TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062182
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171071
出願日
2023-10-02
発明の名称
経路探索装置、経路探索方法、及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
21/34 20060101AFI20250407BHJP(測定;試験)
要約
【課題】最短時間で配送が可能な経路探索装置を提供すること。
【解決手段】経路探索装置は、配送物を配送する配送ロボットの経路を探索する経路探索装置であって、経路の路面情報、配送ロボットの情報、配送物の種類、及び配送ロボットの運搬速度の情報を取得する取得手段と、経路の路面情報、配送ロボットの情報、配送物の種類、及び配送ロボットの運搬速度の情報に応じて、配達地までのルートを決定する決定手段とを有する。
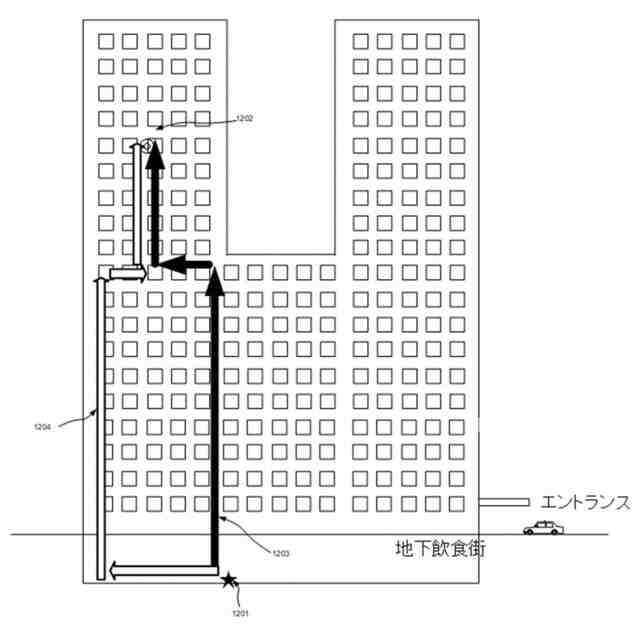
【選択図】図12
特許請求の範囲
【請求項1】
配送物を配送する配送ロボットの経路を探索する経路探索装置であって、
前記経路の路面情報、前記配送ロボットの情報、前記配送物の種類、及び前記配送ロボットの運搬速度の情報を取得する取得手段と、
前記経路の路面情報、前記配送ロボットの情報、前記配送物の種類、及び前記配送ロボットの運搬速度の情報に応じて、配達地までのルートを決定する決定手段とを有することを特徴とする経路探索装置。
続きを表示(約 540 文字)
【請求項2】
前記路面情報は、路面の凹凸により発生する振動情報を含むことを特徴とする請求項1に記載の経路探索装置。
【請求項3】
前記決定手段は、前記配送ロボットの機種及び前記運搬速度と各地点の正規化された前記振動情報とを用いて取得した振動量が前記配送物の種類に応じた許容振動量を超えないように前記ルートを決定することを特徴とする請求項2に記載の経路探索装置。
【請求項4】
前記路面情報は、過去に少なくとも1つ以上の配送ロボットが取得したデータであることを特徴とする請求項1又は2に記載の経路探索装置。
【請求項5】
配送物を配送する配送ロボットの経路を探索する経路探索方法であって、
前記経路の路面情報、前記配送ロボットの情報、前記配送物の種類、及び前記配送ロボットの運搬速度の情報を取得するステップと、
前記経路の路面情報、前記配送ロボットの情報、前記配送物の種類、及び前記配送ロボットの運搬速度の情報に応じて、配達地までのルートを決定するステップとを有することを特徴とする経路探索方法。
【請求項6】
請求項5に記載の経路探索方法をコンピュータに実行させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、経路探索装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、自律走行モビリティや空間認識システム等の技術革新に伴い、異なる組織や社会の構成員の間でデータやシステムをつなぐ全体像(以下、デジタルアーキテクチャ)の開発競争が激化している。また、自律走行ロボットによる物資の運搬や配達に関する技術も開発が進んでいる。特許文献1では、単に最短距離を選択するのではなく、配送ルートの振動と配達物の振動の許容度に応じて配送ルートを探索する構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-79730号公報
【非特許文献】
【0004】
情報処理学会論文誌 Vol.56 No.1 23-24 (Jan.2015)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の構成では、配達物が配送ルート上の各地点での振動量に耐えられるかどうかを判定し、配達物が振動量に耐えられないと判定された特定の地点を通過しない配送ルートを選定する。つまり、特定の地点を通過しない配送ルートが非常に遠回りで時間のかかる配送ルートであっても、特定の地点を通過する配送ルートは選定されない。
【0006】
本発明は、最短時間で配送が可能な経路探索装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一側面としての経路探索装置は、配送物を配送する配送ロボットの経路を探索する経路探索装置であって、経路の路面情報、配送ロボットの情報、配送物の種類、及び配送ロボットの運搬速度の情報を取得する取得手段と、経路の路面情報、配送ロボットの情報、配送物の種類、及び配送ロボットの運搬速度の情報に応じて、配達地までのルートを決定する決定手段とを有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、最短時間で配送が可能な経路探索装置を提供することができる。
【図面の簡単な説明】
【0009】
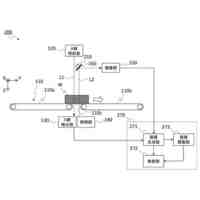
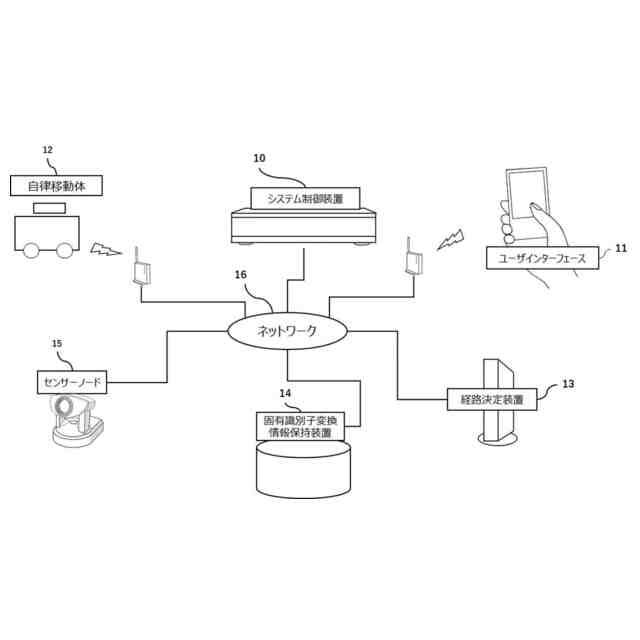
本発明の実施形態に係る自律移動体制御システムの全体構成を示す図である。
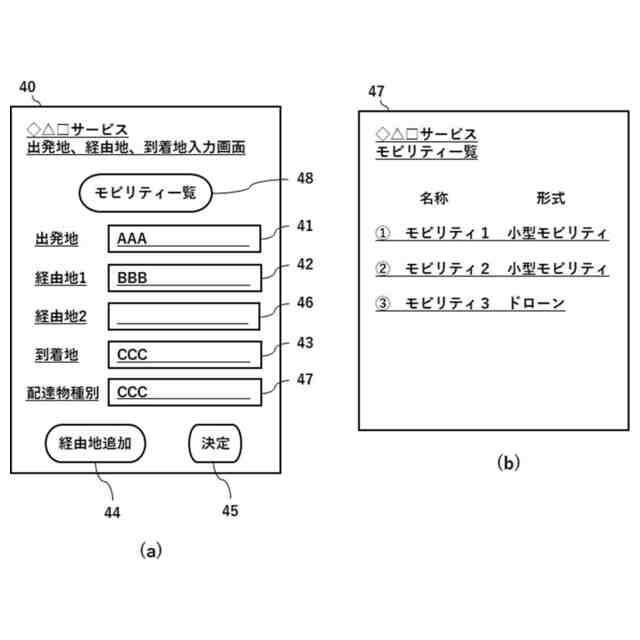
(a)位置情報入力画面を示すイメージ図である。(b)自律移動体を選択する選択画面を示すイメージ図である。
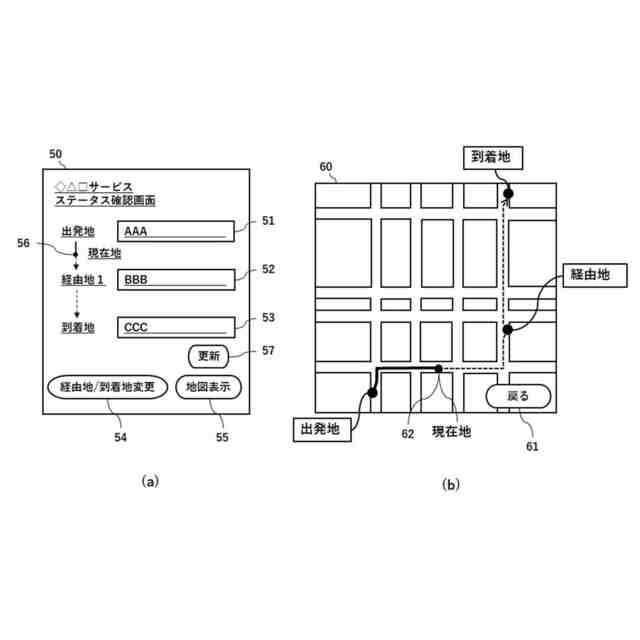
(a)自律移動体の現在位置確認画面を示すイメージ図である。(b)自律移動体の現在位置確認における地図表示画面を示すイメージ図である。
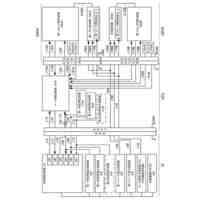
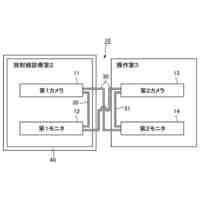
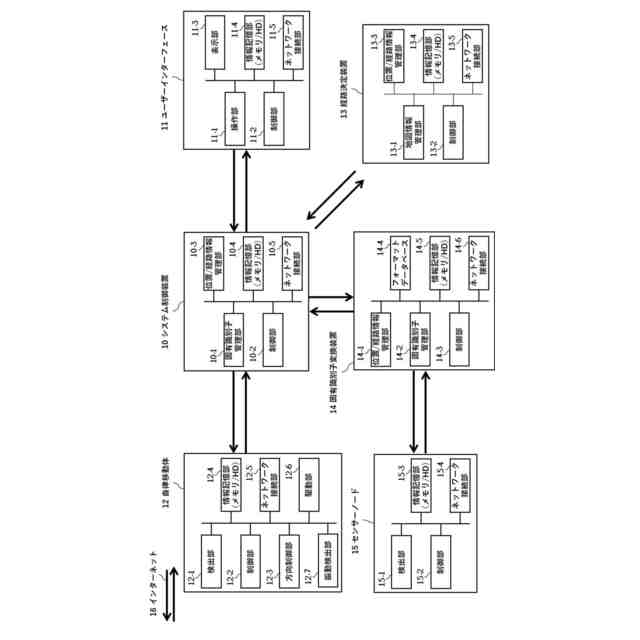
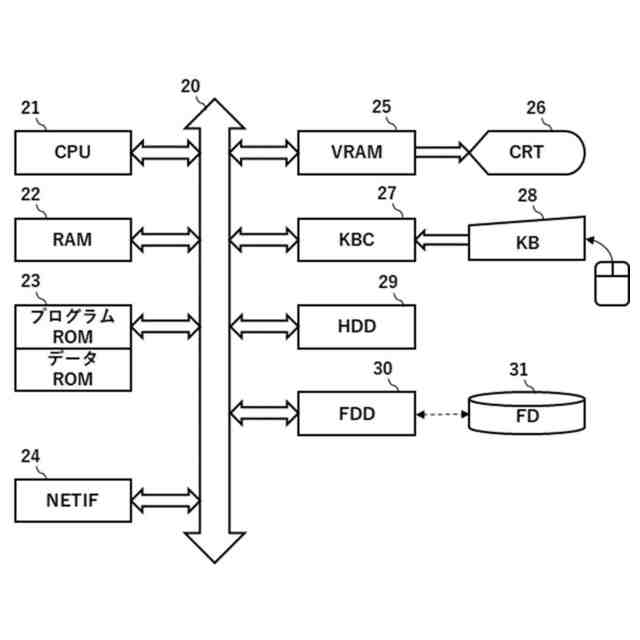
図1の各装置の内部構成のブロック図である。
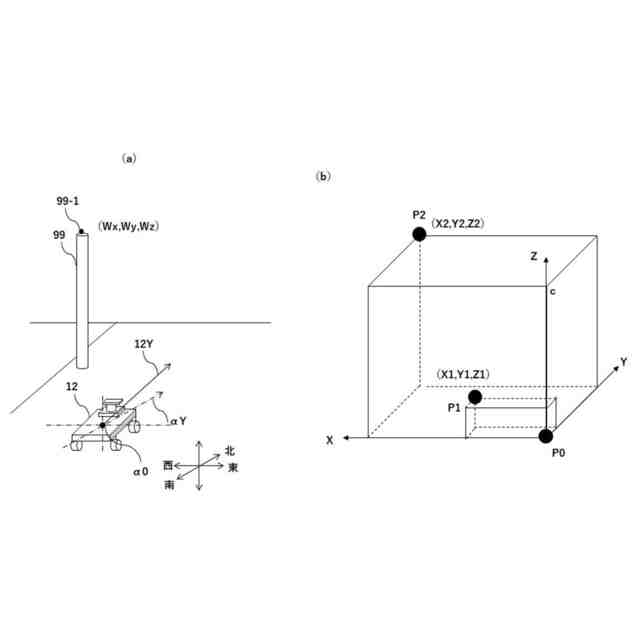
サイバー空間の三次元マップの説明図である。
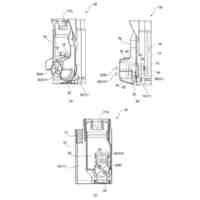
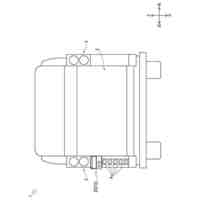
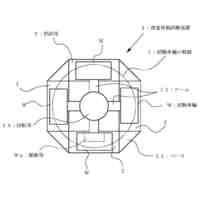
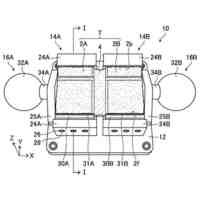
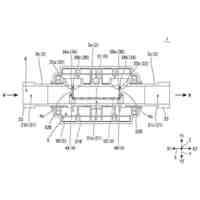
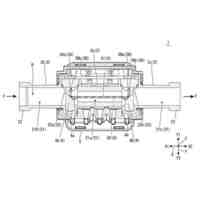
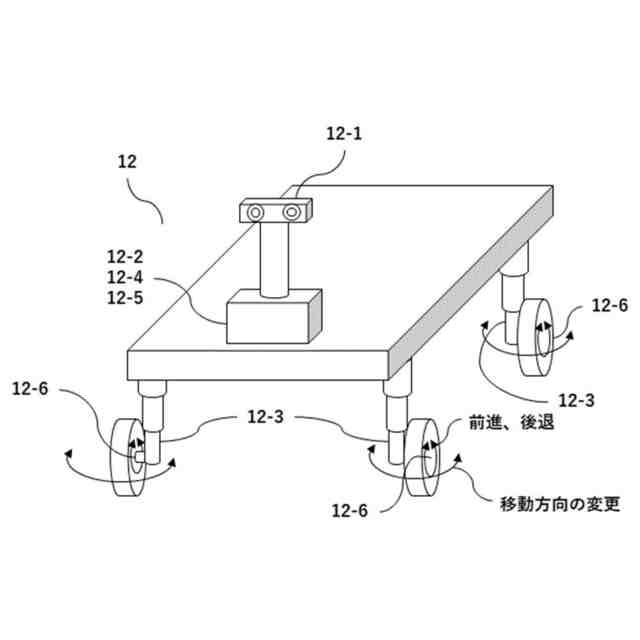
自律移動体のメカ的な構成を示す斜視図である。
各制御部の具体的な構成例を示すブロック図である。
自律移動体制御システムが実行する処理を示すシーケンス図である。
(a)地球の緯度/経度情報を示す図である。(b)所定の空間を示す斜視図である。
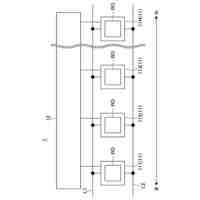
所定の空間内の空間情報を模式的に示す図である。
(a)経路情報を用いた経路情報を地図情報で表示したイメージ図である。(b)位置点群データを用いた経路情報を地図情報で表示したイメージ図である。(c)固有識別子を用いた経路情報を地図情報で表示したイメージ図である。
配達ロボットが料理を配達するビルを示すイメージ図である。
経路決定装置がルートを選定するシーケンスを説明する図である。
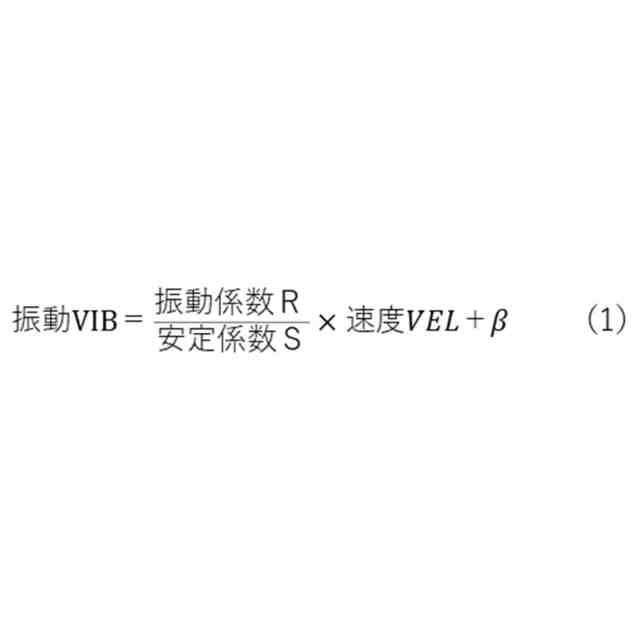
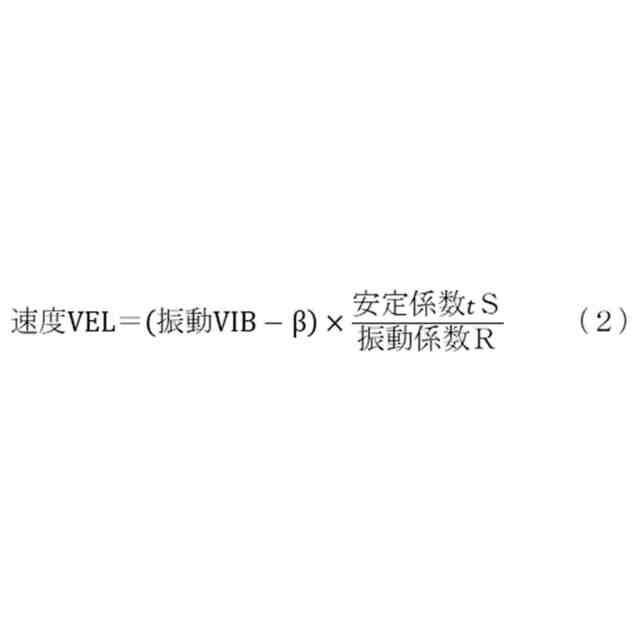
速度と振動の関係を説明する図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について、図面を参照しながら詳細に説明する。各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
<第1の実施形態>
1.自律移動体制御システムの構成概要
図1は、本発明の実施形態に係る自律移動体制御システムの全体構成を示す図である。自律移動体制御システムは、システム制御装置10、ユーザーインターフェース11、自律移動体12、経路決定装置(経路探索装置)13、固有識別子変換情報保持装置14、及びセンサーノード15を有する。各装置は、CPU、ROM、RAM、及びHDD等からなる情報処理装置(コンピュータ)により構成されている。また、各装置は、インターネット16を介して、後述するそれぞれのネットワーク接続部によって接続されている。なお、本実施形態ではインターネット16が用いられるが、本発明はこれに限定されない。例えば、LAN(Local Area Network)等の他のネットワークシステムが用いられてもよい。また、システム制御装置10、ユーザーインターフェース11、経路決定手段13、及び固有識別子変換情報保持装置14のうちいくつかを同一装置として構成してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
12日前
株式会社イシダ
計量装置
6日前
個人
アクセサリー型テスター
13日前
栄進化学株式会社
浸透探傷用濃縮液
19日前
株式会社ミツトヨ
画像測定機
14日前
東レ株式会社
シート状物の検査方法
27日前
エイブリック株式会社
電流検出回路
26日前
株式会社テイエルブイ
振動検出装置
12日前
ダイハツ工業株式会社
試料セル
12日前
トヨタ自動車株式会社
検査装置
6日前
株式会社チノー
放射光測温装置
26日前
大和製衡株式会社
計量装置
19日前
トヨタ自動車株式会社
電気自動車
13日前
日本特殊陶業株式会社
ガスセンサ
26日前
株式会社 キョーワ
食品搬送装置
26日前
日本特殊陶業株式会社
ガスセンサ
26日前
東ソー株式会社
簡易型液体クロマトグラフ
8日前
理研計器株式会社
ガス検出器
14日前
富士電機株式会社
エンコーダ
27日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
日本碍子株式会社
ガスセンサ
26日前
株式会社熊谷組
計測システム
19日前
大成建設株式会社
画像表示システム
22日前
株式会社 システムスクエア
検査装置
20日前
株式会社ニコン
検出装置
12日前
大和製衡株式会社
表示システム
4日前
リバークル株式会社
荷重移動試験装置
6日前
TDK株式会社
温度センサ
27日前
大和ハウス工業株式会社
引張装置
5日前
株式会社デンソー
試験装置
22日前
東洋計器株式会社
超音波式流量計
19日前
東洋計器株式会社
超音波式流量計
19日前
東洋計器株式会社
超音波式流量計
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ