TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067608
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177717
出願日
2023-10-13
発明の名称
フォークリフト
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20250417BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】トラックに対するフォークリフトの角度が適切な状態において、荷役を行うことができるフォークリフトを提供すること。
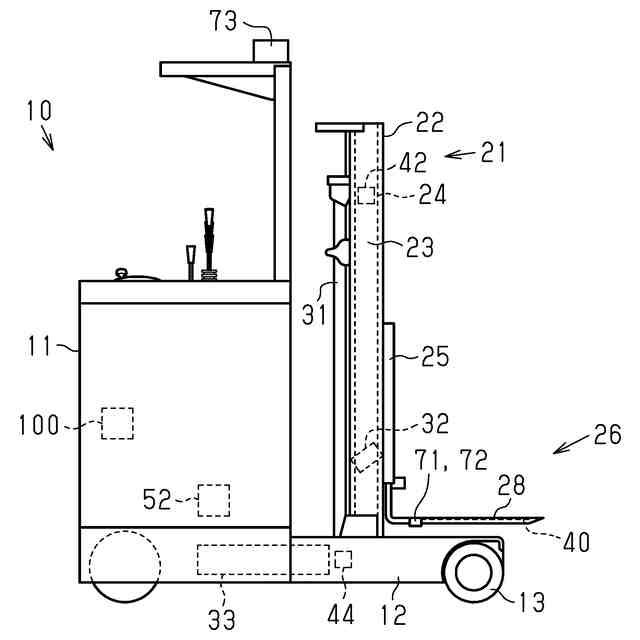
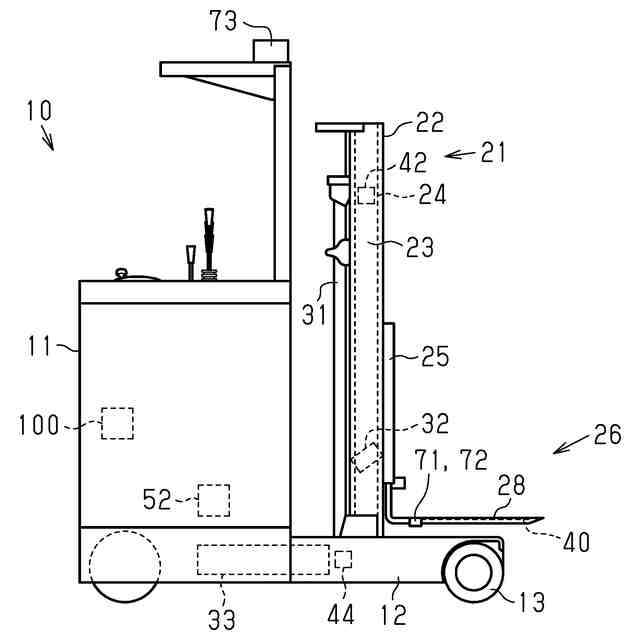
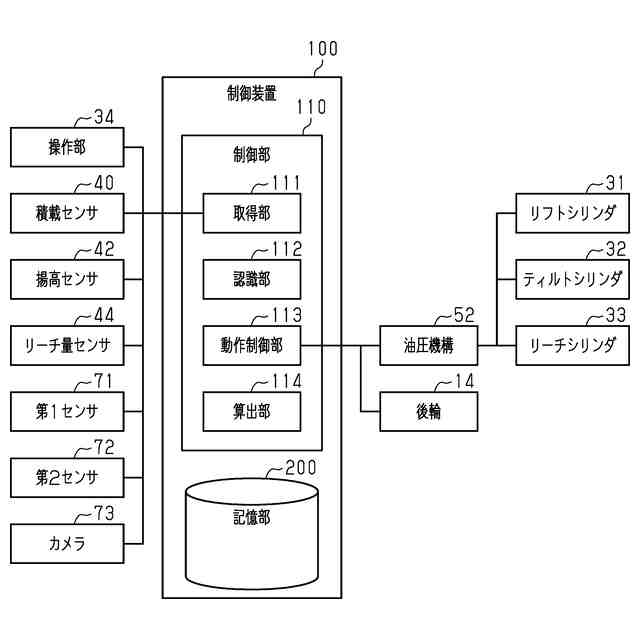
【解決手段】フォークリフト10は、トラックの荷台の上面である積載面に荷役を行うフォークリフト10であって、左右一対の差し込み部28を有するフォーク26を備える荷役装置21と、荷役装置21を制御する制御装置100と、車体前方に設けられ、フォーク26よりも下方に存在する物体までの距離を検出する第1センサ71、及び第2センサ72と、第1センサ71の検出結果と、第2センサ72の検出結果とに基づいて、自装置と、積載面とのずれ角度を算出する算出部と、を備え、制御装置100は、ずれ角度が所定の値未満である場合、荷役に係る制御を行う。
【選択図】図1
特許請求の範囲
【請求項1】
トラックの荷台の上面である積載面に荷役を行うフォークリフトであって、
左右一対の差し込み部を有するフォークを備える荷役装置と、
前記荷役装置を制御する制御装置と、
車体前方に設けられ、前記フォークよりも下方に存在する物体までの距離を検出する第1センサと、
車体前方に設けられつつ、かつ前記第1センサと前記フォークリフトの左右方向において合致する位置に、所定距離だけ離間して設けられ、前記フォークよりも下方に存在する物体までの距離を検出する第2センサと、
前記第1センサの検出結果と、前記第2センサの検出結果とに基づいて、自装置と、前記積載面とのずれ角度を算出する算出部と、を備え、
前記制御装置は、前記ずれ角度が所定の値未満である場合、荷役に係る制御を行う、
フォークリフト。
続きを表示(約 380 文字)
【請求項2】
前記制御装置は、前記ずれ角度が前記所定の値以上である場合、前記荷役装置を停止させる、又は前記ずれ角度がなくなるように制御する、
請求項1に記載のフォークリフト。
【請求項3】
自装置の周辺状況を認識する認識部を更に備え、
前記制御装置は、前記認識部により認識された周辺状況に基づいて前記フォークリフトの操舵または速度のうち一方または双方を制御するものであって、
前記制御装置は、前記フォークリフトを後方に走行させたのち、前記ずれ角度がなくなるよう走行させる、又は前記ずれ角度がなくなるように前記フォークリフトを旋回させる、
請求項2に記載のフォークリフト。
【請求項4】
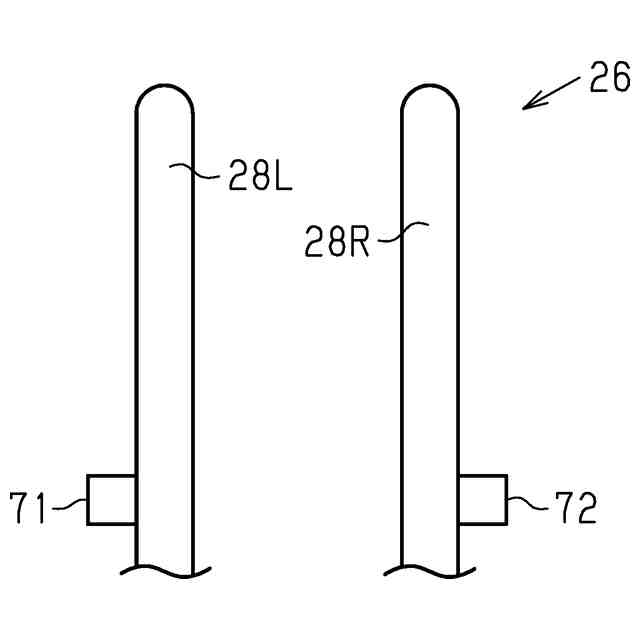
前記第1センサ、及び前記第2センサは、前記差し込み部に設けられる、
請求項1に記載のフォークリフト。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フォークリフトに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、フォークリフトに設けられたカメラが生成した画像を用いて、画像認識を行うことにより、フォークリフトの移動に用いられる指標を提供する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-40769号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、フォークリフトの荷役を行う場所がトラックの荷台の上面である場合、トラックの荷台の前後方向に沿って荷役を行うほうが、荷台の上面に効率よく荷を積載できる。一方で、フォークリフトがトラックの前後方向に直交する方向以外の方向から斜めに進行する場合、トラックの荷台の前後方向に沿って荷役を行うことが困難である。特許文献1に記載の技術では、荷台の際に荷役を行うことができても、トラックに対するフォークリフトの角度を判定することまでは困難であった。
【課題を解決するための手段】
【0005】
上記目的を達成するフォークリフトは、トラックの荷台の上面である積載面に荷役を行うフォークリフトであって、左右一対の差し込み部を有するフォークを備える荷役装置と、前記荷役装置を制御する制御装置と、前記フォークよりも下方に存在する物体までの距離を検出する第1センサと、前記第1センサが設けられた前記差し込み部とは異なる他の前記フォークよりも下方に存在する物体までの距離を検出する第2センサと、前記第1センサの検出結果と、前記第2センサの検出結果とに基づいて、自装置と、前記積載面とのずれ角度を算出する算出部と、を備え、前記制御装置は、前記ずれ角度が所定の値未満である場合、荷役に係る制御を行う、ことを特徴とする。
【0006】
かかる構成によれば、トラックに対するフォークリフトの角度が適切な状態において、荷役を行うことができる。
上記目的を達成するフォークリフトにおいて、前記制御装置は、前記ずれ角度が前記所定の値以上である場合、前記荷役装置を停止させる、又は前記ずれ角度がなくなるように制御してもよい。
【0007】
かかる構成によれば、トラックに対するフォークリフトの角度が適切ではない状態で荷役を行うことを抑制することができる。
上記目的を達成するフォークリフトにおいて、自装置の周辺状況を認識する認識部を更に備え、前記制御装置は、前記認識部により認識された周辺状況に基づいて前記フォークリフトの操舵または速度のうち一方または双方を制御するものであって、前記制御装置は、前記フォークリフトを後方に走行させたのち、前記ずれ角度がなくなるよう走行させる、又は前記ずれ角度がなくなるように前記フォークリフトを旋回させてもよい。
【0008】
かかる構成によれば、トラックに対するフォークリフトの角度が適切となるようにフォークリフトの向きを調整することができる。
上記目的を達成するフォークリフトにおいて、前記第1センサ、及び前記第2センサは、前記差し込み部に設けられる。かかる構成によれば、フォークよりも下方に存在する物体までの距離を検出しやすくすることができる。
【発明の効果】
【0009】
本発明によれば、トラックに対するフォークリフトの角度が適切な状態において、荷役を行うことができる。
【図面の簡単な説明】
【0010】
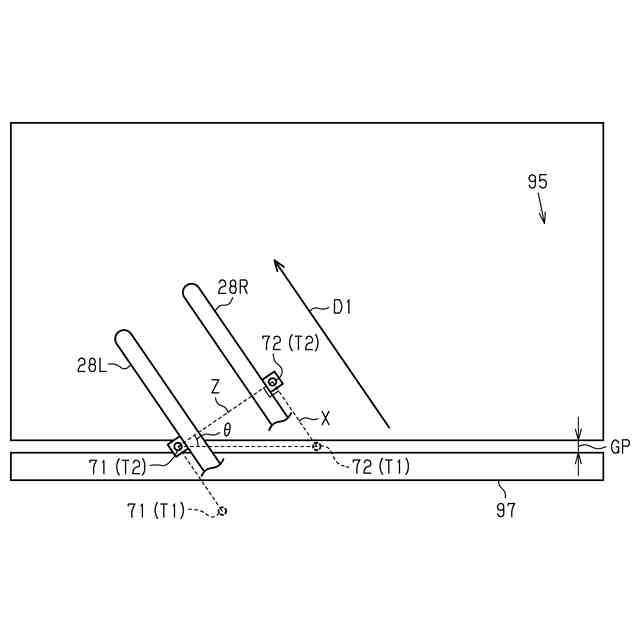
図1は、フォークリフトの説明に用いられる側面図である。
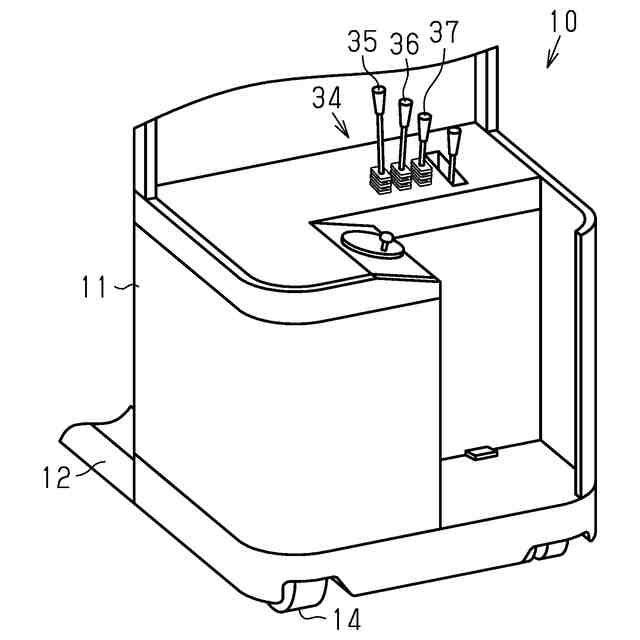
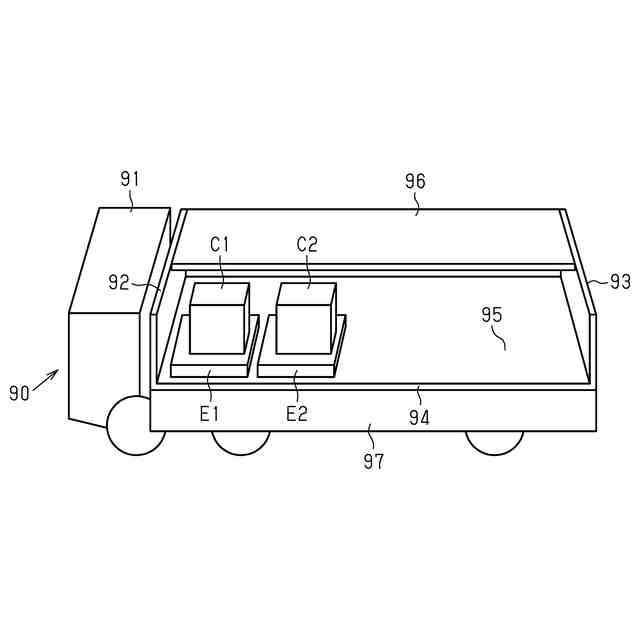
図2は、フォークリフトの説明に用いられる斜視図である。
図3は、フォークの説明に用いられる図である。
図4は、制御装置の構成の一例を示す図である。
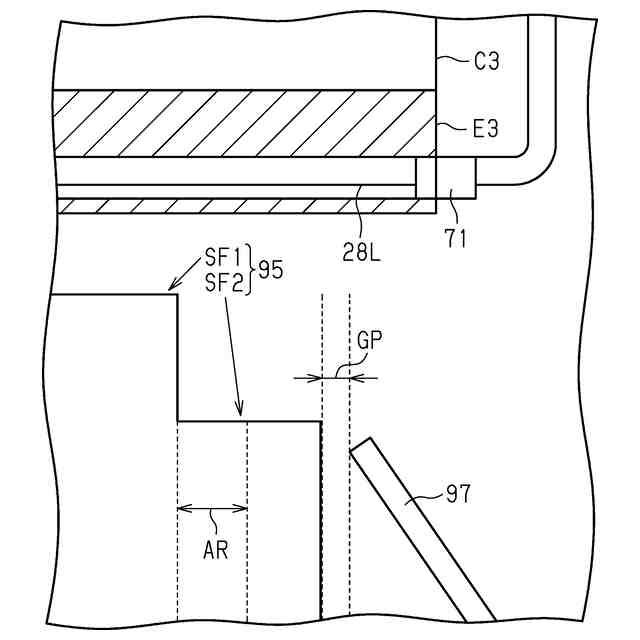
図5は、積載面の説明に用いられる図である。
図6は、荷の積み付けの説明に用いられる図である。
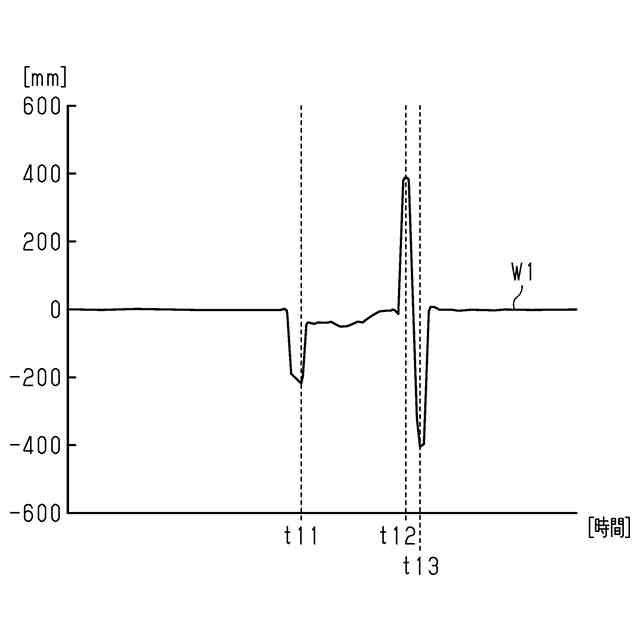
図7は、第1センサの検出結果の一例を示すグラフである。
図8は、ずれ角度の説明に用いられる図である。
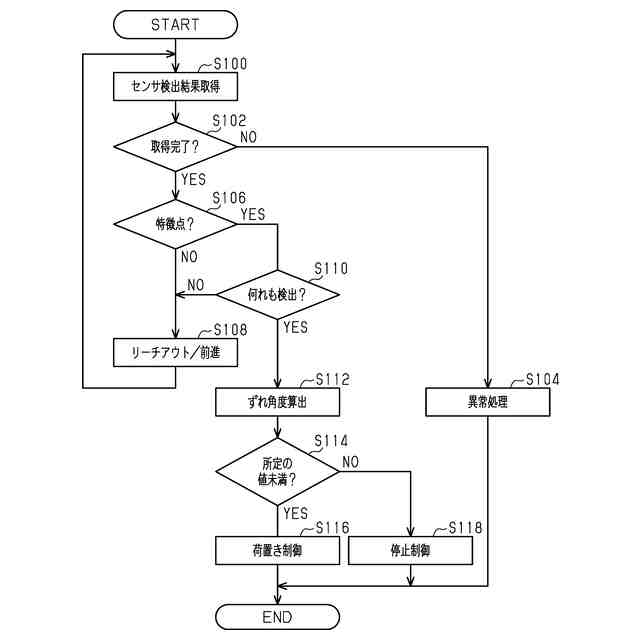
図9は、制御装置が実行する処理の一例を示すフローチャートである。
図10は、第1センサ71の検出結果の別例を示すグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ