TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025061438
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2025006824,2023061218
出願日
2025-01-17,2020-04-06
発明の名称
レーザ制御を伴うソリッドステートLIDAR送光機
出願人
オプシス テック リミテッド
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01S
7/484 20060101AFI20250403BHJP(測定;試験)
要約
【課題】レーザ制御を伴うソリッドステートLIDAR送光機の提供。
【解決手段】行列アドレス指定可能レーザ駆動回路を伴う、ソリッドステートLIDAR送光機は、第1の電圧電位を行列アドレス指定可能レーザ駆動回路の列に提供する、第1の電気バスと、第2の電圧電位を行列アドレス指定可能レーザ駆動回路の行に提供する、第2の電気バスとを含む。複数の列スイッチが、複数の列を第1の電気バスに接続する。複数の行スイッチが、複数の行を第2の電気バスに接続する。送光機は、レーザダイオードを別のダイオードと直列に備える、複数の一連の接続されたダイオードを含み、複数の一連の接続されたダイオードの個別のものは、行列アドレス指定可能レーザ駆動回路の個別の列と行との間に電気的に接続され、LIDAR送光機を形成する。第2のダイオードのうちの少なくともいくつかは、一連の接続されたダイオードの全体的逆絶縁破壊電圧を増加させる。
【選択図】なし
特許請求の範囲
【請求項1】
本願図面に記載の発明。
発明の詳細な説明
【技術分野】
【0001】
本明細書で使用される見出しは、編成目的のみのためのものであって、いかようにも本願に説明される主題の限定として解釈されるべきではない。
(関連出願の相互参照)
続きを表示(約 4,500 文字)
【0002】
本願は、2019年4月9日に出願され、「Solid-State LIDAR Transmitter with Laser Control」と題された、米国仮特許出願第62/831,668号の非仮特許出願である。米国仮特許出願第62/831,668号の全内容は、参照することによって本明細書に組み込まれる。
【背景技術】
【0003】
自律、自動運転、および半自律自動車は、周囲の物体の検出および位置特定のために、レーダ、画像認識カメラ、および超音波変換器等の異なるセンサおよび技術の組み合わせを使用する。これらのセンサは、衝突警告、自動緊急制動、車線逸脱警告、車線逸脱防止支援、適応クルーズ制御、およびパイロット運転を含む、運転者の安全性における一連の改良を可能にする。これらのセンサ技術のうち、光検出および測距(LIDAR)システムは、周囲環境のリアルタイム高分解能3次元マッピングを可能にする、重要な役割を果たす。
【発明の概要】
【課題を解決するための手段】
【0004】
本教示は、ここで、付随の図面に示されるようなその例示的実施形態を参照して、さらに詳細に説明されるであろう。本教示は、種々の実施形態および実施例と併せて説明されるが、本教示がそのような実施形態に限定されることを意図するものではない。対照的に、本教示は、当業者によって理解されるであろうように、種々の代替、修正、および均等物を包含する。本明細書の教示へのアクセスを有する、当業者は、本明細書に説明されるような本開示の範囲内である、付加的実装、修正、および実施形態、および他の使用分野を認識するであろう。
【0005】
本明細書における「一実施形態」または「ある実施形態」の言及は、実施形態に関連して説明される特定の特徴、構造、または特性が、本教示の少なくとも一実施形態に含まれることを意味する。本明細書の種々の場所における語句「一実施形態では」の表出は、必ずしも、全て同一実施形態を参照するわけではない。
【0006】
本教示の方法の個々のステップは、本教示が動作可能のままである限り、任意の順序で、および/または同時に、実施されることができることを理解されたい。さらに、本教示の装置および方法は、本教示が動作可能のままである限り、説明される実施形態の任意の数または全てを含むことができることを理解されたい。
【0007】
自律車両のために使用される市販のLIDARシステムの大部分は、今日、環境を機械的に走査するいくつかの方法と組み合わせられた少数のレーザを利用する。現在の自動車用途および将来的自律自動車用途にとって、ソリッドステート半導体ベースのLIDARシステムを利用することが非常に望ましい。ソリッドステートLIDARシステム、特に、可動部品を伴わないものは、現在のLIDARシステムと比較して、より優れた信頼性を呈し、より広い環境動作範囲にわたって動作することができる。LIDARシステムにおいて使用するためのそのようなソリッドステートシステムはまた、物理的にコンパクトであって、比較的に低コストであることができる。
【0008】
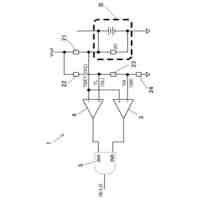
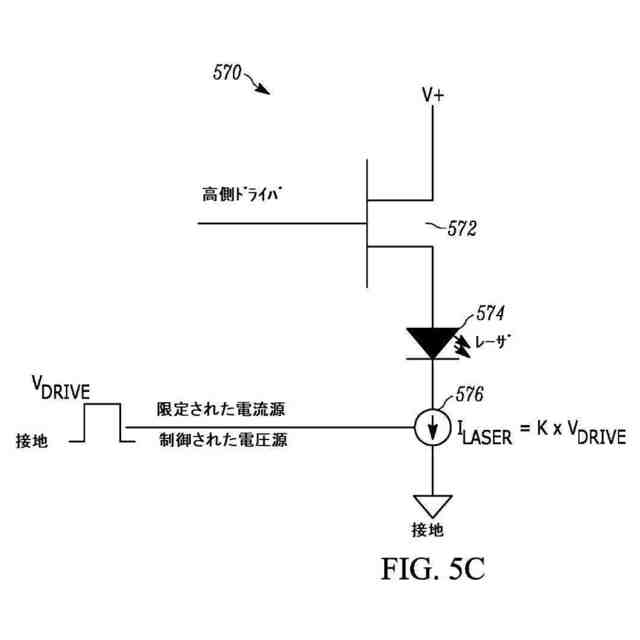
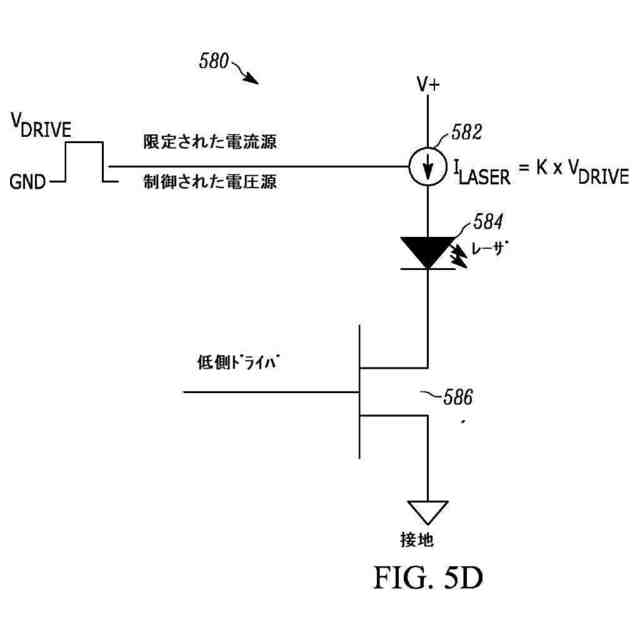
ソリッドステートLIDARの1つのアプローチは、所望のFOVにわたって、各レーザを一意の角度で投影させる、多数のレーザを使用し、それによって、機械的走査の必要性を回避することである。しかしながら、それらを個々に動作させる能力を留保しながら、ドライバ回路を多数のレーザに電気的に接続することは、課題である。1つの解決策は、複数のレーザを2D行列の中に配列し、次いで、アレイ内の個々および/または群のレーザを制御し、最適電気特性(例えば、電流、電圧、およびタイミング)を提供し、レーザを活性化させる必要性を同時に満たし得る、行列アドレス指定可能レーザ駆動回路を採用することである。本教示の方法および装置は、低コストシステムを確実にしながら、レーザの2D行列の個々の制御を可能にする、レーザ制御方法およびシステムアーキテクチャに関する。
本発明は、例えば、以下を提供する。
(項目1)
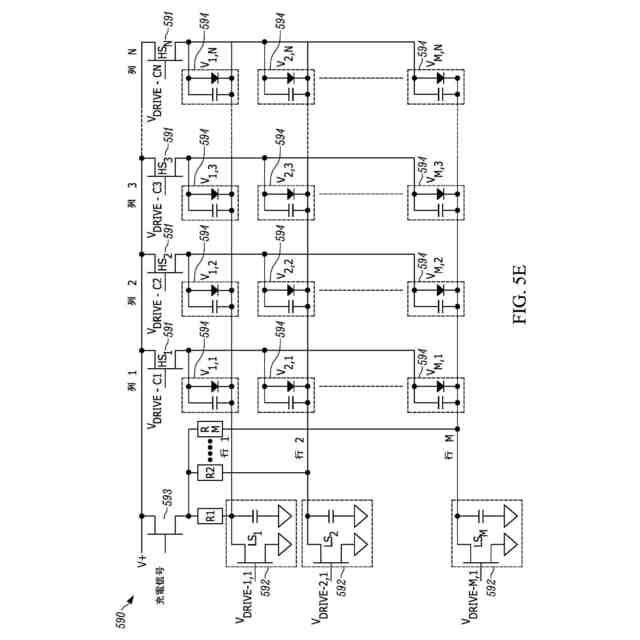
行列アドレス指定可能レーザ駆動回路を伴うソリッドステート光検出および測距(LIDAR)送光機であって、前記LIDAR送光機は、
a)第1の電圧電位を前記行列アドレス指定可能レーザ駆動回路の列に提供する第1の電気バスと、
b)第2の電圧電位を前記行列アドレス指定可能レーザ駆動回路の行に提供する第2の電気バスと、
c)複数の列スイッチであって、前記複数の列スイッチはそれぞれ、前記複数の列のうちの1つを前記第1の電気バスに接続する、複数の列スイッチと、
d)複数の行スイッチであって、前記複数の行スイッチはそれぞれ、前記複数の行のうちの1つを前記第2の電気バスに接続する、複数の行スイッチと、
e)第2のダイオードと電気的に直列に接続されたレーザダイオードを備える複数の一連の接続されたダイオードであって、前記複数の一連の接続されたダイオードの個別のものは、前記行列アドレス指定可能レーザ駆動回路の個別の列と個別の行との間に電気的に接続され、前記LIDAR送光機を形成し、前記第2のダイオードのうちの少なくともいくつかは、前記一連の接続されたダイオードの全体的逆絶縁破壊電圧を増加させ、それによって、前記LIDAR送光機が活性化されるとき、光学クロストークを低減させる、複数の一連の接続されたダイオードと
を備える、LIDAR送光機。
(項目2)
前記第2のダイオードのうちの少なくともいくつかは、関連付けられるレーザダイオードの明るさを増加させる光学利得を発生させるアクティブP-N接合部を備える、項目1に記載のソリッドステートLIDAR送光機。
(項目3)
前記第2のダイオードのうちの少なくともいくつかは、光学利得を発生させない、項目1に記載のソリッドステートLIDAR送光機。
(項目4)
前記第2のダイオードのうちの少なくともいくつかは、フォトダイオードである、項目1に記載のソリッドステートLIDAR送光機。
(項目5)
前記第2のダイオードのうちの少なくともいくつかは、前記レーザダイオードとモノリシックに統合される、項目1に記載のソリッドステートLIDAR送光機。
(項目6)
前記第2のダイオードのうちの少なくともいくつかは、前記レーザダイオードの基板と別個である基板上に位置付けられる、項目1に記載のソリッドステートLIDAR送光機。
(項目7)
前記複数の一連の接続されたダイオードのうちの少なくともいくつかは、前記第1および第2の電気バスによって提供される最大駆動電圧の絶対値を超える全体的逆絶縁破壊電圧を有するように構成される、項目1に記載のソリッドステートLIDAR送光機。
(項目8)
前記レーザダイオードのうちの少なくともいくつかは、直列に接続された少なくとも2つの開口を備える、項目1に記載のソリッドステートLIDAR送光機。
(項目9)
前記レーザダイオードのうちの少なくともいくつかは、トンネル接合部によって分離された少なくとも2つのアクティブ領域を備える、項目1に記載のソリッドステートLIDAR送光機。
(項目10)
前記レーザダイオードのうちの少なくともいくつかは、面発光レーザダイオードを備える、項目1に記載のソリッドステートLIDAR送光機。
(項目11)
前記レーザダイオードのうちの少なくともいくつかは、垂直共振器面発光レーザダイオードを備える、項目1に記載のソリッドステートLIDAR送光機。
(項目12)
前記第1の電気バスは、正の電圧を前記レーザダイオードのアノードに提供するように構成される、項目1に記載のソリッドステートLIDAR送光機。
(項目13)
前記第2の電気バスは、接地電位を前記レーザダイオードのカソードに提供するように構成される、項目1に記載のソリッドステートLIDAR送光機。
(項目14)
前記複数の列スイッチおよび前記複数の行スイッチのうちの少なくともいくつかは、トランジスタを備える、項目1に記載のソリッドステートLIDAR送光機。
(項目15)
前記複数の列スイッチおよび前記複数の行スイッチのうちの少なくともいくつかは、非対称オン-オフドライバ回路を備える、項目1に記載のソリッドステートLIDAR送光機。
(項目16)
前記非対称オン-オフドライバ回路は、GaN FETドライバ回路を備える、項目15に記載のソリッドステートLIDAR送光機。
(項目17)
前記複数の列スイッチのうちの少なくともいくつかおよび前記複数の行スイッチのうちの少なくともいくつかは、拡張MOSFET電力トランジスタを備える、項目1に記載のソリッドステートLIDAR送光機。
(項目18)
前記複数の列スイッチのうちの少なくともいくつかおよび前記複数の行スイッチのうちの少なくともいくつかは、GaN電力トランジスタを備える、項目1に記載のソリッドステートLIDAR送光機。
(項目19)
前記レーザダイオードのうちの少なくともいくつかは、830nm~1000nmの光学放射を発光するように構成される、項目1に記載のソリッドステートLIDAR送光機。
(項目20)
前記複数の行の数は、前記複数の列の数と同一である、項目1に記載のソリッドステートLIDAR送光機。
(項目21)
前記複数の行の数は、前記複数の列の数に等しくない、項目1に記載のソリッドステートLIDAR送光機。
【図面の簡単な説明】
【0009】
好ましいおよび例示的実施形態による、本教示が、そのさらなる利点とともに、付随の図面と関連して検討される以下の詳細な説明により具体的に説明される。当業者は、下記に説明される図面が、例証目的のためだけのものであることを理解するであろう。図面が、必ずしも、正確な縮尺ではなく、強調が、代わりに、概して、本教示の原理を図示することに応じて置かれている。図面は、いかようにも本出願人の教示の範囲を限定することを意図するものではない。
【0010】
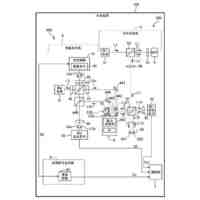
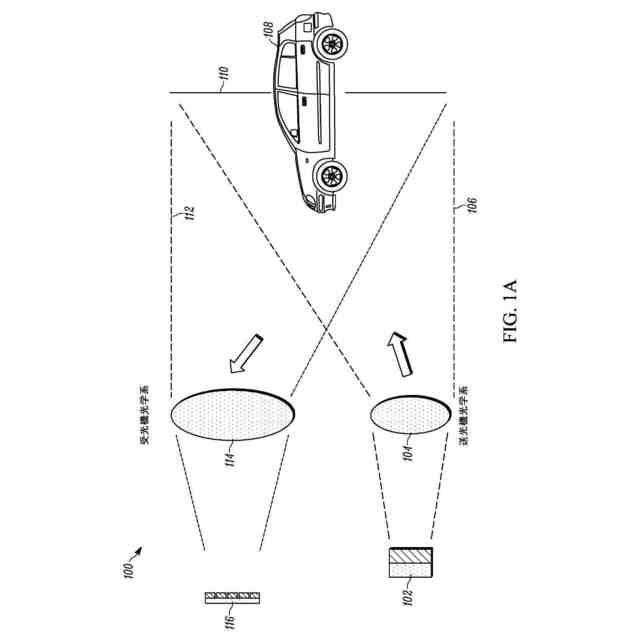
図1Aは、ソリッドステートLIDARシステムの概略図を図示する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
10日前
日本精機株式会社
位置検出装置
6日前
株式会社ハシマ
検針機
9日前
東レ株式会社
シート状物の検査方法
4日前
エイブリック株式会社
電流検出回路
3日前
株式会社チノー
放射光測温装置
3日前
東ソー株式会社
自動分析装置及び方法
6日前
日本特殊陶業株式会社
ガスセンサ
3日前
株式会社 キョーワ
食品搬送装置
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
富士電機株式会社
エンコーダ
4日前
日本碍子株式会社
ガスセンサ
3日前
TDK株式会社
温度センサ
4日前
株式会社ヨコオ
シートコンタクタ
6日前
本田技研工業株式会社
物体検出装置
9日前
ダイハツ工業株式会社
凹部の深さ測定方法
9日前
本田技研工業株式会社
物体検出装置
9日前
オムロン株式会社
光電センサ
3日前
スタンレー電気株式会社
車両前方視認装置
9日前
スタンレー電気株式会社
車両前方視認装置
9日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
株式会社ミツバ
モータ制御装置
3日前
旭光電機株式会社
電気的特性提供装置
3日前
TDK株式会社
センサデバイス
3日前
JRCモビリティ株式会社
充電用温度判定回路
6日前
セイコーエプソン株式会社
干渉計
6日前
日本信号株式会社
表示装置
4日前
内山工業株式会社
分析装置用部材
5日前
株式会社JVCケンウッド
撮像装置及び測距方法
9日前
TDK株式会社
センサ
4日前
株式会社オーケープランニング
スパン調整法
3日前
日東建設株式会社
ボルト・ナットの健全性検査装置
9日前
浜松ホトニクス株式会社
分光計測装置
10日前
株式会社SUBARU
蓄電池の状態センサ装置
6日前
大陽日酸株式会社
試験体の熱特性を測定する試験装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ