TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025060305
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170973
出願日
2023-09-29
発明の名称
テラヘルツ波を用いた計測装置及び計測方法
出願人
株式会社トプコン
代理人
弁理士法人あお葉国際特許事務所
主分類
G01B
15/00 20060101AFI20250403BHJP(測定;試験)
要約
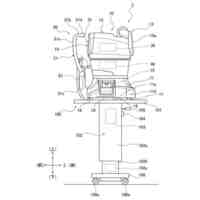
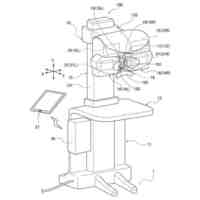
【課題】自由に移動しながら計測できるとともに、複数回にわたって計測した結果全部を視覚的に同時に確認できるテラヘルツ波計測装置及び計測方法を提供する。
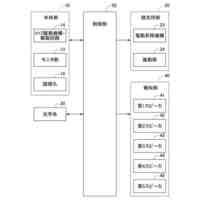
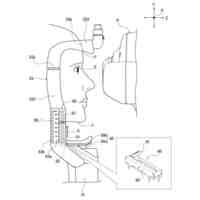
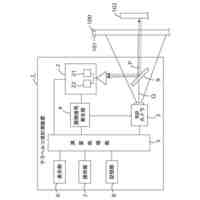
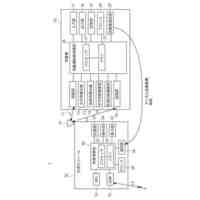
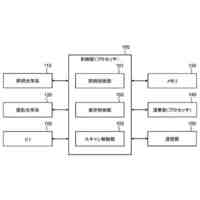
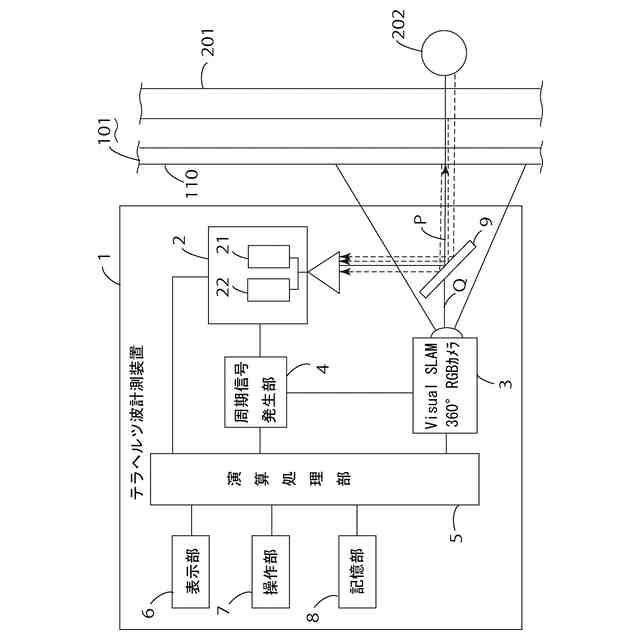
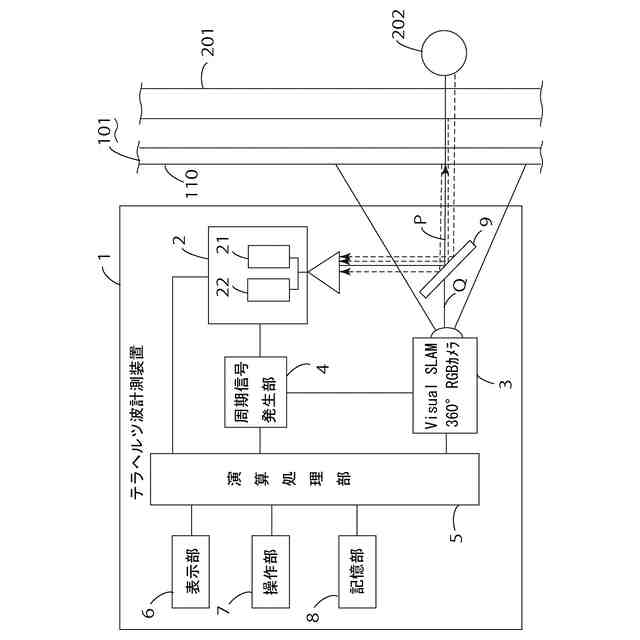
【解決手段】計測対象物101に照射するテラヘルツ波を生成して出力するとともに、反射されて入力したテラヘルツ波を検出するテラヘルツ波計測器2と、移動しながら撮影するRGBカメラを有するSLAM処理器3と、演算処理部5と、表示部6を一つのケースに収容し、テラヘルツ波測定器2のテラヘルツ波を計測対象物101に照射する光軸中心Pと、RGBカメラの光軸中心Qは一致し、演算処理部5は、テラヘルツ波計測器2からのテラヘルツ波検出信号とSLAM処理器3からの計測データ信号が入力され、同期する両信号から得たデータが点群データでない場合は点群データ化し、これら点群データを同一座標系上に表示した表示画像を生成して表示部6に表示する。
【選択図】 図1
特許請求の範囲
【請求項1】
テラヘルツ波を生成して出力するとともに、反射されて入力したテラヘルツ波を検出するテラヘルツ波計測器と、カメラを有するSLAM処理器と、演算処理部と、表示部とを備え、
少なくとも前記表示部以外を一つのケースに収容し、
前記テラヘルツ波計測器のテラヘルツ波を計測対象物に向けて照射する光軸中心と、前記カメラの光軸中心は一致するものであり、
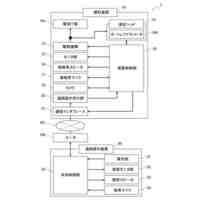
前記演算処理部は、前記テラヘルツ波計測器からのテラヘルツ波検出信号と前記SLAM処理器からの計測データ信号が入力され、同期する前記両信号から得たデータが点群データでない場合は点群データ化し、これら点群データを同一座標系上に表示した表示画像を生成し、この表示画像を前記表示部に表示する
ことを特徴とするテラヘルツ波を用いた計測装置。
続きを表示(約 760 文字)
【請求項2】
前記SLAM処理器のカメラは360度RGBカメラである
ことを特徴とする請求項1に記載のテラヘルツ波を用いた計測装置。
【請求項3】
前記テラヘルツ波計測器からのテラヘルツ波検出信号と前記SLAM処理器からの計測データ信号の同期は、前記ケース内に設けた前記テラヘルツ波測定器と前記SLAM処理器に同期信号を送出する同期信号発生部で行う
ことを特徴とする請求項1または請求項2に記載のテラヘルツ波を用いた計測装置。
【請求項4】
前記テラヘルツ波計測器からのテラヘルツ波検出信号と前記SLAM処理器からの計測データ信号の同期は、前記演算処理部において、同時刻に入力したテラヘルツ波検出信号と計測データ信号とに対して行うよう構成した
ことを特徴とする請求項1または請求項2に記載のテラヘルツ波を用いた計測装置。
【請求項5】
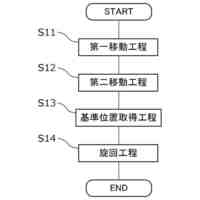
テラヘルツ波を生成して出力するとともに、反射されて入力したテラヘルツ波を検出するテラヘルツ波計測器と、カメラを有するSLAM処理器と、演算処理部と、表示部とを備え、少なくとも前記表示部以外を一つのケースに収容したテラヘルツ波計測装置を用いた計測方法であって、
前記テラヘルツ波計測器のテラヘルツ波を計測対象物に照射する光軸中心と、前記カメラの光軸中心は一致するようになし、
前記演算処理部で、前記テラヘルツ波計測器から入力したテラヘルツ波検出信号と前記SLAM処理器から入力した計測データ信号で同期する前記両信号から得たデータを点群データ化し、これら点群データを同一座標系上に表示した表示画像を生成し、この表示画像を前記表示部に表示する
ことを特徴とするテラヘルツ波を用いた計測方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、テラヘルツ波を用いた計測装置及び計測方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
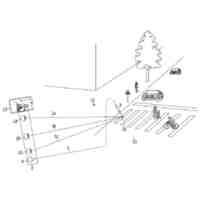
周波数がおおよそ0.1THz~10THzの電磁波であるテラヘルツ波は、プラスチックや紙、布、セラミック、石膏などの材料に対して高い透過性を示すため、これらの材料で隠された対象物に対しテラヘルツ波を照射し、透過あるいは反射波を検出することで、前記対象物を可視化することができる。例えば建築構造物の壁の内部や天井の裏にある、人の目では視認不能な内部構造物を可視化することができる。また、可視光が透過しにくい前記材料の厚さを測定することができる。そして、この種のテラヘルツ波を用いた計測装置(以下「テラヘルツ波計測装置」という。)は、従来から様々な構成のものが知られている。
【0003】
例えば、特許文献1には、テラヘルツ発生装置によって構成される10GHzから10THzの発振周波数を持つ電磁波発生源を用い、発振周波数の異なる複数の発振素子を組み合わせ、あるいは複数の検出器を用い、建造物に発生電磁波を照射しその透過あるいは反射画像を得ることによって、建造物の表面および内部の欠陥分布のイメージングを可能にした検査システムが記載されている。前記異なる発振周波数の発振素子を有する二つのプローブは、同一の駆動機構でX―Y方向の走査を行い、焦点深度方向の調整は前記駆動機構とは別の同一の駆動機構によって行う。
【0004】
また例えば、特許文献2には、サンプルの厚さを測定することができるテラヘルツ波を用いたリアルタイム非接触非破壊厚さ測定装置が記載されている。この測定装置は、波長固定レーザと波長掃引レーザをカプラーに入力し、形成した混合光をテラヘルツ波を発生する発生器に入力し、発生器から放出されてサンプルを透過または反射したテラヘルツ波を検出器に入力し、検出器は混合光によって励起される光キャリアをテラヘルツ波の電場によってバイアスして光電流を生成し、光電流をデータ取得部がデジタルデータの形態で取得し、これを演算部に出力して周波数領域データに変換し、この周波数領域データを高速フーリエ変換して時間領域データを生成し、この時間領域データに基づいてサンプルの厚さを演算するものである。この特許文献2には、前記測定装置を移動しながら測定対象物であるサンプルの厚さを測定することは記載されていない。
【先行技術文献】
【特許文献】
【0005】
特開2007-132915号
特開2017-15681号
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した従来の検査システムあるいは測定装置では、一回の走査で測定可能な測定対象物の大きさが、駆動系で移動可能な範囲、すなわち位置/角度座標が取得可能な範囲に限られるという問題がある。また、複数回の走査を行う場合には、その都度、プローブあるいは測定装置の設置位置を変更しなければならず、この設置変更作業の負担が大きいという問題がある。さらに、広い範囲に及ぶ視認不能な内部構造物の全体的な配置状態を確認することが困難なので、内部構造物の改修工事や追加配置工事を、円滑かつ確実に行うことができないという問題もある。
【0007】
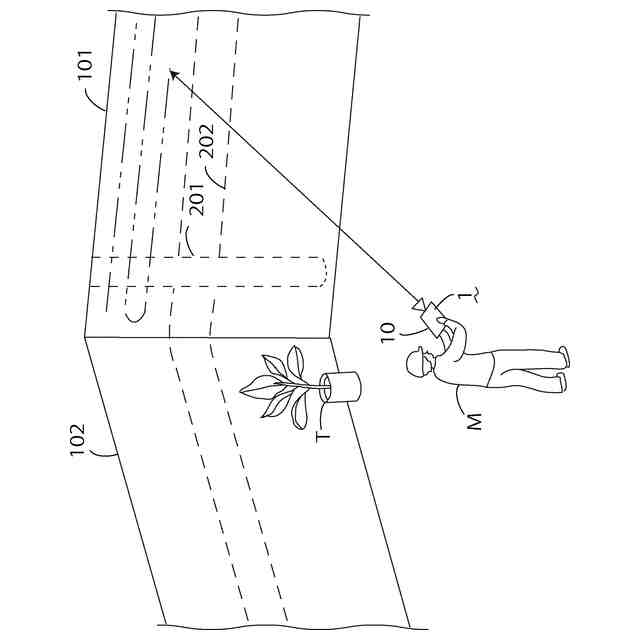
本発明は、上述した各問題を解決したもので、自由に移動しながら計測できるとともに、一回の計測結果はもちろん、複数回にわたって計測した結果全部を画像化して、計測対象物と内部構造物を視覚的に同時に確認できるテラヘルツ波計測装置及びテラヘルツ波計測方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
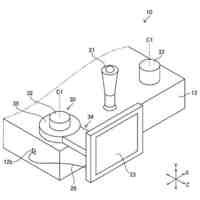
上記目的を達成するため、本発明に係るテラヘルツ波計測装置の第1の態様は、可視光では不透明な計測対象物に照射するテラヘルツ波を生成して出力するとともに、前記計測対象物及び内部構造物で反射されて入力したテラヘルツ波を検出するテラヘルツ波計測器と、カメラを有するSLAM(Simultaneous Localization and Mapping)処理器と、演算処理部と、表示部とを備え、少なくとも前記表示部以外を一つのケースに収容し、前記テラヘルツ波計測器のテラヘルツ波を出力する、すなわち前記計測対象物にテラヘルツ波を照射する光軸中心と、前記カメラの光軸中心は一致するものであり、前記演算処理部は、前記テラヘルツ波計測器からのテラヘルツ波検出信号と前記SLAM処理器からの計測データ信号が入力され、同期する前記両信号から得たデータを点群データ化し、これら点群データを同一座標系上に表示した表示画像を生成し、この表示画像を前記表示部に表示するものである。
【0009】
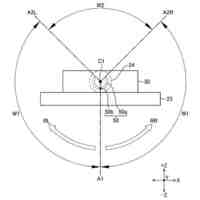
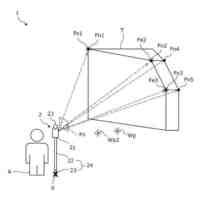
前記SLAM処理器は、カメラを有するVisual SLAMであり、前記カメラを移動させながら画像を撮影し、複数の撮影画像に含まれる特徴点の軌跡を解析することで、特徴点の3次元位置を推定するとともに、前記カメラの位置姿勢を推定することが可能となり、また、特徴点の3次元情報を用いて周囲の地図を作成することができる。この自己位置姿勢推定と地図作成を同時に行う処理によって、前記SLAM処理器と同一ケース内の前記テラヘルツ波測定器の前記計測対象物に対する位置姿勢と移動状態を把握することができる。前記SLAM処理器は、内部に独自の演算処理部を備え、この演算処理部で前記カメラの画像データを処理し、点群データ化しても良い。
【0010】
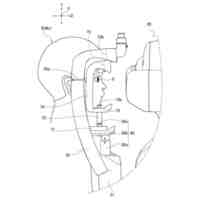
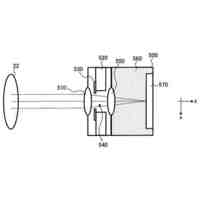
前記テラヘルツ波測定器のテラヘルツ波を前記計測対象物に照射する光軸中心と、前記カメラの光軸中心は一致している。この光軸中心の一致は、例えばビームスプリッターを用いることで実現できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社トプコン
眼科装置
12日前
株式会社トプコン
眼科装置
4日前
株式会社トプコン
眼科装置
5日前
株式会社トプコン
眼科装置
5日前
株式会社トプコン
眼科装置
4日前
株式会社トプコン
眼科装置
4日前
株式会社トプコン
眼科装置
4日前
株式会社トプコン
眼科システム
9日前
株式会社トプコン
眼科装置、顎受けアタッチメント
10日前
株式会社トプコン
眼科装置の制御方法及び眼科装置
4日前
株式会社トプコン
眼科装置及び顎受け高さ制御方法
4日前
株式会社トプコン
眼科装置及び顎受け高さ制御方法
4日前
株式会社トプコン
眼科装置の制御方法及び眼科装置
5日前
株式会社トプコン
テラヘルツ波を用いた計測装置及び計測方法
3日前
株式会社トプコン
測量方法、測量システム及び測量プログラム
3日前
株式会社トプコン
テラヘルツ波を用いた計測装置及び計測方法
3日前
株式会社トプコン
3次元データ計測システムおよび3次元データ計測方法
3日前
株式会社トプコン
模型眼
3日前
株式会社トプコン
測量装置、測量システム、測量方法及び測量プログラム
5日前
株式会社トプコン
計測モジュールおよびこれを用いた3次元データ計測システム
3日前
株式会社トプコン
光コヒーレンストモグラフィ装置、その制御方法、及びプログラム
5日前
株式会社トプコン
光コヒーレンストモグラフィ装置、その制御方法、及びプログラム
5日前
株式会社トプコン
作業現場において作業員の作業を補助するガイドシステム、ガイド方法、及びガイドプログラム
3日前
株式会社トプコン
眼科装置、眼科装置の制御方法、及びプログラム
2日前
株式会社トプコン
眼科装置、眼科システム、眼科装置の制御条件の決定方法、眼科装置のキャリブレーション方法、プログラム、及び記録媒体
12日前
個人
通電検査装置
10日前
個人
光フアィバー距離計測器
12日前
個人
光フアィバー距離計測器
12日前
日本精機株式会社
位置検出装置
6日前
株式会社ハシマ
検針機
9日前
東レ株式会社
シート状物の検査方法
4日前
エイブリック株式会社
電流検出回路
3日前
東ソー株式会社
自動分析装置及び方法
6日前
株式会社チノー
放射光測温装置
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ