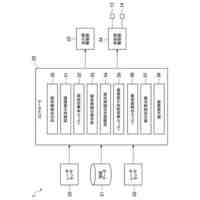
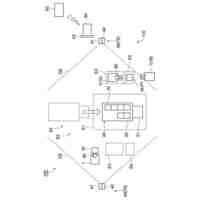
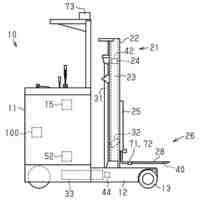
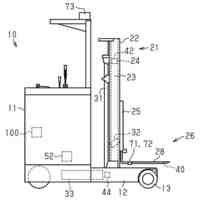
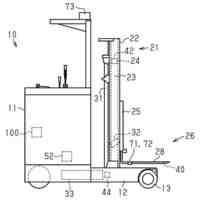
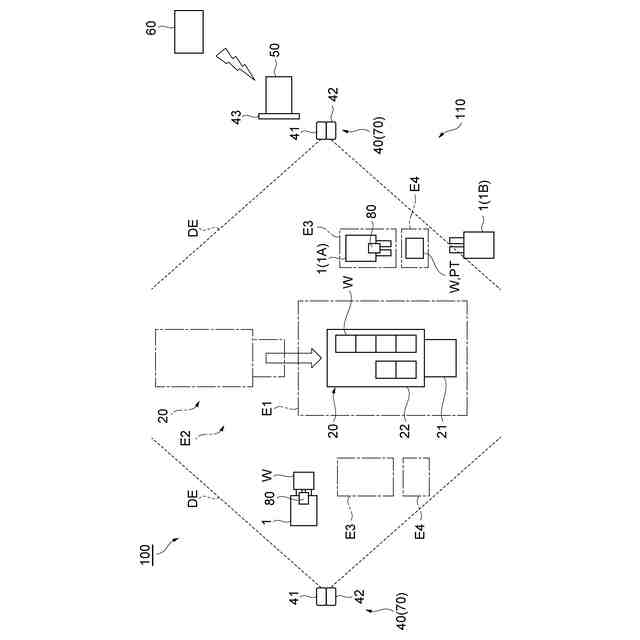
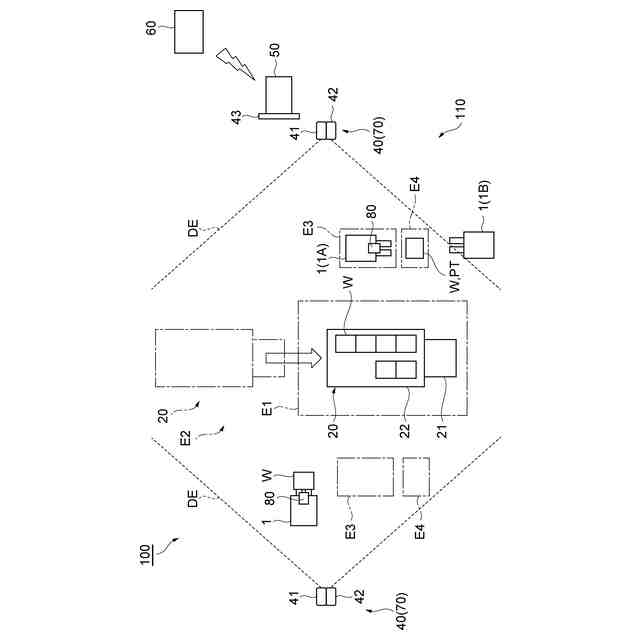
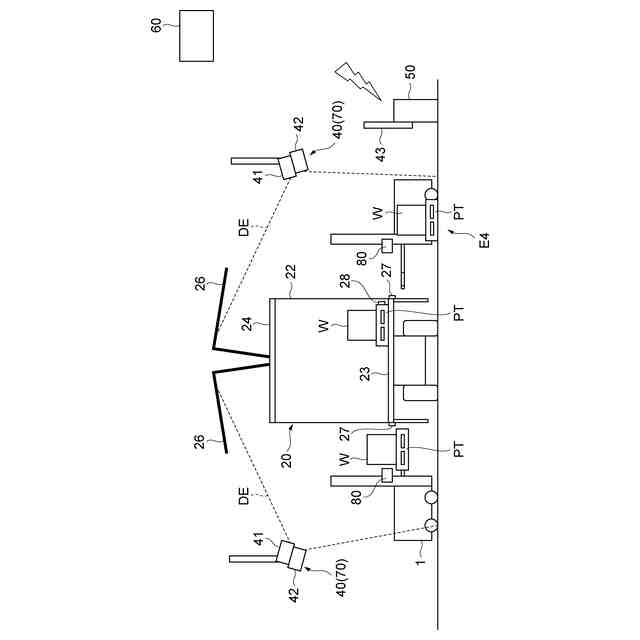
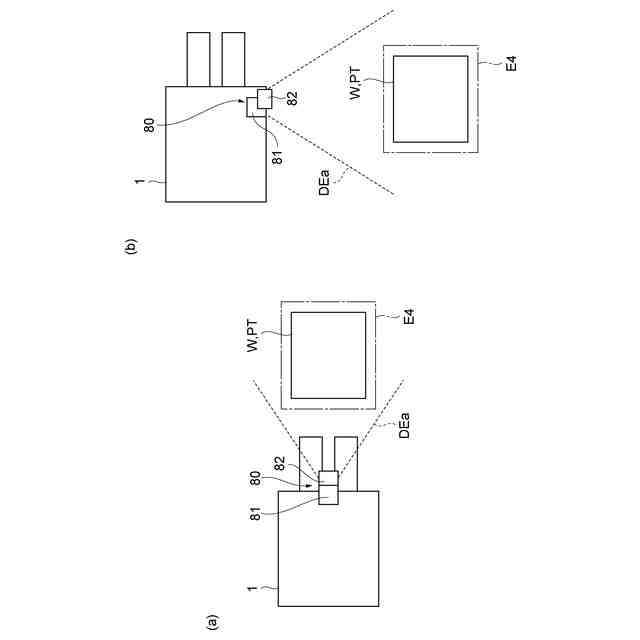
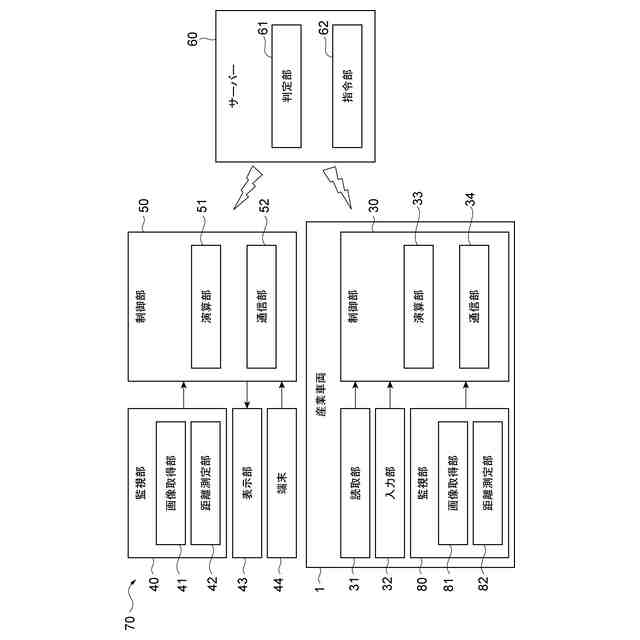
【解決手段】荷役システム100は、荷役作業の工程の間を中継する中継位置E4の状態を監視する監視部40,80を備える。監視部40,80は、例えば荷物Wの受け渡し場所における受け渡し状態など、ある工程と、次の工程との中継位置E4の状態を監視することができる。このような中継位置E4の状態からは、例えば荷物Wの有無や障害物の有無などを把握することができるため、次の工程を実行できる状態であるかを把握することができる。これに対し、荷役システム100は、監視部40,80によって取得された情報に基づき、次の工程の実行の可否を判定する判定部61を有する。判定部61が、中継位置E4の状態を把握することで、作業者の判断などによらず、自動的に次の工程の実行の可否を判定できる。
【選択図】図2
特許請求の範囲
【請求項1】
産業車両が荷役作業を行う荷役システムであって、
前記産業車両と、
産業車両が荷役作業を行う作業場と、
前記荷役作業の工程の間を中継する中継位置の状態を監視する監視部と、
前記監視部によって取得された情報に基づき、次の工程の実行の可否を判定する判定部と、を備える、荷役システム。
続きを表示(約 400 文字)
【請求項2】
前記判定部は、前記中継位置に存在していた対象物が前記中継位置から無くなったことに基づいて、前記次の工程を実行可能と判定する、請求項1に記載の荷役システム。
【請求項3】
前記判定部は、前記中継位置に対象物が到達したことに基づいて、前記次の工程を実行可能と判定する、請求項1に記載の荷役システム。
【請求項4】
前記対象物は、パレットである、請求項2又は3に記載された荷役システム。
【請求項5】
前記監視部は、画像を取得する画像取得部を有する、請求項1に記載された荷役システム。
【請求項6】
前記監視部は、前記産業車両に設けられる、請求項1に記載された荷役システム。
【請求項7】
前記監視部は、前記作業場において前記産業車両とは異なる位置に設けられる、請求項1に記載された荷役システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、荷役システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来の荷役システムとして、例えば特許文献1に記載の荷役システムがある。この従来の荷役システムは、搬送車両に対してフォークリフトなどの産業車両で荷役作業を行うシステムである。荷役システムは、地上装置として距離を測定する機器を有している。荷役システムは、荷台上のパレットの距離を測定し、当該距離情報に基づいて、産業車両に荷役に関する指令を送信する。
【先行技術文献】
【特許文献】
【0003】
特開2021-195215号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
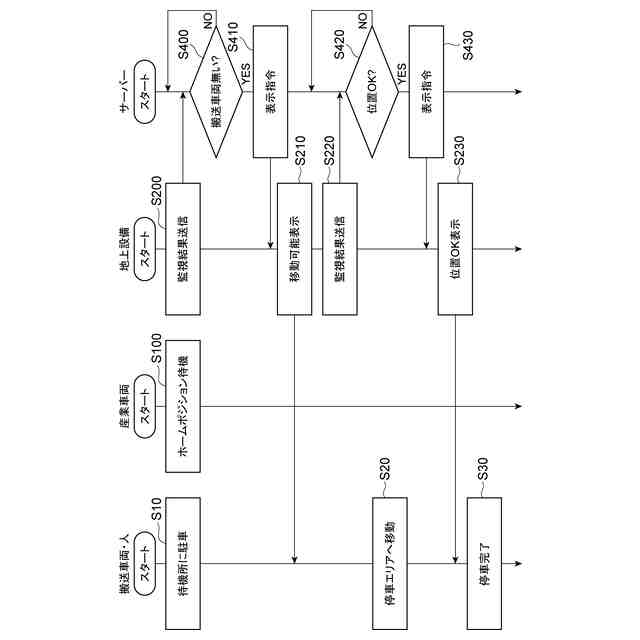
上述した従来の荷役システムにおいて、荷役作業におけるある工程が行われ、次の工程を実行するときに、当該次の工程を実行してよいか否かの判定が必要となることがある。このような荷役作業の工程の遷移判定は、現場の作業者の確認によって行われていた。そのため、荷役システムにおける省人化が求められていた。
【0005】
本開示は、上記課題の解決のためになされたものであり、省人化を図ることができる荷役システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一側面に係る荷役システムは、産業車両が荷役作業を行う荷役システムであって、産業車両と、産業車両が荷役作業を行う作業場と、荷役作業の工程の間を中継する中継位置の状態を監視する監視部と、監視部によって取得された情報に基づき、次の工程の実行の可否を判定する判定部と、を備える。
【0007】
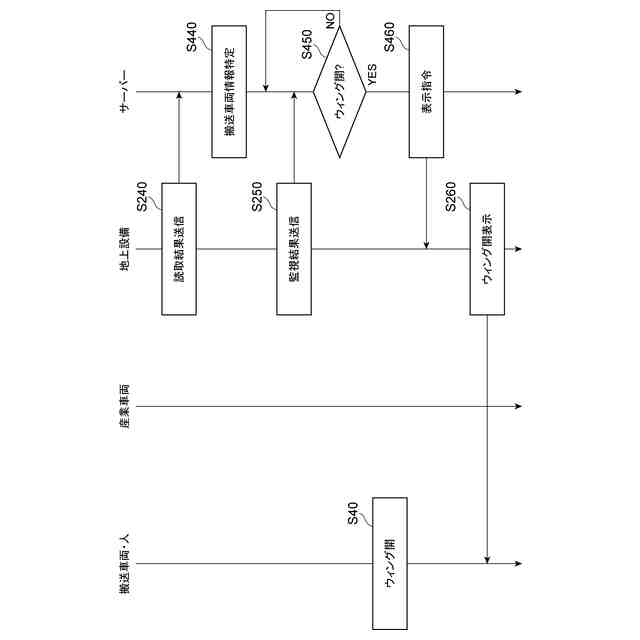
この荷役システムは、荷役作業の工程の間を中継する中継位置の状態を監視する監視部を備える。監視部は、例えば荷物の受け渡し場所における受け渡し状態など、ある工程と、次の工程との中継位置の状態を監視することができる。このような中継位置の状態からは、例えば荷物の有無や障害物の有無などを把握することができるため、次の工程を実行できる状態であるかを把握することができる。これに対し、荷役システムは、監視部によって取得された情報に基づき、次の工程の実行の可否を判定する判定部を有する。判定部が、中継位置の状態を把握することで、作業者の判断などによらず、自動的に次の工程の実行の可否を判定できる。以上より、荷役システムにおける省人化を図ることができる。
【0008】
判定部は、中継位置に存在していた対象物が中継位置から無くなったことに基づいて、次の工程を実行可能と判定してよい。中継位置から対象物が無くなれば、当該中継位置に次の対象物を配置する工程を実行することが可能となる。従って、判定部は、対象物が中継位置から無くなったことに基づいて、容易に判定を行うことができる。
【0009】
判定部は、中継位置に対象物が到達したことに基づいて、次の工程を実行可能と判定してよい。中継位置に対象物が到達した場合、当該中継位置の対象物を搬送する工程を実行することが可能となる。従って、判定部は、中継位置に対象物が到達したことに基づいて、容易に判定を行うことができる。
【0010】
対象物は、パレットであってよい。これにより、監視部は、中継位置におけるパレットの有無を監視することで、容易に中継位置の状態を把握することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
充電器
13日前
株式会社豊田自動織機
遠心圧縮機
17日前
株式会社豊田自動織機
荷役システム
12日前
株式会社豊田自動織機
積付制御装置
3日前
株式会社豊田自動織機
電流検出装置
3日前
株式会社豊田自動織機
荷役システム
3日前
株式会社豊田自動織機
電力変換装置
17日前
株式会社豊田自動織機
フォークリフト
3日前
株式会社豊田自動織機
フォークリフト
3日前
株式会社豊田自動織機
フォークリフト
3日前
株式会社豊田自動織機
情報送受信方法
3日前
株式会社豊田自動織機
フォークリフト
3日前
株式会社豊田自動織機
電流検出用抵抗器
3日前
株式会社豊田自動織機
内燃機関の吸気装置
17日前
株式会社豊田自動織機
内燃機関の吸気装置
17日前
株式会社豊田自動織機
蓄電モジュール製造方法
12日前
トヨタ自動車株式会社
二次電池
10日前
株式会社豊田自動織機
電極材料、及び電極材料の製造方法
5日前
株式会社豊田自動織機
回転電機のステータ、及びインシュレータ
13日前
トヨタ自動車株式会社
蓄電セルの製造方法
10日前
トヨタ自動車株式会社
バイポーラ電池の製造方法
11日前
トヨタ自動車株式会社
電池の製造方法、電池製造システム
10日前
個人
懸吊装置
7か月前
ユニパルス株式会社
吊具
10か月前
個人
海上コンテナ昇降装置
4か月前
ユニパルス株式会社
吊具装置
5か月前
ユニパルス株式会社
荷役装置
3か月前
株式会社豊田自動織機
荷役車両
4か月前
水戸工業株式会社
吊り具
20日前
株式会社豊田自動織機
荷役車両
3か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
9か月前
白山工業株式会社
バランサ
1か月前
株式会社日本キャリア工業
昇降機
8か月前
ユニパルス株式会社
荷役助力装置
12か月前
個人
建築部材の吊り上げ装置
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ