TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059987
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170443
出願日
2023-09-29
発明の名称
計測モジュールおよびこれを用いた3次元データ計測システム
出願人
株式会社トプコン
代理人
弁理士法人あお葉国際特許事務所
主分類
G01C
7/04 20060101AFI20250403BHJP(測定;試験)
要約
【課題】プリズム付きポールを用いずに3次元データの計測を可能とする新たな計測モジュールおよび新たな3次元データ計測システムを提供する。
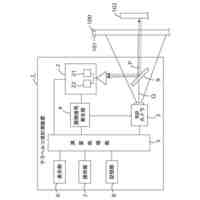
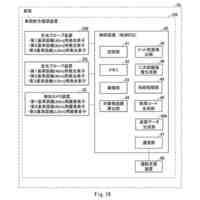
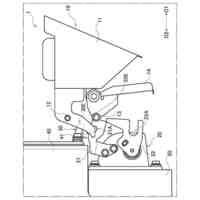
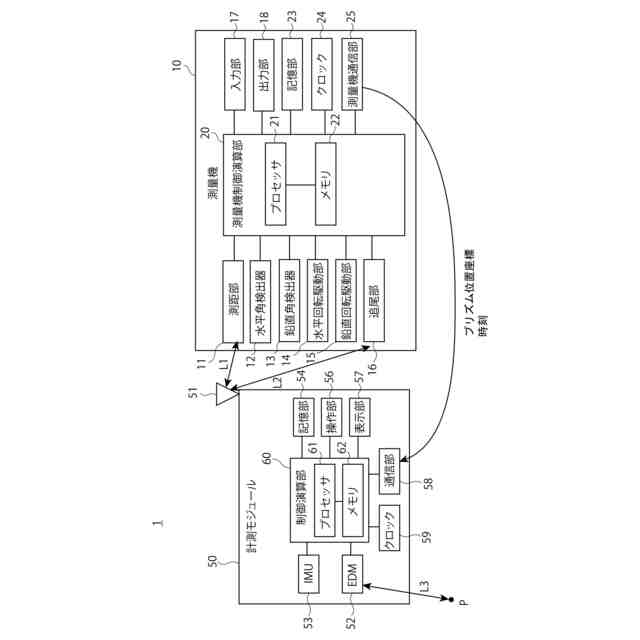
【解決手段】3次元データ計測システム1は、プリズム51と、光波距離計52と、慣性計測装置53と、プリズムの位置座標を取得する通信部58と、少なくとも1つのプロセッサ60とを備え、プロセッサ60は、プリズム51の位置座標および姿勢情報に基いて、自位置の位置座標を算出し、自位置の位置座標、照射点までの距離、および姿勢情報に基づいて、照射点の位置座標を算出するように構成された計測モジュール50であって、プロセッサ60は、照射点が、計測領域のデータにおける計測範囲に設定された計測予定点の周囲に所定の閾値で設定された計測予定点範囲に入ったことを判定して、測定を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
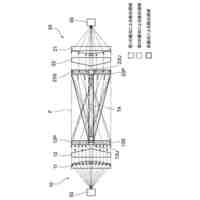
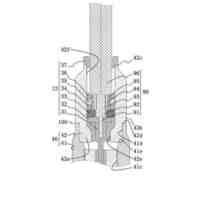
入射した光を再帰反射するプリズムと、
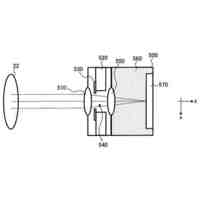
計測範囲に測距光を送出し、前記測距光の照射点から反射される反射測距光を受光することにより、前記照射点までの距離を検出する光波距離計と、
3次元の加速度および角速度を計測し、姿勢情報を検出する慣性計測装置と、
前記プリズムの位置座標を取得する通信部と、
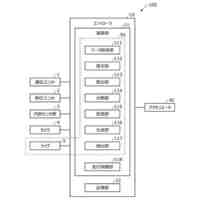
少なくとも1つのプロセッサとを備え、
前記プロセッサは、前記プリズムの位置座標および前記姿勢情報に基いて、自位置の位置座標を算出し、
前記自位置の位置座標、前記照射点までの距離、および前記姿勢情報に基づいて、前記照射点の位置座標を算出するように構成された計測モジュールであって、
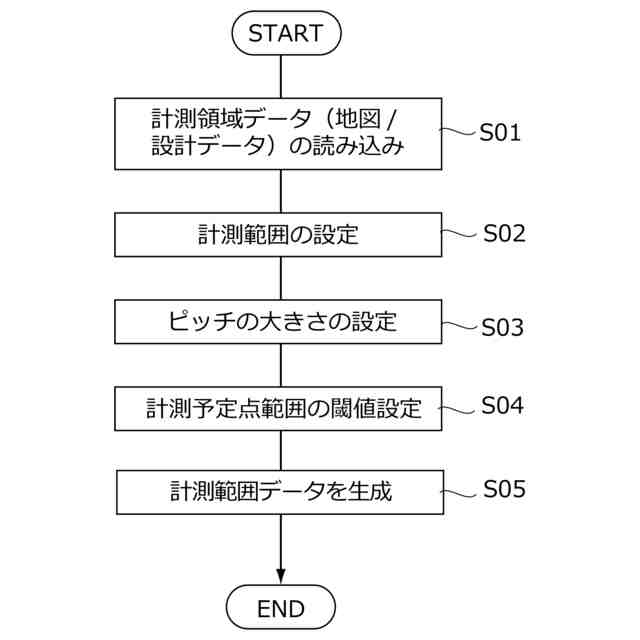
前記プロセッサは、前記照射点が、計測領域のデータにおける前記計測範囲に設定された計測予定点の周囲に所定の閾値で設定された計測予定点範囲に入ったことを判定して、測定を実行することを特徴とする計測モジュール。
続きを表示(約 1,000 文字)
【請求項2】
前記計測範囲は、メッシュ状に区画され、
前記計測予定点は、各メッシュに設定されていることを特徴とする請求項1に記載の計測モジュール。
【請求項3】
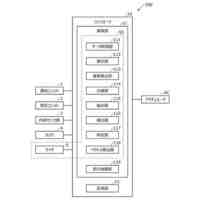
前記計測範囲の測定状況を示す計測画面を表示する表示部をさらに備え、
前記表示部は、前記メッシュごとの測定の進行状況をリアルタイムに識別可能に表示することを特徴とする請求項2に記載の計測モジュール。
【請求項4】
前記計測画面は、前記メッシュの測定結果に基づいて、測定済みの前記メッシュを、高さに応じて異なる色に塗り分けたカラースケールで表示することを特徴とする請求項3に記載の計測モジュール。
【請求項5】
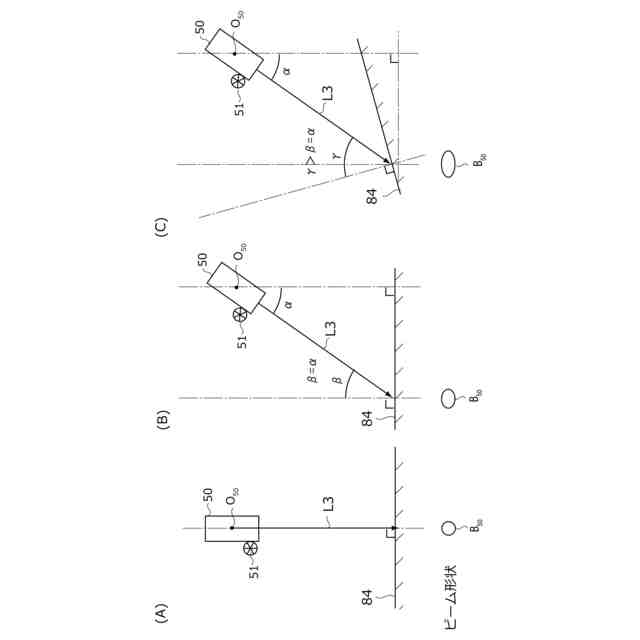
前記プロセッサは、前記姿勢情報に基づいて、前記測距光の計測面への入射角を算出し、前記入射角が、要求精度を満たす範囲にあることを判定して、測定を実行することを特徴とする請求項1に記載の計測モジュール。
【請求項6】
前記プロセッサは、前記姿勢情報に基づいて、前記測距光の計測面への入射角を算出し、前記入射角が、要求精度を満たす範囲にないことを判定して、その旨を作業者に報知することを特徴とする請求項1に記載の計測モジュール。
【請求項7】
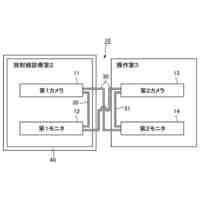
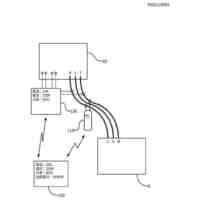
少なくとも前記プリズムと、前記光波距離計と、前記慣性計測装置と、少なくとも1つのプロセッサとで構成される計測モジュール本体と、
少なくとも1つのプロセッサと、表示部とを備え、前記計測モジュール本体と通信可能な計測モジュールコントローラと、で構成され、
前記計測モジュール本体は、移動体に取り付けられており、
前記移動体は、前記計測モジュールコントローラの前記プロセッサにより、遠隔操作可能となっている
ことを特徴とする請求項1に記載の計測モジュール。
【請求項8】
請求項1~7の何れかに記載の計測モジュールと、
前記プリズムを自動追尾する自動追尾機能を有し、
測距光を前記プリズムに送出し、反射測距光を受光して、前記プリズムを測距測角して、前記プリズムの位置座標を算出し、
通信部を備えて、前記通信部を介して、前記プリズムの位置座標を前記計測モジュールに出力する測量機と、
を備えることを特徴とする3次元データ計測システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、3次元データ計測システムに係り、より詳細には、プリズムを備える計測モジュールおよび該モジュールと測量機とを用いる3次元データ計測システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、建設工事における現況面計測では、自動追尾機能を有するトータルステーションと、プリズムを取り付けたポールとを備える3次元データ計測システムが用いられている。このようなシステムでは、作業者がポールを測定点上に設置して、トータルステーションに自動追尾させながらプリズムを測定させる。この時、作業者は、気泡管を目視で確認してプリズムの水平を確保しながら測定を行う必要があり、作業が長時間になると作業者への負担が大きかった。また、使用するポールの長さを事前に計測して、システムにその値を入力しなくてはならなかった。
【0003】
そこで、近年では、GNSS受信機、傾斜センサ、方位センサ、光波距離計を備えることで、ポールを用いずに、光波距離計の照射点の3次元位置情報を計測することが可能な、3次元データ計測システムが開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特開2007-248156号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の3次元データ計測システムでは、ポール不要の計測が可能であるが、衛星からの電波が受信困難な屋内の環境では、計測ができない。また、衛星からの電波が受信可能な屋外の環境であっても、計測する時間帯(衛星の数、衛星の幾何学的配置)の違いにより測定精度が劣化する、という問題があった。
【0006】
本発明は、係る事情を鑑みてなされたものであり、プリズム付きポールを用いずに3次元データの計測を可能とする新たな計測モジュールおよび新たな3次元データ計測システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の1つの態様に係る計測モジュールは、以下の構成を備える。
1.入射した光を再帰反射するプリズムと、計測範囲に測距光を送出し、前記測距光の照射点から反射される反射測距光を受光することにより、前記照射点までの距離を検出する光波距離計と、3次元の加速度および角速度を計測し、姿勢情報を検出する慣性計測装置と、前記プリズムの位置座標を取得する通信部と、少なくとも1つのプロセッサとを備え、前記プロセッサは、前記プリズムの位置座標および前記姿勢情報に基いて、自位置の位置座標を算出し、前記自位置の位置座標、前記照射点までの距離、および前記姿勢情報に基づいて、前記照射点の位置座標を算出するように構成された計測モジュールであって、前記プロセッサは、前記照射点が、計測領域のデータにおける前記計測範囲に設定された計測予定点の周囲に所定の閾値で設定された計測予定点範囲に入ったことを判定して、測定を実行する。
【0008】
2.上記1の態様において、前記計測範囲は、メッシュ状に区画され、前記計測予定点は、各メッシュに設定されていることも好ましい。
【0009】
3.上記2の態様において、前記計測範囲の測定状況を示す計測画面を表示する表示部をさらに備え、前記表示部は、前記メッシュごとの測定の進行状況をリアルタイムに識別可能に表示することも好ましい。
【0010】
4.上記2または3の態様において、前記計測画面は、メッシュの測定結果に基づいて、測定済みのメッシュを、高さに応じて異なる色に塗り分けたカラースケールで表示することも好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社トプコン
テラヘルツ波を用いた計測装置及び計測方法
4日前
株式会社トプコン
模型眼
4日前
株式会社トプコン
眼科装置、眼科装置の制御方法、及びプログラム
3日前
個人
通電検査装置
11日前
日本精機株式会社
位置検出装置
7日前
エイブリック株式会社
電流検出回路
4日前
東レ株式会社
シート状物の検査方法
5日前
株式会社ハシマ
検針機
10日前
東ソー株式会社
自動分析装置及び方法
7日前
株式会社チノー
放射光測温装置
4日前
日本特殊陶業株式会社
ガスセンサ
4日前
株式会社 キョーワ
食品搬送装置
4日前
日本特殊陶業株式会社
ガスセンサ
4日前
富士電機株式会社
エンコーダ
5日前
日本碍子株式会社
ガスセンサ
4日前
大成建設株式会社
画像表示システム
今日
株式会社デンソー
試験装置
今日
TDK株式会社
温度センサ
5日前
株式会社ヨコオ
シートコンタクタ
7日前
スタンレー電気株式会社
車両前方視認装置
10日前
ダイハツ工業株式会社
凹部の深さ測定方法
10日前
本田技研工業株式会社
物体検出装置
10日前
本田技研工業株式会社
物体検出装置
10日前
スタンレー電気株式会社
車両前方視認装置
10日前
シチズンファインデバイス株式会社
圧力検出装置
4日前
矢崎総業株式会社
電流センサ
11日前
オムロン株式会社
光電センサ
4日前
シチズンファインデバイス株式会社
圧力検出装置
4日前
TDK株式会社
センサデバイス
4日前
旭光電機株式会社
電気的特性提供装置
4日前
株式会社ミツバ
モータ制御装置
4日前
株式会社イシダ
物品滞留装置
今日
JRCモビリティ株式会社
充電用温度判定回路
7日前
セイコーエプソン株式会社
干渉計
7日前
メディカテック株式会社
分注装置
今日
株式会社JVCケンウッド
撮像装置及び測距方法
10日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ