TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025057779
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167519
出願日
2023-09-28
発明の名称
ロボット、ロボットの制御方法、駆動装置、駆動装置の制御方法、物品の製造方法、プログラム、記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
17/00 20060101AFI20250402BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】関節の近傍において、指などが挟み込まれて損傷するのを抑制できるロボットが期待されていた。
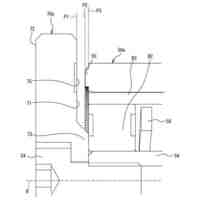
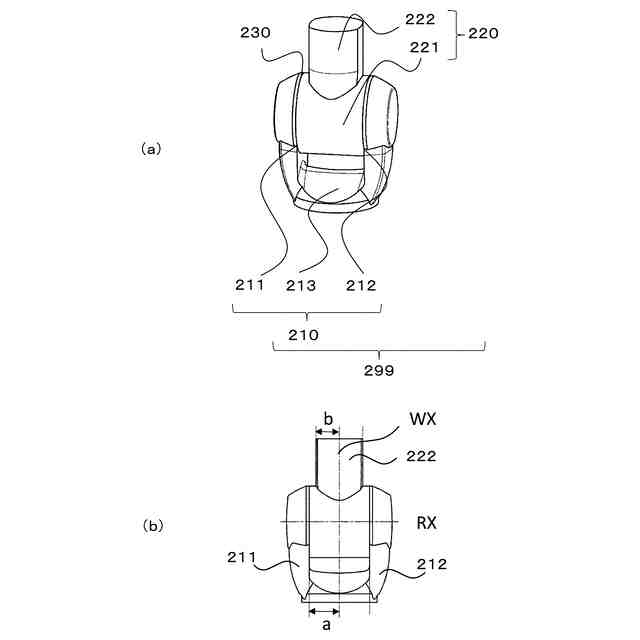
【解決手段】第1リンクと、前記第1リンクが備える第1支持部と第2支持部により支持され、回転軸を中心に腕部が可動な第2リンクと、を備え、前記腕部の可動範囲において、前記第1支持部の内側側面と前記腕部の外側側面は所定の距離で隔てられ、前記第2支持部の内側側面と前記腕部の外側側面は所定の距離で隔てられている、ことを特徴とするロボットである。
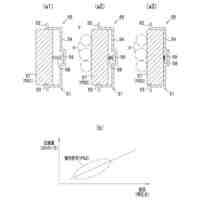
【選択図】図3
特許請求の範囲
【請求項1】
第1リンクと、
前記第1リンクが備える第1支持部と第2支持部により支持され、回転軸を中心に腕部が可動な第2リンクと、を備え、
前記腕部の可動範囲において、前記第1支持部の内側側面と前記腕部の外側側面は所定の距離で隔てられ、前記第2支持部の内側側面と前記腕部の外側側面は所定の距離で隔てられている、
ことを特徴とするロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記腕部の可動範囲において、前記第1支持部の内側側面と前記腕部の外側側面は25mmを超える距離で隔てられ、前記第2支持部の内側側面と前記腕部の外側側面は25mmを超える距離で隔てられている、
ことを特徴とする請求項1に記載のロボット。
【請求項3】
前記第1リンクは、前記第1支持部と前記第2支持部を接続する基部を備え、
前記腕部が可動限界まで回転した時、前記腕部と前記基部は25mmを超える距離を隔てて対向している、
ことを特徴とする請求項1に記載のロボット。
【請求項4】
前記第1リンクは、前記第1支持部と前記第2支持部を接続する基部を備え、
前記回転軸の方向に沿って前記第1支持部から前記基部を経て前記第2支持部に至る前記第1リンクの外面は、滑らかな曲面を備える、
ことを特徴とする請求項1に記載のロボット。
【請求項5】
前記腕部は、滑らかな側面を備え、
前記腕部が可動限界まで回転した時、前記腕部の滑らかな前記側面と、前記基部の滑らかな前記曲面は、25mmを超える距離を隔てて対向している、
ことを特徴とする請求項4に記載のロボット。
【請求項6】
前記第1支持部と前記第2支持部の少なくとも一方には、前記腕部の可動範囲を制限するためのストッパ機構が内蔵されている、
ことを特徴とする請求項1乃至5のいずれか1項に記載のロボット。
【請求項7】
前記ストッパ機構は、
前記第1リンクと前記第2リンクのいずれか一方に設けられた凸部と、前記第1リンクと前記第2リンクのいずれか他方に設けられた凹部またはスリットと、を備え、
前記凸部は、前記凹部または前記スリットと係合している、
ことを特徴とする請求項6に記載のロボット。
【請求項8】
前記凹部または前記スリットは、前記回転軸を中心とする円周の一部に沿って設けられている、
ことを特徴とする請求項7に記載のロボット。
【請求項9】
前記ストッパ機構は、
前記第1リンクと前記第2リンクのいずれか一方に設けられた凸部と、前記第1リンクと前記第2リンクのいずれか他方に設けられた凸部と、を備え、
前記腕部の可動限界の位置で凸部どうしが突き当たるように構成されている、
ことを特徴とする請求項6に記載のロボット。
【請求項10】
前記第1リンクは、前記第1支持部と前記第2支持部を接続する基部と、前記基部を補強する補強部材とを備え、
前記第2リンクは、前記第1支持部と前記第2支持部により支持される円筒部を備え、
前記補強部材は、前記円筒部に向かって突出している、
ことを特徴とする請求項1乃至5のいずれか1項に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、アームなどの可動部を有するロボットに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
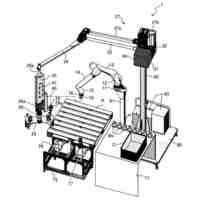
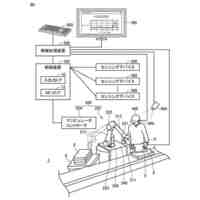
例えばアームなどの可動部を有するロボットに、製造ラインをはじめとする様々な場所で様々な作業を行わせることが期待されており、必然的に、ロボットと人間が接近する機会が増加している。例えば、いわゆるダイレクトティーチングにより動作を教示する際には、作業者がアームなどの可動部を直接保持して動作時と同様にロボットを移動させ、移動軌跡をロボットの制御部に登録する方法が行われ得る。また、ティーチングではない実作業についても、人とロボットが近距離で協働して作業を行う協働作業に対するニーズが増加してきている。
【0003】
このように、ロボットと人間が接近した状態で何らかの作業を行う際には、作業者の安全性の観点から、稼働するロボットに人体が挟み込まれないようにすることが望まれる。
【0004】
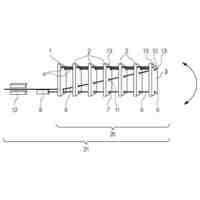
特許文献1には、複数のリンクが連結されたアームが記載されている。各リンクは、長手方向と交差する方向の幅が、関節の回転軸線に向かって連続的に広がる形状を備えており、関節が可動範囲内の最大角度である姿勢になった場合でも、挟み込みが発生しにくい構造を備えている。
【先行技術文献】
【特許文献】
【0005】
特開2020-192624号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
可動側のリンクが固定側のリンクにより両側から支持される両持ち構造の関節機構の場合には、例えば固定側のリンクの側面と可動側のリンクの側面の間に作業者の指などが挟みこまれて損傷する可能性があった。
【0007】
特許文献1に記載されたロボットは、隣り合う関節が最大角度に変位した場合でも、リンクの長手方向の中央付近に空間が確保されることを意図した構成である。しかしながら、両持ち構造の関節の関節近傍において固定側のリンクの側面と可動側のリンクの側面の間で発生し得る指などの挟み込みについては、特許文献1では検討されていなかった。
【0008】
そこで、両持ち構造の関節の関節近傍において、指などが挟み込まれて損傷するのを抑制できるロボットが期待されていた。また、両持ち構造に限らず、トルクセンサなどを内蔵する関節において、指などが挟み込まれて損傷するのを抑制できるロボットが期待されていた。
【課題を解決するための手段】
【0009】
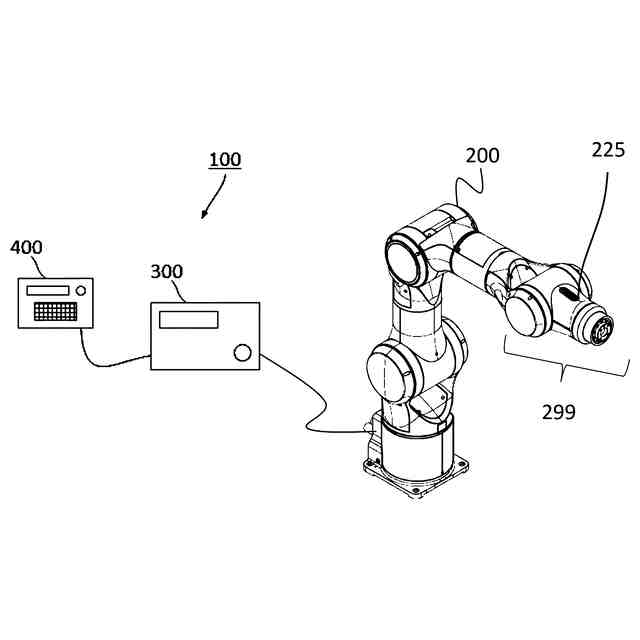
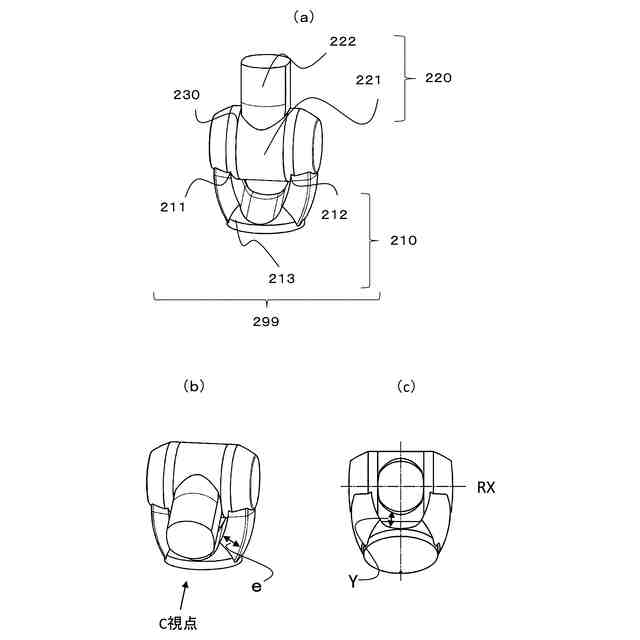
本発明の第1の態様は、第1リンクと、前記第1リンクが備える第1支持部と第2支持部により支持され、回転軸を中心に腕部が可動な第2リンクと、を備え、前記腕部の可動範囲において、前記第1支持部の内側側面と前記腕部の外側側面は所定の距離で隔てられ、前記第2支持部の内側側面と前記腕部の外側側面は所定の距離で隔てられている、ことを特徴とするロボットである。
【0010】
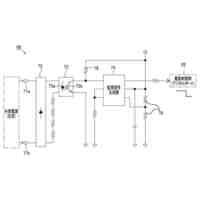
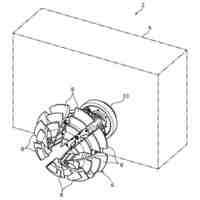
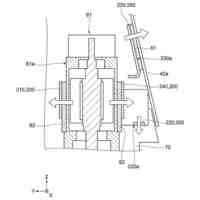
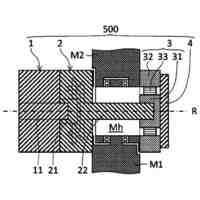
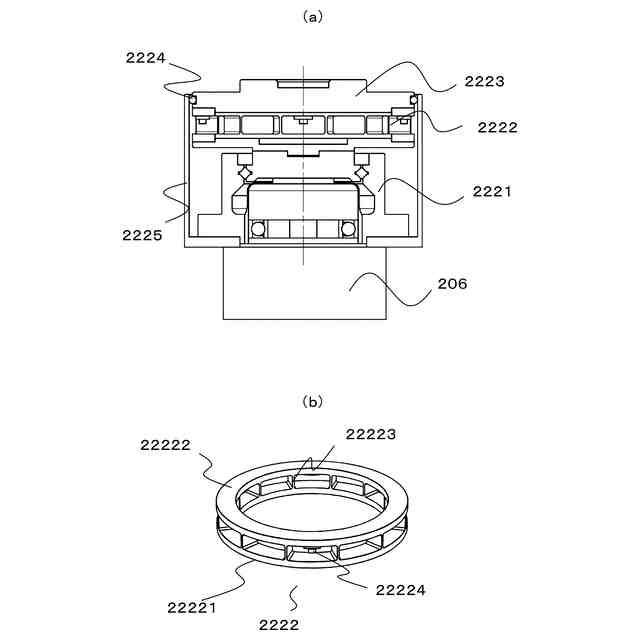
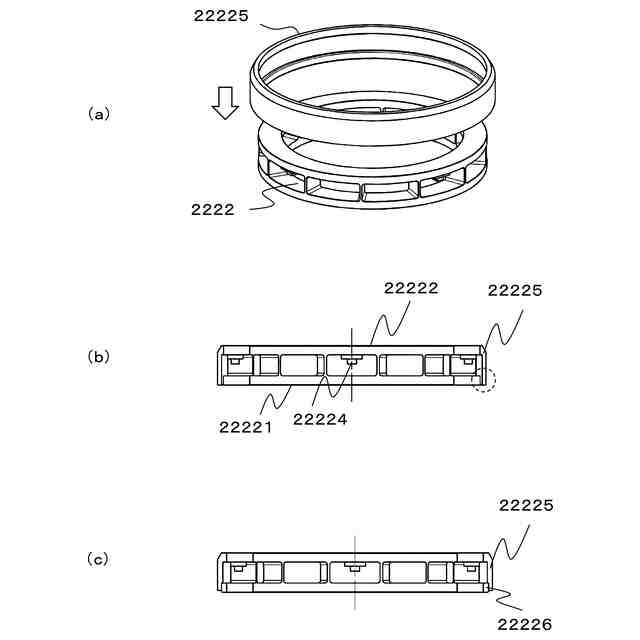
また、本発明の第2の態様は、第1リンクと、前記第1リンクにより支持され、回転軸を中心に回転可能な第2リンクと、前記第2リンクにかかる力を測定するトルクセンサと、を備え、前記トルクセンサは、一次側フランジと、二次側フランジと、前記一次側フランジと前記二次側フランジを連結する弾性体と、前記一次側フランジに対する前記二次側フランジの相対変位を測定するセンサと、前記一次側フランジもしくは二次側フランジのうちのいずれか一方の側面に固定された円筒形状のカバーと、を備える、ことを特徴とするロボットである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
18日前
株式会社クレスコ
補助吸着具
11日前
株式会社不二越
ロボット
3日前
株式会社エビス
腰ベルト用連結具
18日前
川崎重工業株式会社
制動システム
3日前
株式会社イノウ
給油口キャップ用開閉具
4日前
株式会社不二越
垂直多関節ロボット
4日前
アイホン株式会社
ネジ締めカウントシステム
5日前
パナソニック株式会社
工具
4日前
株式会社デンソーウェーブ
ロボット制御システム
24日前
パナソニック株式会社
工具
4日前
アピュアン株式会社
エアー式衝撃工具
21日前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
インパクト工具
19日前
株式会社マキタ
インパクト工具
19日前
中国電力株式会社
電動ドライバー
25日前
SB C&S株式会社
治具セット
18日前
株式会社不二越
ロボットの教示システム及び教示方法
25日前
オムロン株式会社
モバイルロボット
25日前
オムロン株式会社
モバイルロボット
25日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
21日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
25日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
25日前
シナノケンシ株式会社
把持装置
25日前
株式会社星野商店
塗装ロボット用保護カバー
4日前
トーヨーコーケン株式会社
ワーク搬送システム
25日前
学校法人常翔学園
エンドエフェクタ及びロボット
3日前
セイコーエプソン株式会社
ロボット、及びロボットシステム
21日前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
18日前
住友重機械工業株式会社
ロボット制御装置、ロボット制御方法、記憶媒体
13日前
興和株式会社
ロボット用ハンド、ピッキングロボット及びピッキング装置
21日前
キヤノン株式会社
連続体ロボット装置および把持装置
13日前
ヤンマーホールディングス株式会社
駆動装置、作業機械
7日前
オムロン株式会社
協調作業システム、方法およびプログラム
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ