TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025054048
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023163225
出願日
2023-09-26
発明の名称
計測システムおよび計測方法
出願人
西松建設株式会社
,
ジオマシンエンジニアリング株式会社
代理人
弁理士法人MIP
主分類
G01C
15/00 20060101AFI20250331BHJP(測定;試験)
要約
【課題】 作業中に粉塵が発生しても、建設機械の位置および姿勢を計測できるシステムおよび方法を提供すること。
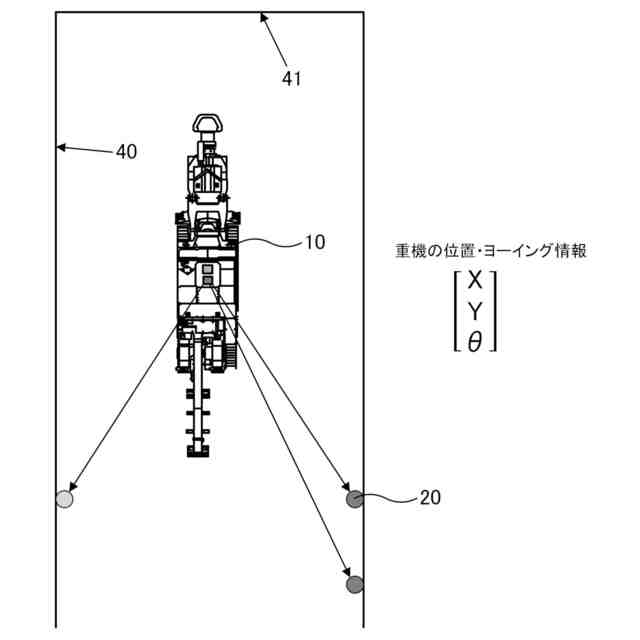
【解決手段】 計測システムは、予め計測された位置座標を有する3以上の基準球20と、重機10に搭載され、重機10により粉塵が発生する作業の開始前に、3以上の基準球20を三次元計測する3Dスキャナ21と、重機10に搭載され、作業の開始前および作業中の重機10の進行方向を二次元計測するラインスキャナ22と、三次元計測された第1の計測結果と、作業の開始前および作業中に二次元計測された複数の第2の計測結果とに基づき、作業中の重機10の現在の位置および姿勢を算出するPC23とを含む。
【選択図】 図1
特許請求の範囲
【請求項1】
建設機械の位置および姿勢を計測するシステムであって、
予め計測された位置座標を有する3以上の球状ターゲットと、
前記建設機械に搭載され、前記建設機械により粉塵が発生する作業の開始前に、前記3以上の球状ターゲットを三次元計測する三次元計測手段と、
前記建設機械に搭載され、前記作業の開始前および前記作業中の前記建設機械の進行方向を二次元計測する二次元計測手段と、
前記三次元計測手段により三次元計測された第1の計測結果と、前記作業の開始前および前記作業中に前記二次元計測手段により二次元計測された複数の第2の計測結果とに基づき、前記作業中の前記建設機械の現在の位置および姿勢を算出する演算手段と
を含む、計測システム。
続きを表示(約 1,300 文字)
【請求項2】
前記二次元計測手段は、前記建設機械の側方のトンネル壁面および前方の切羽を二次元計測し、
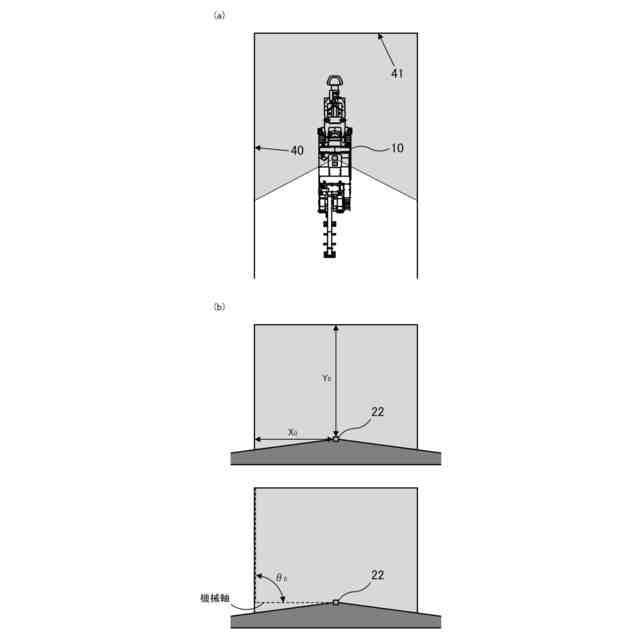
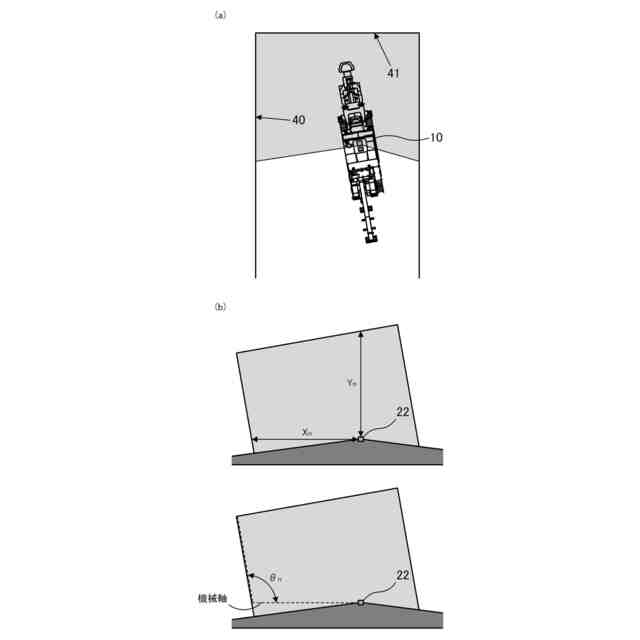
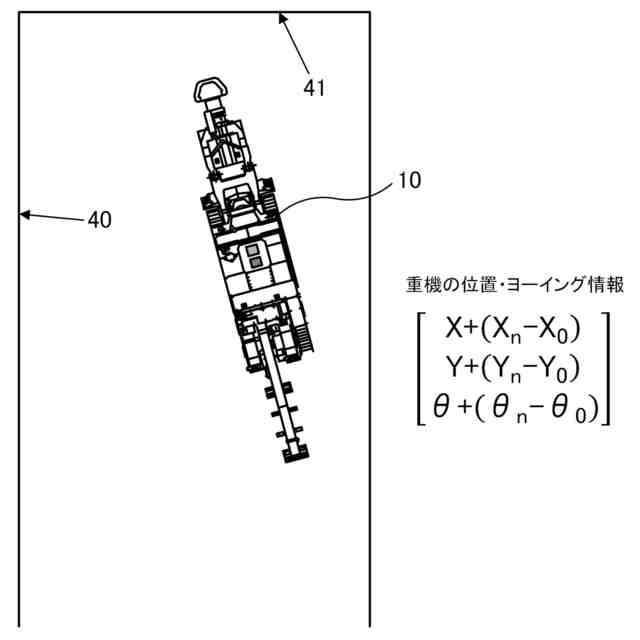
前記演算手段は、前記第1の計測結果から前記作業の開始前における前記建設機械の位置および偏揺を算出し、前記複数の第2の計測結果から、前記作業の開始前から前記作業中の現在までの前記トンネル壁面および前記切羽との距離、前記トンネル壁面と前記建設機械の機械軸との角度の変化量を算出し、前記作業の開始前における前記建設機械の位置および偏揺と前記距離および前記角度の変化量とに基づき、前記建設機械の現在の位置および姿勢を算出する、請求項1に記載の計測システム。
【請求項3】
前記作業中において、前記建設機械の進行方向へ向けて空気が供給され、
前記二次元計測手段は、前記空気により前記粉塵の濃度が低下した後の前記建設機械の進行方向を二次元計測する、請求項1または2に記載の計測システム。
【請求項4】
前記3以上の球状ターゲットは、前記建設機械よりトンネル坑口側に配置される、請求項1または2に記載の計測システム。
【請求項5】
建設機械の位置および姿勢を計測する方法であって、
前記建設機械に搭載された三次元計測手段により、前記建設機械により粉塵が発生する作業の開始前に、予め計測された位置座標を有する3以上の球状ターゲットを三次元計測するステップと、
前記建設機械に搭載された二次元計測手段により、前記作業の開始前の前記建設機械の進行方向を二次元計測するステップと、
前記二次元計測手段により、前記作業中の前記建設機械の進行方向を二次元計測するステップと、
前記三次元計測手段により三次元計測された第1の計測結果と、前記作業の開始前および前記作業中に前記二次元計測手段により二次元計測された複数の第2の計測結果とに基づき、前記作業中の前記建設機械の現在の位置および姿勢を算出するステップと
を含む、計測方法。
【請求項6】
前記作業の開始前および前記作業中の前記建設機械の進行方向を二次元計測するステップでは、前記建設機械の側方のトンネル壁面および前方の切羽を二次元計測し、
前記算出するステップでは、前記第1の計測結果から前記作業の開始前における前記建設機械の位置および偏揺を算出し、前記複数の第2の計測結果から、前記作業の開始前から前記作業中の現在までの前記トンネル壁面および前記切羽との距離、前記トンネル壁面と前記建設機械の機械軸との角度の変化量を算出し、前記作業の開始前における前記建設機械の位置および偏揺と前記距離および前記角度の変化量とに基づき、前記建設機械の現在の位置および姿勢を算出する、請求項5に記載の計測方法。
【請求項7】
前記作業中において、前記建設機械の進行方向へ向けて空気が供給され、
前記作業中の前記建設機械の進行方向を二次元計測するステップでは、前記空気により前記粉塵の濃度が低下した後の前記建設機械の進行方向を二次元計測する、請求項5または6に記載の計測方法。
【請求項8】
前記3以上の球状ターゲットは、前記建設機械よりトンネル坑口側に配置される、請求項5または6に記載の計測方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設機械の位置および姿勢を計測するシステムおよび方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、山岳トンネルを施工する重機等の建設機械は、安心、安全な作業、快適な労働環境を実現するため、遠隔操作が行われるようになってきている。遠隔操作において安全性や施工性を向上させるためには、建設機械の位置や偏揺(ヨーイング)を計測し、建設機械の位置や姿勢を常時把握する必要がある。
【0003】
そこで、トンネル坑内に設置した位置座標が既知の3つのターゲットを、建設機械に搭載した3Dスキャナで視準し、建設機械の位置やヨーイングを算出するシステムや方法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2019-158637号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の従来の技術では、作業開始前は比較的粉塵が少ないため計測が可能であるが、作業中には粉塵が発生するため、ターゲットを視準することができず、粉塵濃度が下がるまで作業を止める必要があるという問題があった。
【課題を解決するための手段】
【0006】
本発明は、上記課題に鑑みてなされたものであり、建設機械の位置および姿勢を計測するシステムであって、
予め計測された位置座標を有する3以上の球状ターゲットと、
建設機械に搭載され、建設機械により粉塵が発生する作業の開始前に、3以上の球状ターゲットを三次元計測する三次元計測手段と、
建設機械に搭載され、作業の開始前および作業中の建設機械の進行方向を二次元計測する二次元計測手段と、
三次元計測手段により三次元計測された第1の計測結果と、作業の開始前および作業中に二次元計測手段により二次元計測された複数の第2の計測結果とに基づき、作業中の建設機械の現在の位置および姿勢を算出する演算手段と
を含む、計測システムが提供される。
【発明の効果】
【0007】
本発明によれば、作業中に粉塵が発生しても、建設機械の位置および姿勢を計測することが可能となる。
【図面の簡単な説明】
【0008】
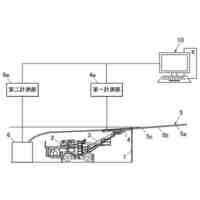
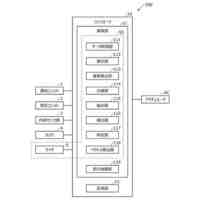
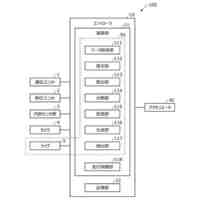
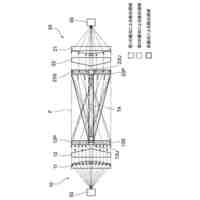
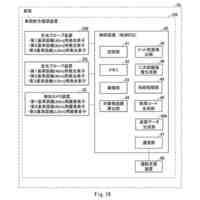
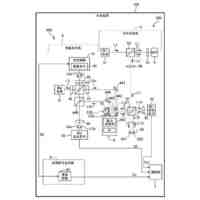
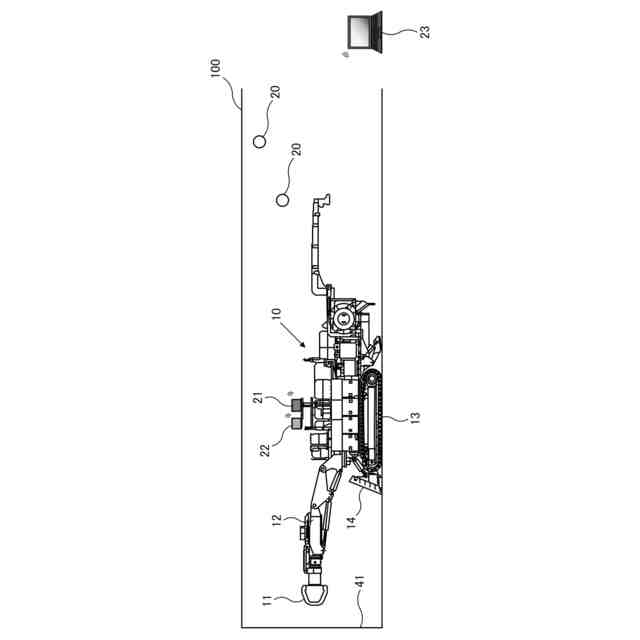
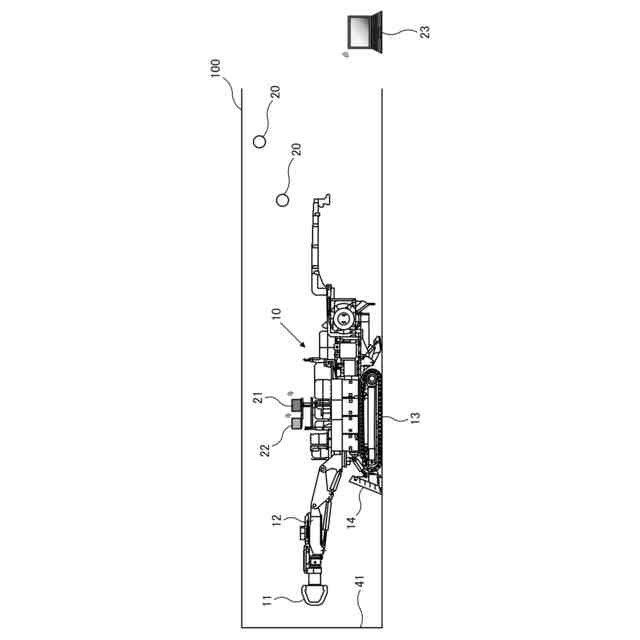
計測システムの構成例を示した図。
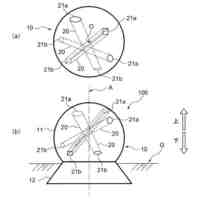
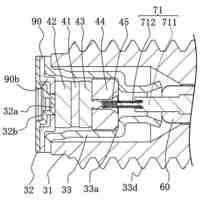
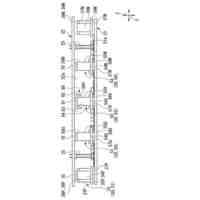
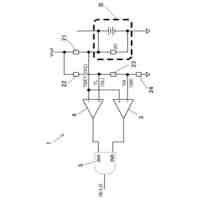
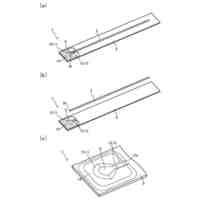
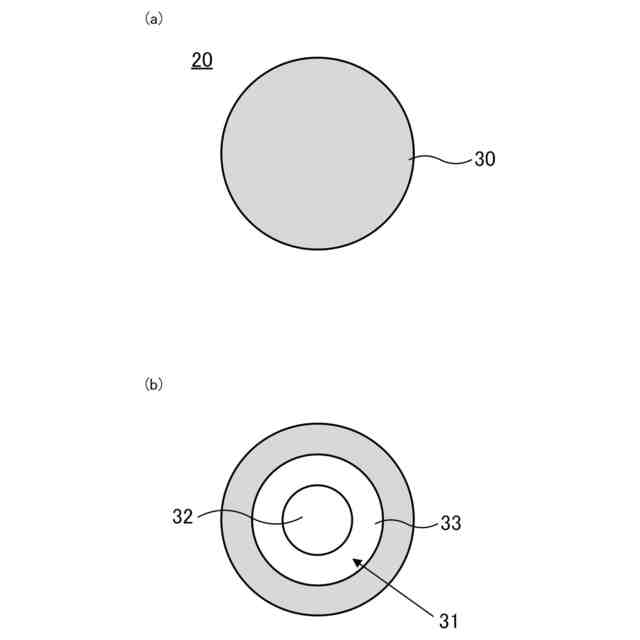
基準球の構成例を示した図。
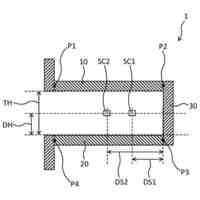
作業開始前に基準球を三次元計測し、建設機械の位置および姿勢を算出する方法について説明する図。
作業開始前にトンネル壁面および切羽との相対位置関係を計測する様子を例示した図。
作業中にトンネル壁面および切羽との相対位置関係を計測する様子を例示した図。
建設機械の現在の位置および姿勢を算出する方法について説明する図。
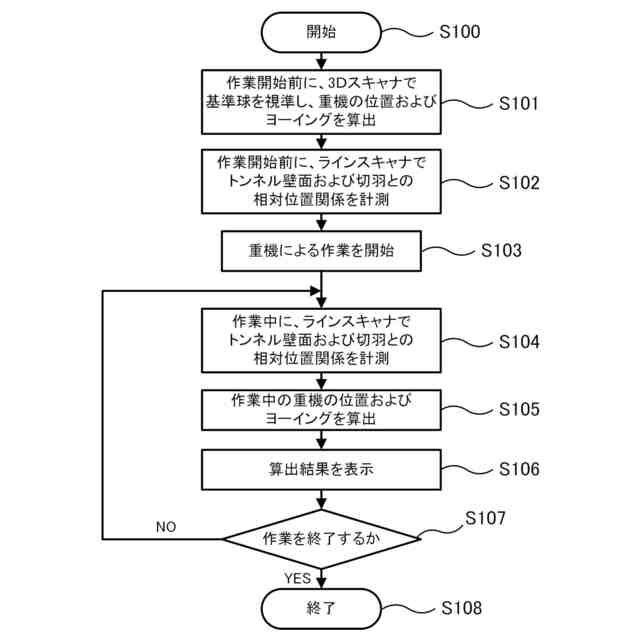
作業中の建設機械の位置および姿勢を計測する処理の一例を示したフローチャート。
【発明を実施するための形態】
【0009】
図1は、本実施形態に係る計測システムの構成例を示した図である。計測システムは、建設機械に搭載され、建設機械の位置および姿勢を計測するシステムである。建設機械は、土木・建築の作業に使用される機械(重機)であり、例えばドリルジャンボ、自由断面掘削機(ロードヘッダー)、コンクリート吹付機、ブレーカー、ホイールローダ、支保工建込機、シールドマシン等である。ここに例示した重機は、山岳トンネルを施工する重機として使用されるものである。なお、本実施形態に係る計測システムは、山岳トンネルを施工する重機以外の重機に搭載されてもよいが、以下、山岳トンネルを施工する重機に搭載されるものとして説明する。
【0010】
山岳トンネルを施工する重機10は、安心、安全な作業、快適な労働環境を実現するため、遠隔操作が行われるようになってきている。図1に示す例では、重機10は、ロードヘッダーとされている。ロードヘッダーは、先端に前方の岩盤等を掘削するための回転式のビット11と、ビット11を上下左右に移動可能なブーム12と、自走可能にする無限軌道(キャタピラー)13と、前面に掘削した土砂をかき分けるためのブレード14とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
西松建設株式会社
海底工作物
16日前
西松建設株式会社
計測システムおよび計測方法
6日前
ジオマシンエンジニアリング株式会社
地山評価装置及びプログラム
5日前
日本鋳造株式会社
鋼材ダンパー
2日前
個人
通電検査装置
10日前
日本精機株式会社
位置検出装置
6日前
株式会社ハシマ
検針機
9日前
エイブリック株式会社
電流検出回路
3日前
東レ株式会社
シート状物の検査方法
4日前
東ソー株式会社
自動分析装置及び方法
6日前
株式会社チノー
放射光測温装置
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
株式会社 キョーワ
食品搬送装置
3日前
日本碍子株式会社
ガスセンサ
3日前
富士電機株式会社
エンコーダ
4日前
TDK株式会社
温度センサ
4日前
株式会社ヨコオ
シートコンタクタ
6日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
本田技研工業株式会社
物体検出装置
9日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
矢崎総業株式会社
電流センサ
10日前
本田技研工業株式会社
物体検出装置
9日前
ダイハツ工業株式会社
凹部の深さ測定方法
9日前
オムロン株式会社
光電センサ
3日前
スタンレー電気株式会社
車両前方視認装置
9日前
スタンレー電気株式会社
車両前方視認装置
9日前
TDK株式会社
センサデバイス
3日前
旭光電機株式会社
電気的特性提供装置
3日前
株式会社ミツバ
モータ制御装置
3日前
セイコーエプソン株式会社
干渉計
6日前
JRCモビリティ株式会社
充電用温度判定回路
6日前
TDK株式会社
センサ
4日前
株式会社JVCケンウッド
撮像装置及び測距方法
9日前
日本信号株式会社
表示装置
4日前
内山工業株式会社
分析装置用部材
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ