TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064455
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174237
出願日
2023-10-06
発明の名称
運転支援装置、運転支援方法、及びプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
G08G
1/16 20060101AFI20250410BHJP(信号)
要約
【課題】自車両の周辺に存在する対象物に対する運転者への注意喚起を、適切な内容により適切なタイミングで行う。
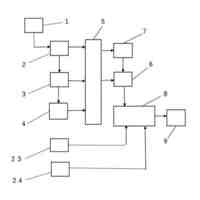
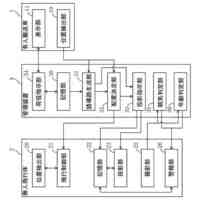
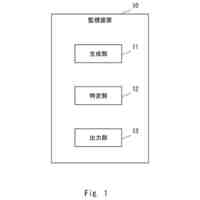
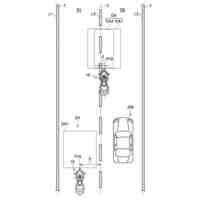
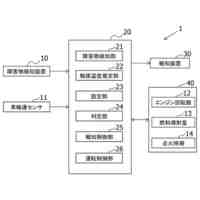
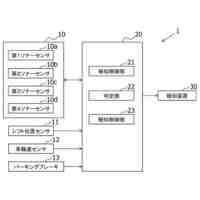
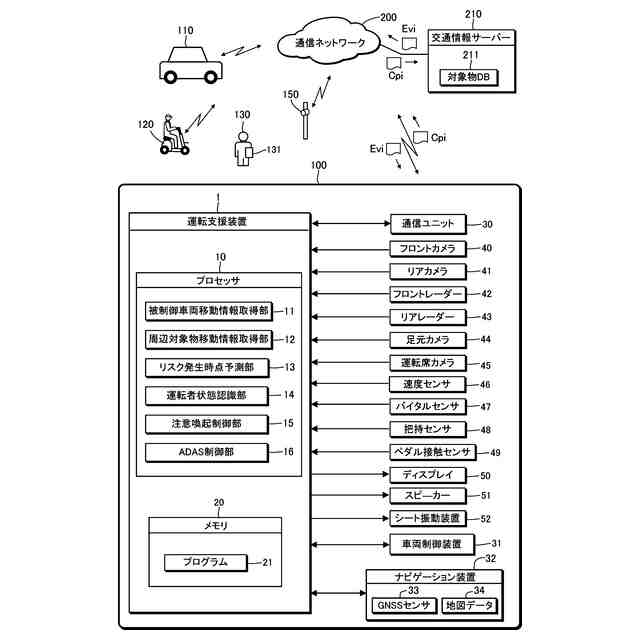
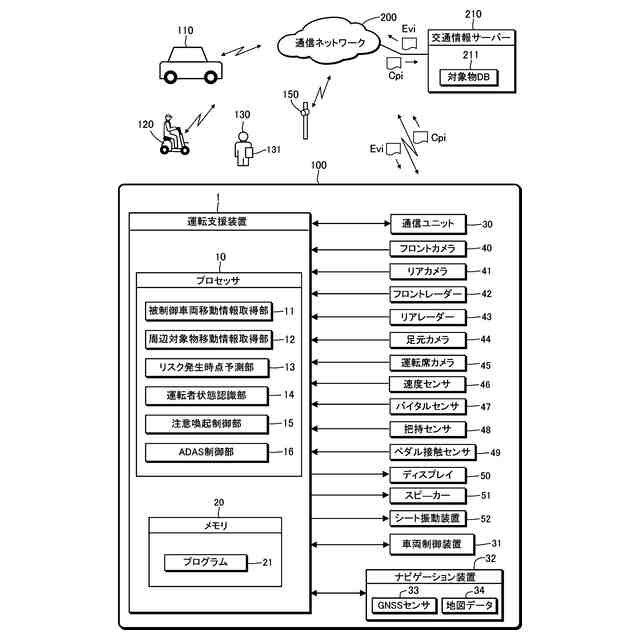
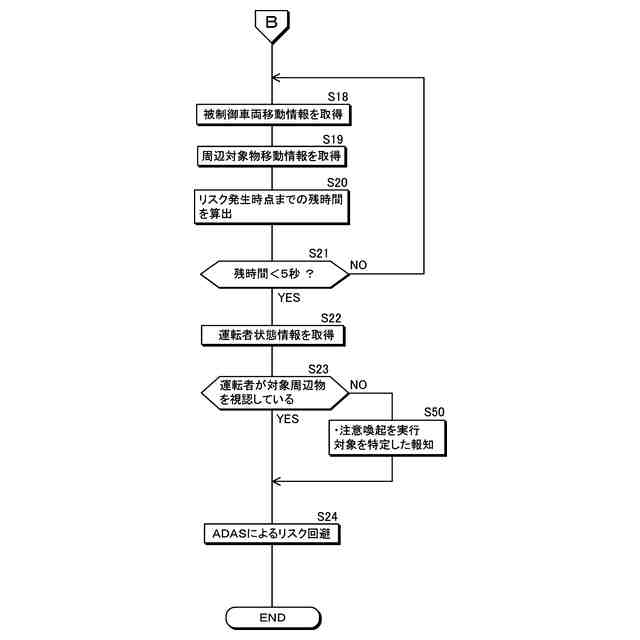
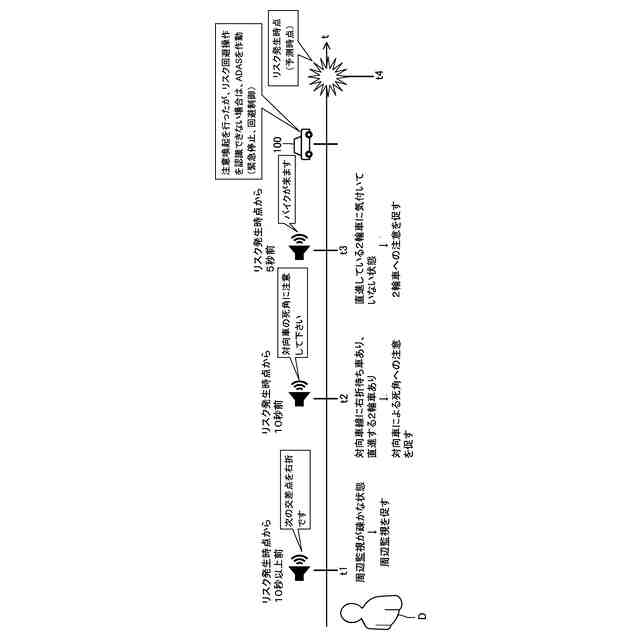
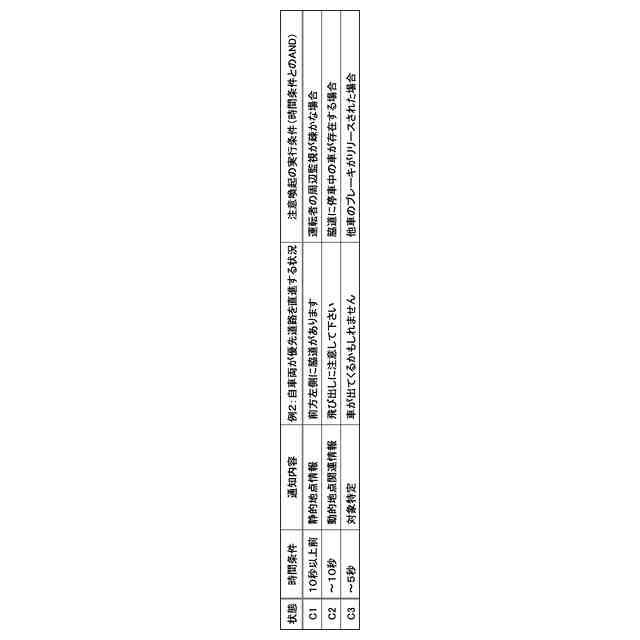
【解決手段】運転支援装置1は、被制御車両移動情報を取得する被制御車両移動情報取得部11と、周辺対象物移動情報を取得する周辺対象物移動情報取得部12と、被制御車両移動情報と周辺対象物移動情報とに基づいて、被制御車両100と周辺対象物120の接近により所定リスクが発生するリスク発生時点を予測するリスク発生時点予測部13と、被制御車両100の運転者の状態を認識する運転者状態認識部14と、リスク発生時点までの残時間と、運転者状態認識部14により認識される運転者の状態とに基づいて、注意喚起の実行タイミングと注意喚起の内容とを決定する注意喚起制御部と、を備える。
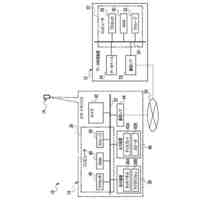
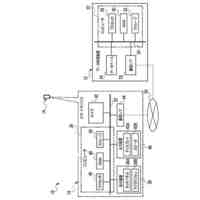
【選択図】図2
特許請求の範囲
【請求項1】
被制御車両について、前記被制御車両の位置情報を含む被制御車両移動情報を取得する被制御車両移動情報取得部と、
前記被制御車両の周辺に存在する周辺対象物について、前記周辺対象物の位置情報を含む周辺対象物移動情報を取得する周辺対象物移動情報取得部と、
前記被制御車両移動情報と前記周辺対象物移動情報とに基づいて、前記被制御車両と前記周辺対象物の接近により所定リスクが発生するリスク発生時点を予測するリスク発生時点予測部と、
前記被制御車両の運転者の状態を認識する運転者状態認識部と、
前記リスク発生時点までの残時間と、前記運転者状態認識部により認識される前記運転者の状態とに基づいて、前記被制御車両に備えられた報知装置による注意喚起の実行タイミングと前記注意喚起の内容とを決定する注意喚起制御部と、
を備える運転支援装置。
続きを表示(約 1,600 文字)
【請求項2】
前記運転者状態認識部は、前記運転者の状態として、前記運転者の視線の向きを認識し、
前記周辺対象物移動情報には、前記周辺対象物において前記被制御車両が認識されているか否かを示す情報が含まれ、
前記注意喚起制御部は、前記運転者状態認識部により、前記運転者の視線が前記周辺対象物に向いていることが認識されている場合であっても、前記周辺対象物移動情報により、前記周辺対象物において前記被制御車両が認識されていないと判断できるときには、前記注意喚起を実行する
請求項1に記載の運転支援装置。
【請求項3】
前記注意喚起制御部は、前記所定リスクの発生時点までの残時間が短くなるに従って、前記注意喚起のレベルを高くする
請求項1又は請求項2に記載の運転支援装置。
【請求項4】
前記運転者状態認識部は、前記運転者の状態として、前記運転者による前記被制御車両の運転状態を認識し、
前記注意喚起制御部は、前記運転者状態認識部により認識される前記運転者による前記被制御車両の運転状態から、前記運転者が前記所定リスクを回避できる状態であると判断できる場合は、前記注意喚起を実行しない
請求項1又は請求項2に記載の運転支援装置。
【請求項5】
前記運転者状態認識部は、前記運転者の前記運転者の健康状態と、前記運転者の視線の向きと、を認識し、
前記注意喚起制御部は、前記運転者状態認識部により、前記運転者の視線が前記周辺対象物に向いていることが認識されている場合に、前記運転者状態認識部により認識される前記運転者の健康状態に応じて、前記注意喚起を行うか否かを決定する
請求項1又は請求項2に記載の運転支援装置。
【請求項6】
コンピュータにより実行される運転支援方法であって、
被制御車両について、前記被制御車両の位置情報を含む被制御車両移動情報を取得する被制御車両移動情報取得ステップと、
前記被制御車両の周辺に存在する周辺対象物について、前記周辺対象物の位置情報を含む周辺対象物移動情報を取得する周辺対象物移動情報取得ステップと、
前記被制御車両移動情報と前記周辺対象物移動情報とに基づいて、前記被制御車両と前記周辺対象物の接近により所定リスクが発生するリスク発生時点を予測するリスク発生時点予測ステップと、
前記被制御車両の運転者の状態を認識する運転者状態認識ステップと、
前記リスク発生時点までの残時間と、前記運転者状態認識ステップにより認識される前記運転者の状態とに基づいて、前記被制御車両に備えられた報知装置による注意喚起の実行タイミングと前記注意喚起の内容とを決定する注意喚起制御ステップと、
含む運転支援方法。
【請求項7】
コンピュータを、
被制御車両について、前記被制御車両の位置情報を含む被制御車両移動情報を取得する被制御車両移動情報取得部と、
前記被制御車両の周辺に存在する周辺対象物について、前記周辺対象物の位置情報を含む周辺対象物移動情報を取得する周辺対象物移動情報取得部と、
前記被制御車両移動情報と前記周辺対象物移動情報とに基づいて、前記被制御車両と前記周辺対象物の接近により所定リスクが発生するリスク発生時点を予測するリスク発生時点予測部と、
前記被制御車両の運転者の状態を認識する運転者状態認識部と、
前記リスク発生時点までの残時間と、前記運転者状態認識部により認識される前記運転者の状態とに基づいて、前記被制御車両に備えられた報知装置による注意喚起の実行タイミングと前記注意喚起の内容とを決定する注意喚起制御部と、
して機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置、運転支援方法、及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、自車両に備えられたカメラやレーダー装置の監視範囲について、他車両の陰となって監視ができなくなっている死角範囲を算出し、地図画像上に死角範囲を表示して運転者に対する注意喚起を行う車載周辺状況提示装置が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2007-233770号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記従来の装置は、自車両に備えられたカメラとレーダー装置により検出される自車両の周囲状況に応じて、運転者に対する注意喚起を行うものである。そのため、自車両の周辺を移動する他車両や歩行者の挙動が自車両側で認識されていなかった場合に、運転者に対する注意喚起が、適切なタイミングで行われないおそれがあることが課題である。
本願は上記課題の解決のため、自車両の周辺に存在する対象物に対する運転者への注意喚起を、適切な内容により適切なタイミングで行うことができる運転支援装置、運転支援方法、及びプログラムを提供することによる、安全性の向上を目的としたものである。そして、延いては、交通の安全性をより一層改善して持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0005】
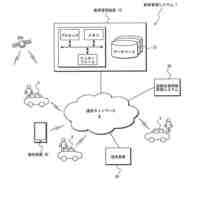
上記目的を達成するための第1態様として、被制御車両について、前記被制御車両の位置情報を含む被制御車両移動情報を取得する被制御車両移動情報取得部と、前記被制御車両の周辺に存在する周辺対象物について、前記周辺対象物の位置情報を含む周辺対象物移動情報を取得する周辺対象物移動情報取得部と、前記被制御車両移動情報と前記周辺対象物移動情報とに基づいて、前記被制御車両と前記周辺対象物の接近により所定リスクが発生するリスク発生時点を予測するリスク発生時点予測部と、前記被制御車両の運転者の状態を認識する運転者状態認識部と、前記リスク発生時点までの残時間と、前記運転者状態認識部により認識される前記運転者の状態とに基づいて、前記被制御車両に備えられた報知装置による注意喚起の実行タイミングと前記注意喚起の内容とを決定する注意喚起制御部と、を備える運転支援装置が挙げられる。
【0006】
上記運転支援装置において、前記運転者状態認識部は、前記運転者の状態として、前記運転者の視線の向きを認識し、前記周辺対象物移動情報には、前記周辺対象物において前記被制御車両が認識されているか否かを示す情報が含まれ、前記注意喚起制御部は、前記運転者状態認識部により、前記運転者の視線が前記周辺対象物に向いていることが認識されている場合であっても、前記周辺対象物移動情報により、前記周辺対象物において前記被制御車両が認識されていないと判断できるときには、前記注意喚起を実行する構成としてもよい。
【0007】
上記運転支援装置において、前記注意喚起制御部は、前記所定リスクの発生時点までの残時間が短くなるに従って、前記注意喚起のレベルを高くする構成としてもよい。
【0008】
上記運転支援装置において、前記運転者状態認識部は、前記運転者の状態として、前記運転者による前記被制御車両の運転状態を認識し、前記注意喚起制御部は、前記運転者状態認識部により認識される前記運転者による前記被制御車両の運転状態から、前記運転者が前記所定リスクを回避できる状態であると判断できる場合は、前記注意喚起を実行しない構成としてもよい。
【0009】
上記運転支援装置において、前記運転者状態認識部は、前記運転者の前記運転者の健康状態と、前記運転者の視線の向きと、を認識し、前記注意喚起制御部は、前記運転者状態認識部により、前記運転者の視線が前記周辺対象物に向いていることが認識されている場合に、前記運転者状態認識部により認識される前記運転者の健康状態に応じて、前記注意喚起を行うか否かを決定する構成としてもよい。
【0010】
上記目的を達成するための第2態様として、コンピュータにより実行される運転支援方法であって、被制御車両について、前記被制御車両の位置情報を含む被制御車両移動情報を取得する被制御車両移動情報取得ステップと、前記被制御車両の周辺に存在する周辺対象物について、前記周辺対象物の位置情報を含む周辺対象物移動情報を取得する周辺対象物移動情報取得ステップと、前記被制御車両移動情報と前記周辺対象物移動情報とに基づいて、前記被制御車両と前記周辺対象物の接近により所定リスクが発生するリスク発生時点を予測するリスク発生時点予測ステップと、前記被制御車両の運転者の状態を認識する運転者状態認識ステップと、前記リスク発生時点までの残時間と、前記運転者状態認識ステップにより認識される前記運転者の状態とに基づいて、前記被制御車両に備えられた報知装置による注意喚起の実行タイミングと前記注意喚起の内容とを決定する注意喚起制御ステップと、含む運転支援方法が挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
15日前
個人
自動車ケアフル灯
12日前
能美防災株式会社
発信機
15日前
三菱ロジスネクスト株式会社
搬送システム
15日前
三菱ロジスネクスト株式会社
搬送システム
15日前
株式会社アジラ
注目行動呼びかけシステム
14日前
三菱ロジスネクスト株式会社
搬送システム
15日前
三菱ロジスネクスト株式会社
搬送システム
15日前
トヨタ自動車株式会社
車両
14日前
東亜電子工業株式会社
警報コントローラ
7日前
矢崎総業株式会社
路面監視装置
13日前
愛知時計電機株式会社
生活データ集計装置
13日前
パナソニックIPマネジメント株式会社
火災警報器
13日前
日本電気株式会社
監視装置、監視方法、及びプログラム
9日前
トヨタ自動車株式会社
配車システム
7日前
能美防災株式会社
加煙試験器
14日前
トヨタ自動車株式会社
情報処理装置
15日前
オンキヨー株式会社
車軸数検出システム、及び、車軸数検出方法
6日前
本田技研工業株式会社
車両
13日前
株式会社SUBARU
処理システム
16日前
株式会社チノー
センサの自動補正システム及び補正方法
6日前
日産自動車株式会社
配車管理装置及び配車管理方法
7日前
スズキ株式会社
車両用報知装置
15日前
スズキ株式会社
車両用報知装置
15日前
日産自動車株式会社
配車管理装置及び配車管理方法
1日前
株式会社SUBARU
車両の立体音像再生システム
13日前
株式会社SUBARU
車両の立体音像再生システム
13日前
日産自動車株式会社
配車管理装置及び配車管理方法
1日前
日産自動車株式会社
配車管理装置及び配車管理方法
1日前
トヨタ自動車株式会社
車両の運転支援システム
6日前
ソフトバンクグループ株式会社
システム
16日前
三菱重工業株式会社
無人航空機の経路設定方法
14日前
ソフトバンクグループ株式会社
システム
16日前
ソフトバンクグループ株式会社
システム
15日前
ソフトバンクグループ株式会社
システム
14日前
ソフトバンクグループ株式会社
システム
14日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ