TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025055846
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165242
出願日
2023-09-27
発明の名称
検知方法およびコンピュータ
出願人
リーグソリューションズ株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
15/00 20060101AFI20250401BHJP(測定;試験)
要約
【課題】対象物における所定位置の3次元座標等を画像から位置を検知する新たな検知方法およびコンピュータを提供する。
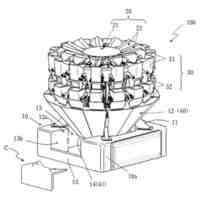
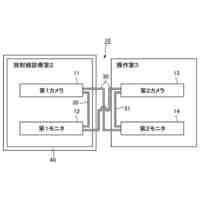
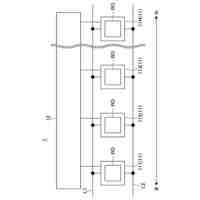
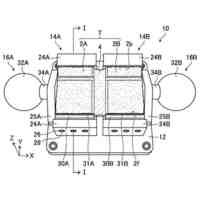
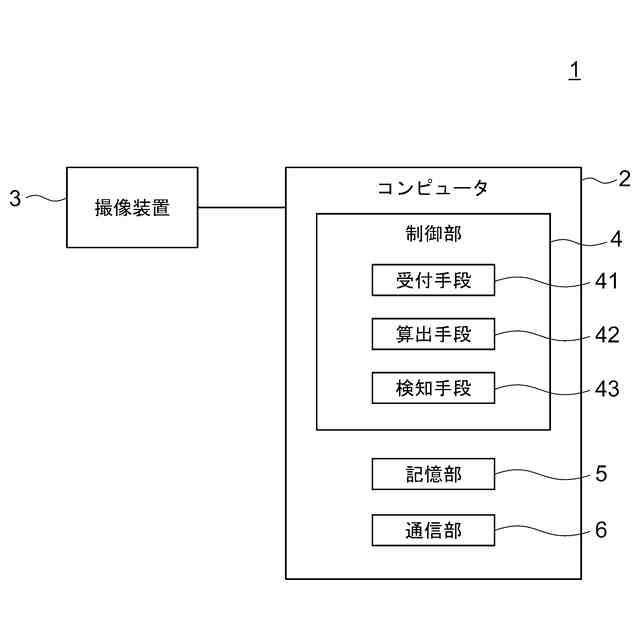
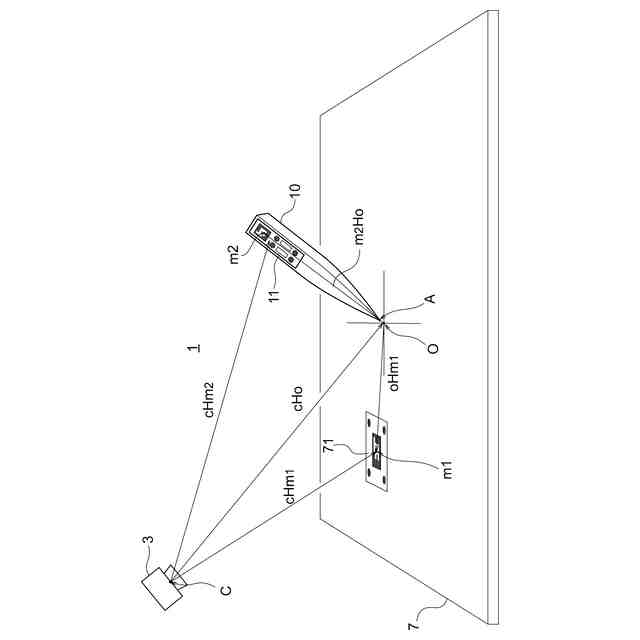
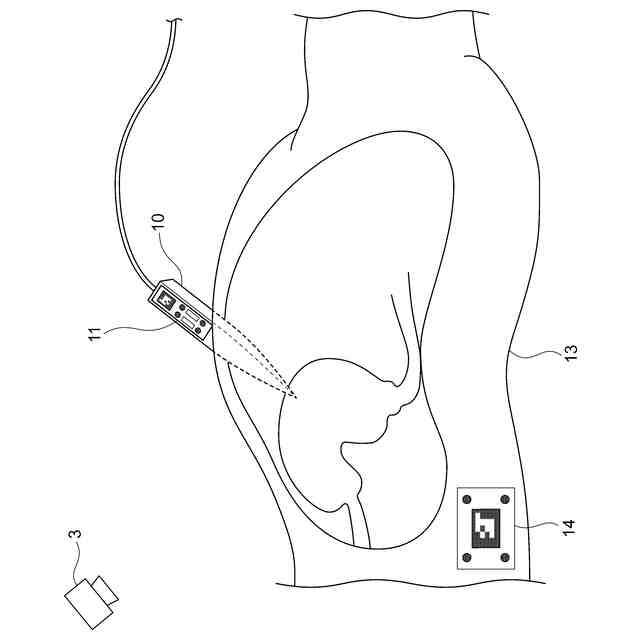
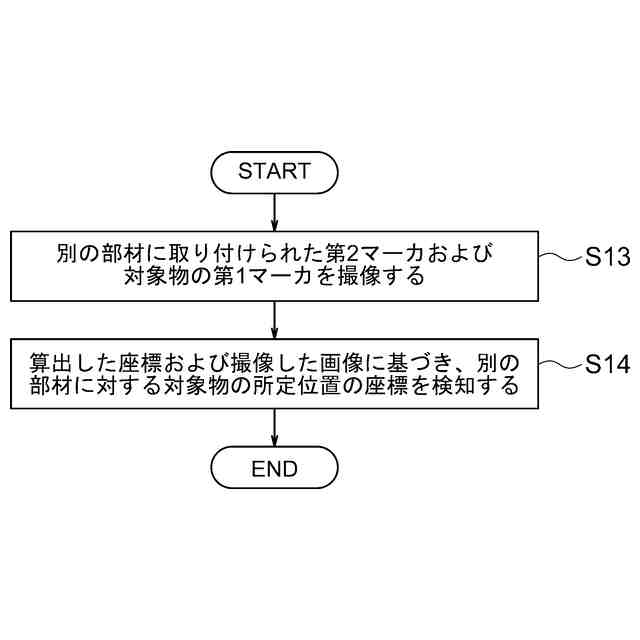
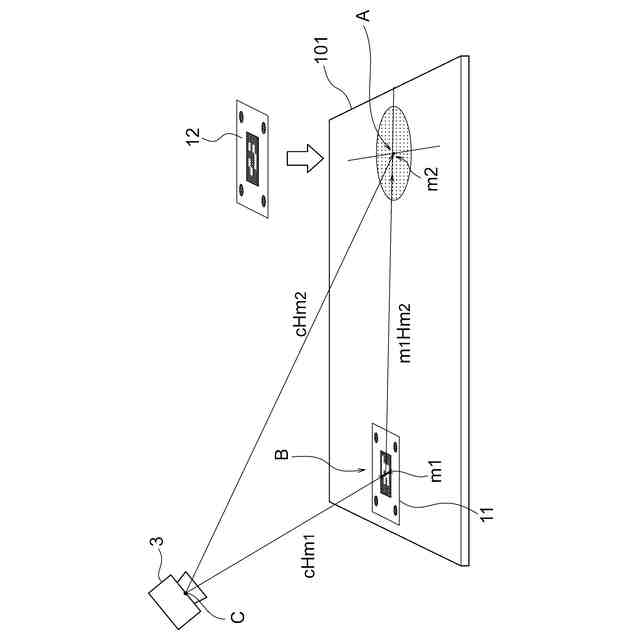
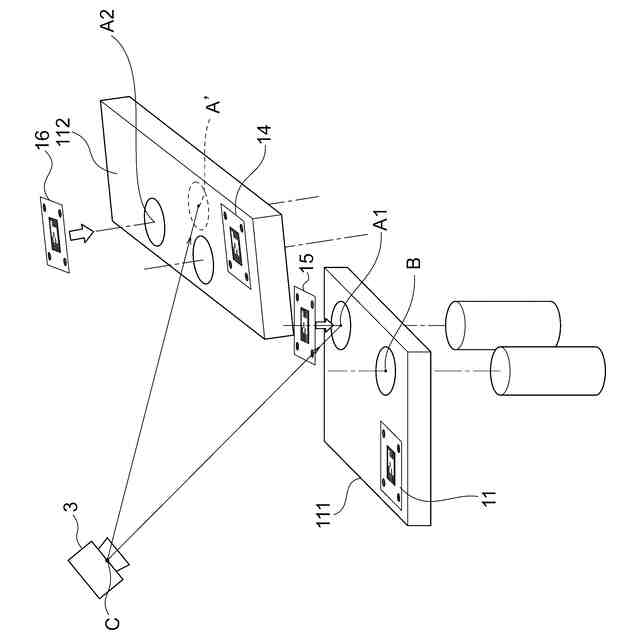
【解決手段】検知方法は、対象物10の所定位置Aを、位置合わせ用マーカ71が配置される位置合わせ部材7の基準点Oに合わせる工程と、位置合わせ用マーカ71および第1マーカ11を撮像する工程と、撮像された画像に基づいて、対象物10に取り付けられている第1マーカ11の位置に対する対象物10の所定位置Aの相対的な3次元座標の情報を取得する工程と、対象物10とは別の部材13に取り付けられている第2マーカ14および対象物10の第1マーカ11を撮像することにより、取得された3次元座標に基づいて、撮像された第1マーカ11および第2マーカ14を含む画像から、別の部材13に対する対象物10の所定位置Aの相対的な3次元座標を検知する工程と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1マーカが取り付けられている対象物の所定位置を検知するための検知方法であって、
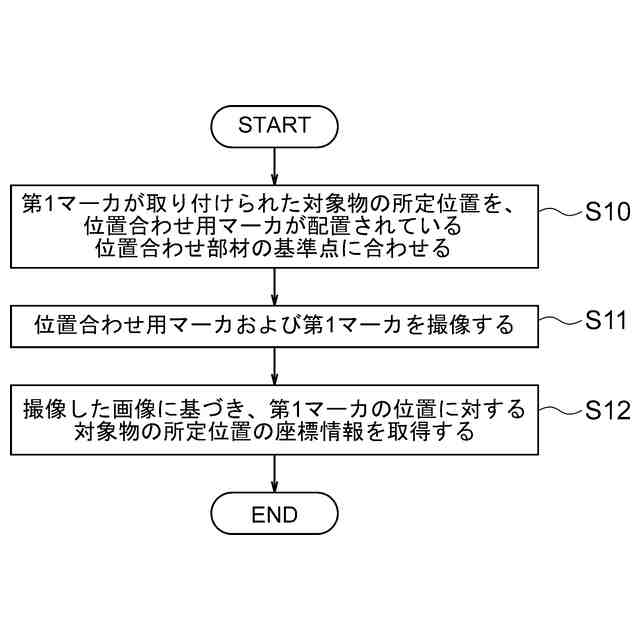
前記対象物の前記所定位置を、位置合わせ用マーカが配置されている位置合わせ部材の所定の基準点に合わせる工程と、
前記位置合わせ部材に配置されている前記位置合わせ用マーカおよび前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標に基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標を検知する工程と、
を備えた、検知方法。
続きを表示(約 3,400 文字)
【請求項2】
第1マーカが取り付けられている対象物の所定位置への方向を検知するための検知方法であって、
前記対象物の前記所定位置を、位置合わせ用マーカが配置されている位置合わせ部材の所定の基準点に合わせる工程と、
前記位置合わせ部材に配置されている前記位置合わせ用マーカおよび前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカに対する前記対象物の前記所定位置の相対的な3次元方向ベクトルの情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元方向ベクトルに基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記第1マーカから前記所定位置への方向の相対的な3次元方向ベクトルを検知する工程と、
を備えた、検知方法。
【請求項3】
第1マーカが取り付けられている対象物の所定位置および所定位置への方向を検知するための検知方法であって、
前記対象物の前記所定位置を、位置合わせ用マーカが配置されている位置合わせ部材の所定の基準点に合わせる工程と、
前記位置合わせ部材に配置されている前記位置合わせ用マーカおよび前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報を取得するとともに前記第1マーカに対する前記対象物の3次元方向ベクトルの情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標および前記3次元方向ベクトルに基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標と、前記別の部材に対する前記第1マーカから前記所定位置への方向の相対的な3次元方向ベクトルとを検知する工程と、
を備えた、検知方法。
【請求項4】
前記位置合わせ部材は平面を有しており、前記平面に所定の基準点が形成されているとともに前記位置合わせ用マーカが配置されている、請求項1乃至3のいずれか一項に記載の検知方法。
【請求項5】
第1マーカが取り付けられている対象物の所定位置を検知するための検知方法であって、
位置合わせ部材の所定の基準点に位置合わせ用マーカを配置し、位置固定の撮像装置により前記位置合わせ用マーカを撮像する工程と、
前記対象物の前記所定位置を、前記位置合わせ部材の所定の前記基準点に合わせ、前記撮像装置により前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカを含む画像および撮像された前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標に基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標を検知する工程と、
を備えた、検知方法。
【請求項6】
第1マーカが取り付けられている対象物の所定位置への方向を検知するための検知方法であって、
位置合わせ部材の所定の基準点に位置合わせ用マーカを配置し、位置固定の撮像装置により前記位置合わせ用マーカを撮像する工程と、
前記対象物の前記所定位置を、前記位置合わせ部材の所定の前記基準点に合わせ、前記撮像装置により前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカを含む画像および撮像された前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカに対する前記対象物の前記所定位置の相対的な3次元方向ベクトルの情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元方向ベクトルに基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記第1マーカから前記所定位置への方向の相対的な3次元方向ベクトルを検知する工程と、
を備えた、検知方法。
【請求項7】
第1マーカが取り付けられている対象物の所定位置および所定位置への方向を検知するための検知方法であって、
位置合わせ部材の所定の基準点に位置合わせ用マーカを配置し、位置固定の撮像装置により前記位置合わせ用マーカを撮像する工程と、
前記対象物の前記所定位置を、前記位置合わせ部材の所定の前記基準点に合わせ、前記撮像装置により前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカを含む画像および撮像された前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報および前記第1マーカに対する前記対象物の前記所定位置の相対的な3次元方向ベクトルの情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標および前記3次元方向ベクトルに基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標と、前記別の部材に対する前記第1マーカから前記所定位置への方向の相対的な3次元方向ベクトルとを検知する工程と、
を備えた、検知方法。
【請求項8】
前記位置合わせ部材の前記基準点には凹部が形成されており、前記対象物の前記所定位置の部分を前記凹部に入れることにより前記対象物の前記所定位置を前記基準点に合わせる、請求項1乃至3および5乃至7のうちいずれか一項に記載の検知方法。
【請求項9】
第1マーカが取り付けられている対象物の所定位置に位置合わせ用マーカを配置し、前記第1マーカおよび前記位置合わせ用マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標に基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標を検知する工程と、
を備えた、検知方法。
【請求項10】
第1マーカが取り付けられている対象物の所定位置に位置合わせ用マーカを配置し、前記第1マーカおよび前記位置合わせ用マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記所定位置から前記第1マーカに直交するよう延びる所定方向の3次元方向ベクトルの情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元方向ベクトルに基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記所定方向の相対的な3次元方向ベクトルを検知する工程と、
を備えた、検知方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、検知方法およびコンピュータに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来から、対象物にマーカを取り付けてこのマーカをカメラにより撮像することによってマーカの画像から対象物の位置や姿勢を計測する技術が知られている。対象物に取り付けられるマーカとして例えば特許文献1等に開示されるものがある。一般的なマーカは、対象物に取り付けることのできる平面パターンである。マーカのうち代表的なものは、正方形の黒い枠とその内部に印刷された2次元パターンコードを含む。そして、マーカをカメラで撮像してマーカの画像を取得することにより、マーカとカメラの相対的な位置と姿勢を認識し、マーカの付けられた対象物の位置や姿勢を認識することができる。また、カメラにより、マーカに記録された情報を読み取ることもできる。
【先行技術文献】
【特許文献】
【0003】
特開2012-145559号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
マーカが取り付けられている対象物におけるカメラにより撮像することが困難な所定位置の3次元座標やこの所定位置に関連する所定方向の3次元方向ベクトルをマーカの画像から検知する技術が望まれているが、このような技術は従来知られていなかった。
【0005】
本開示は、このような点を考慮してなされたものであり、マーカが取り付けられている対象物における所定位置の3次元座標やこの所定位置に関連する所定方向の3次元方向ベクトルをマーカの画像から検知する新たな検知方法およびコンピュータを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の検知方法は、
第1マーカが取り付けられている対象物の所定位置を検知するための検知方法であって、
前記対象物の前記所定位置を、位置合わせ用マーカが配置されている位置合わせ部材の所定の基準点に合わせる工程と、
前記位置合わせ部材に配置されている前記位置合わせ用マーカおよび前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標に基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標を検知する工程と、を備える。
【0007】
本開示の検知方法は、
第1マーカが取り付けられている対象物の所定位置への方向を検知するための検知方法であって、
前記対象物の前記所定位置を、位置合わせ用マーカが配置されている位置合わせ部材の所定の基準点に合わせる工程と、
前記位置合わせ部材に配置されている前記位置合わせ用マーカおよび前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカに対する前記対象物の前記所定位置の相対的な3次元方向ベクトルの情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元方向ベクトルに基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記第1マーカから前記所定位置への方向の相対的な3次元方向ベクトルを検知する工程と、
を備える。
【0008】
本開示の検知方法は、
第1マーカが取り付けられている対象物の所定位置および所定位置への方向を検知するための検知方法であって、
前記対象物の前記所定位置を、位置合わせ用マーカが配置されている位置合わせ部材の所定の基準点に合わせる工程と、
前記位置合わせ部材に配置されている前記位置合わせ用マーカおよび前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカおよび前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報を取得するとともに前記第1マーカに対する前記対象物の3次元方向ベクトルの情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標および前記3次元方向ベクトルに基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標と、前記別の部材に対する前記第1マーカから前記所定位置への方向の相対的な3次元方向ベクトルとを検知する工程と、
を備える。
【0009】
本開示の検知方法においては、
前記位置合わせ部材は平面を有しており、前記平面に所定の基準点が形成されているとともに前記位置合わせ用マーカが配置されていてもよい。
【0010】
本開示の検知方法は、
第1マーカが取り付けられている対象物の所定位置を検知するための検知方法であって、
位置合わせ部材の所定の基準点に位置合わせ用マーカを配置し、位置固定の撮像装置により前記位置合わせ用マーカを撮像する工程と、
前記対象物の前記所定位置を、前記位置合わせ部材の所定の前記基準点に合わせ、前記撮像装置により前記第1マーカを撮像する工程と、
撮像された前記位置合わせ用マーカを含む画像および撮像された前記第1マーカを含む画像に基づいて、前記対象物に取り付けられている前記第1マーカの位置に対する前記対象物の前記所定位置の相対的な3次元座標の情報を取得する工程と、
前記対象物とは別の部材に取り付けられている第2マーカおよび前記対象物の前記第1マーカを撮像することにより、取得された前記3次元座標に基づいて、撮像された前記第1マーカおよび前記第2マーカを含む画像から、前記別の部材に対する前記対象物の前記所定位置の相対的な3次元座標を検知する工程と、
を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
12日前
株式会社イシダ
計量装置
6日前
個人
アクセサリー型テスター
13日前
エイブリック株式会社
電流検出回路
26日前
栄進化学株式会社
浸透探傷用濃縮液
19日前
東レ株式会社
シート状物の検査方法
27日前
株式会社テイエルブイ
振動検出装置
12日前
株式会社ミツトヨ
画像測定機
14日前
トヨタ自動車株式会社
検査装置
6日前
株式会社チノー
放射光測温装置
26日前
ダイハツ工業株式会社
試料セル
12日前
日本特殊陶業株式会社
ガスセンサ
26日前
日本特殊陶業株式会社
ガスセンサ
26日前
トヨタ自動車株式会社
電気自動車
13日前
大和製衡株式会社
計量装置
19日前
株式会社 キョーワ
食品搬送装置
26日前
理研計器株式会社
ガス検出器
14日前
富士電機株式会社
エンコーダ
27日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
日本碍子株式会社
ガスセンサ
26日前
理研計器株式会社
ガス検出器
14日前
株式会社熊谷組
計測システム
19日前
大成建設株式会社
画像表示システム
22日前
東ソー株式会社
簡易型液体クロマトグラフ
8日前
リバークル株式会社
荷重移動試験装置
6日前
株式会社 システムスクエア
検査装置
20日前
株式会社ニコン
検出装置
12日前
大和製衡株式会社
表示システム
4日前
東洋計器株式会社
超音波式流量計
19日前
株式会社デンソー
試験装置
22日前
TDK株式会社
温度センサ
27日前
東洋計器株式会社
超音波式流量計
19日前
東洋計器株式会社
超音波式流量計
19日前
大和ハウス工業株式会社
引張装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ