TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044298
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2024166057,2023150814
出願日
2024-09-25,2023-09-19
発明の名称
検知装置、検知方法及び検知プログラム
出願人
三菱電機インフォメーションシステムズ株式会社
代理人
弁理士法人クロスボーダー特許事務所
主分類
G01S
17/66 20060101AFI20250325BHJP(測定;試験)
要約
【課題】点群データを用いて、適切に対象物を検知可能にする。
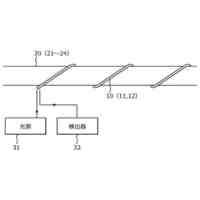
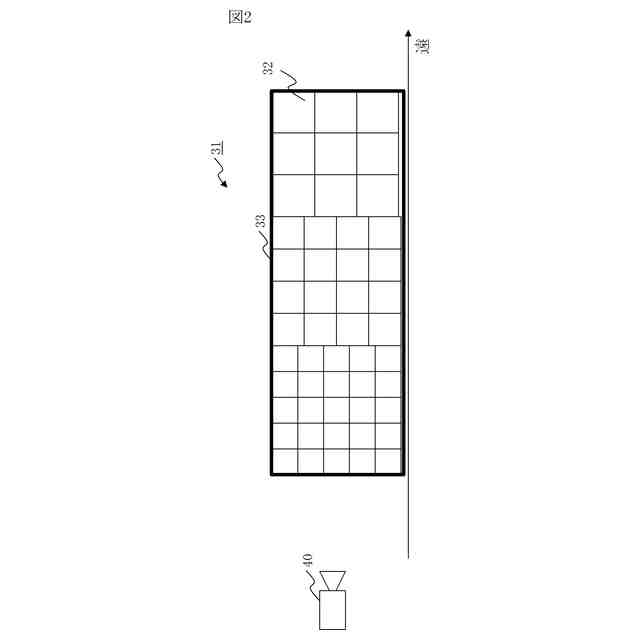
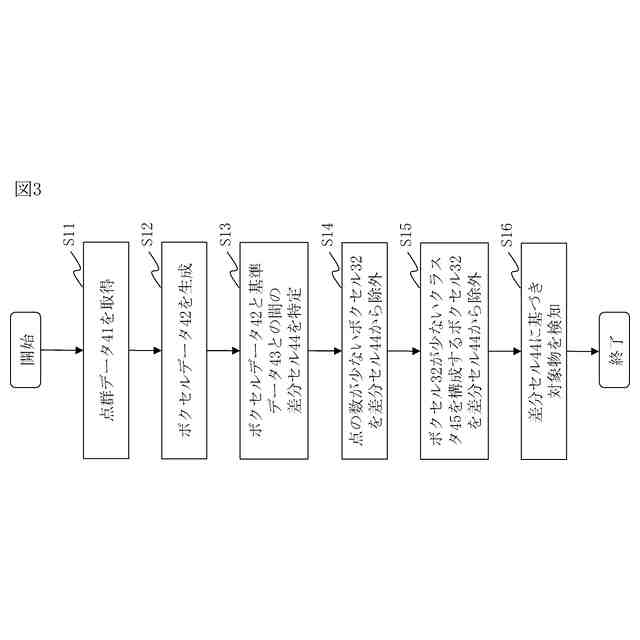
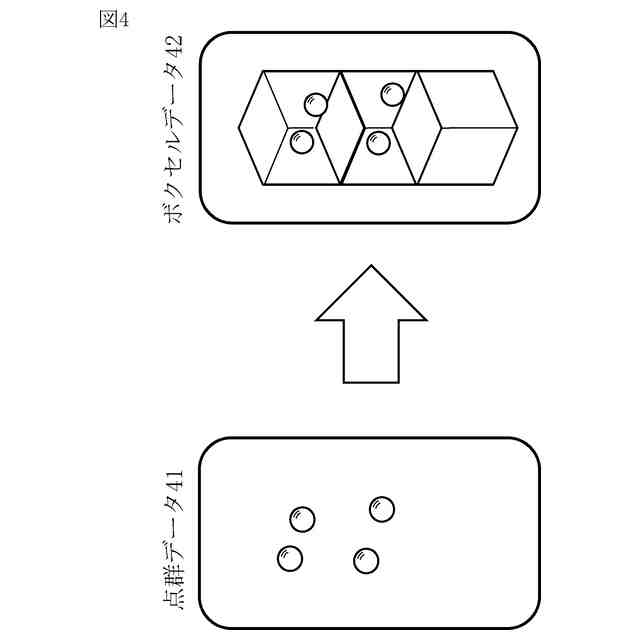
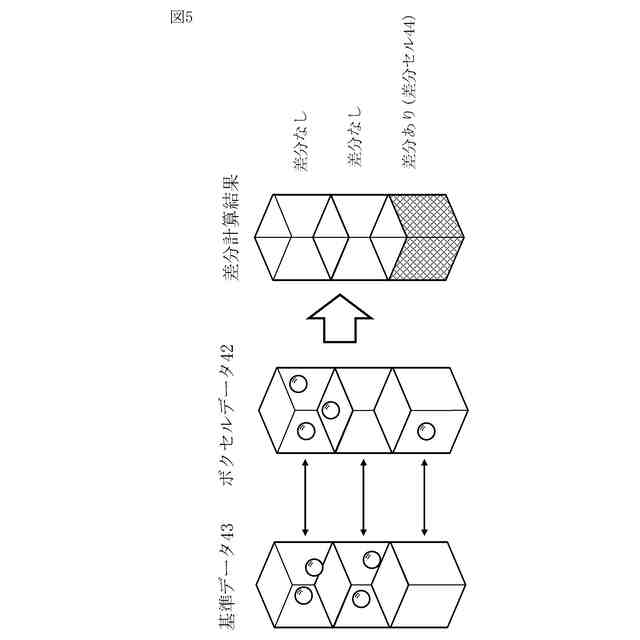
【解決手段】点群取得部21は、対象領域に対して照射光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得する。ボクセル化部22は、点群データの各点を対象の点として、対象領域を分割した複数のボクセルのうち対象の点の位置が含まれるボクセルに対象の点を対応付けることにより、点群データに対応するボクセルデータを生成する。差分特定部23は、複数のボクセルそれぞれについて、対応付けされた点の有無に基づき、ボクセルデータと基準データとの間で差分がある差分セルを特定する。この際、差分特定部23は、基準データで点が対応付けされたボクセルを差分セルとして特定せず、基準データでは点が対応付けされておらず、かつ、ボクセルデータでは点が対応付けされているボクセルを差分セルとして特定する。
【選択図】図1
特許請求の範囲
【請求項1】
対象領域に対して照射光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得する点群取得部と、
前記点群取得部によって取得された前記点群データの各点を対象の点として、前記対象領域を分割した複数のボクセルのうち対象の点の位置が含まれるボクセルに対象の点を対応付けることにより、前記点群データに対応するボクセルデータを生成するボクセル化部と、
前記複数のボクセルそれぞれについて、対応付けされた点の有無に基づき、前記ボクセル化部によって生成された前記ボクセルデータと基準データとの間で差分がある差分セルを特定する差分特定部であって、前記基準データで点が対応付けされたボクセルを前記差分セルとして特定せず、前記基準データでは点が対応付けされておらず、かつ、前記ボクセルデータでは点が対応付けされているボクセルを前記差分セルとして特定する差分特定部と
を備える検知装置。
続きを表示(約 1,000 文字)
【請求項2】
前記検知装置は、さらに、
前記差分特定部によって特定された前記差分セルに基づき対象物を検知する検知部
を備える請求項1に記載の検知装置。
【請求項3】
前記差分特定部は、特定された差分セルを特定種別の物体検知装置に受け渡す
請求項1に記載の検知装置。
【請求項4】
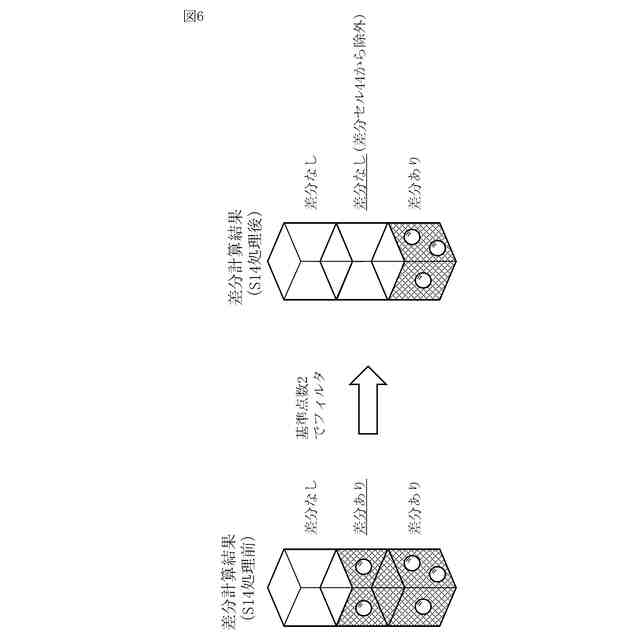
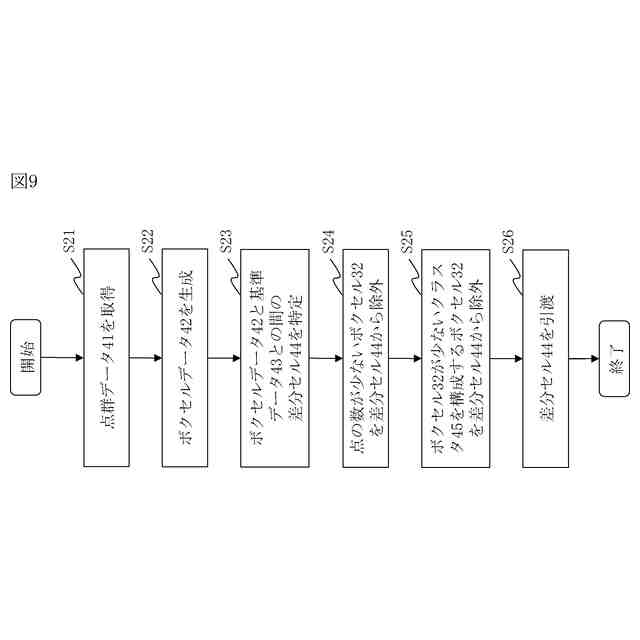
前記差分特定部は、前記差分セルのうち、前記ボクセルデータにおいて対応付けされた点の数が基準点数以下のボクセルを前記差分セルから除外する
請求項1に記載の検知装置。
【請求項5】
前記基準点数は、前記対象領域において前記点群データを取得する光センサからの距離に応じた値が設定される
請求項4に記載の検知装置。
【請求項6】
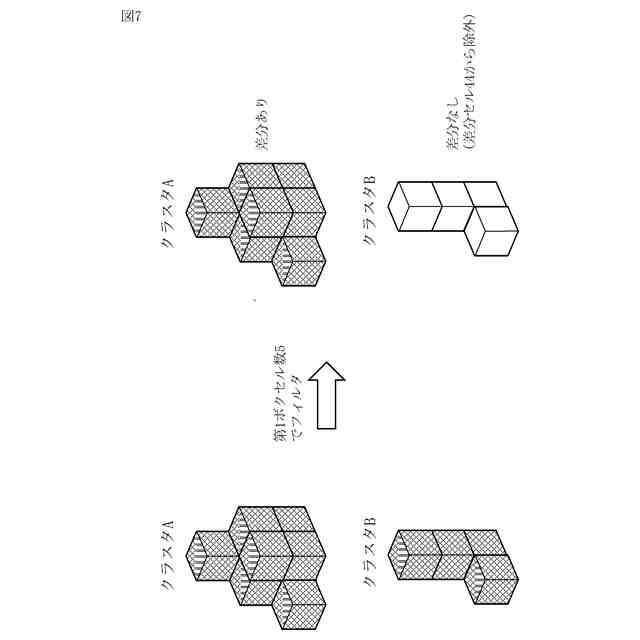
前記差分特定部は、前記差分セルをクラスタリングして得られたクラスタに含まれるボクセルの数が第1ボクセル数以下のクラスタを構成するボクセルを前記差分セルから除外する
請求項1に記載の検知装置。
【請求項7】
前記第1ボクセル数は、前記対象領域において前記点群データを取得する光センサからの距離に応じた値が設定される
請求項6に記載の検知装置。
【請求項8】
前記点群取得部は、点群データを繰り返し取得し、
前記検知装置は、さらに、
検出期間に取得された前記点群データに基づき前記差分セルとして特定されたボクセルのうち、前記差分セルとして特定された割合が基準割合以上のボクセルを対象セルとして特定する蓄積処理部
を備え、
前記検知部は、前記蓄積処理部によって特定された前記対象セルに基づき対象物を検知する
請求項2に記載の検知装置。
【請求項9】
前記検知部は、前記対象セルをクラスタリングして得られたクラスタのうち、クラスタに含まれるボクセルの数が第2ボクセル数より多いクラスタを前記対象物として検知する請求項8に記載の検知装置。
【請求項10】
前記基準割合と前記第2ボクセル数との少なくともいずれかは、前記対象領域において前記点群データを取得する光センサからの距離に応じた値が設定される
請求項9に記載の検知装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、点群データを用いて対象物を検知する技術に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
可視光カメラを用いて置去物等の物体を検知する技術がある。可視光カメラを用いて物体を検知する場合には、夜間のように光量が不足する環境と、可視光カメラに直射日光が差し込みフレアが発生する環境とでは、物体を適切に検知できない。
【0003】
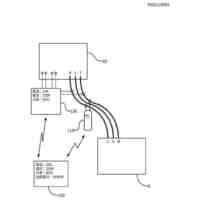
照射光を照射して反射点で反射した反射光を受信することにより点群データを収集するLiDARといった光センサがある。LiDARは、Light Detection And Rangingの略である。光センサでは、夜間のように光量が不足する環境と、可視光カメラに直射日光が差し込みフレアが発生する環境とにおいても、点群データを得ることが可能である。そこで、光センサを用いて得られた点群データに基づき対象物を検知することが検討されている。
【0004】
特許文献1には、メモリに保持された背景点群データと、現時点の点群データとを比較して、差が生じた場合に何かしらの物体が現れたと識別することが記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2020-118619号公報
特開2015-014514号公報
特開2020-076580号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
光センサでは、照射光を常に同じ箇所に照射することは難しく、若干のずれが生じる。その結果、生成される点群データも毎回少しずつ異なる。そのため、特許文献1に記載されたように、背景点群データと現時点の点群データとを比較すると、実際には物体が現れていない部分についても物体が現れたと識別されてしまう可能性がある。
本開示は、点群データを用いて、適切に対象物を検知可能にすることを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る検知装置は、
対象領域に対して照射光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得する点群取得部と、
前記点群取得部によって取得された前記点群データの各点を対象の点として、前記対象領域を分割した複数のボクセルのうち対象の点の位置が含まれるボクセルに対象の点を対応付けることにより、前記点群データに対応するボクセルデータを生成するボクセル化部と、
前記複数のボクセルそれぞれについて、対応付けされた点の有無に基づき、前記ボクセル化部によって生成された前記ボクセルデータと基準データとの間で差分がある差分セルを特定する差分特定部であって、前記基準データで点が対応付けされたボクセルを前記差分セルとして特定せず、前記基準データでは点が対応付けされておらず、かつ、前記ボクセルデータでは点が対応付けされているボクセルを前記差分セルとして特定する差分特定部と
を備える。
【発明の効果】
【0008】
本開示では、対象領域を分割した複数のボクセルに各点を対応付け、ボクセル毎に対応付けされた点の有無に基づき差分を特定する。これにより、照射光の照射位置に若干のずれが生じた場合にも、適切に対象物を検知可能である。特に、本開示では、基準データで点が対応付けされたボクセルを差分セルとして特定せず、基準データでは点が対応付けされておらず、かつ、ボクセルデータでは点が対応付けされているボクセルを差分セルとして特定する。これにより、基準データを取得するときに照射光を照射する光センサの前を横切った物体が検知されないようにすることが可能である。
【図面の簡単な説明】
【0009】
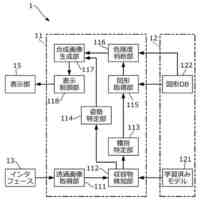
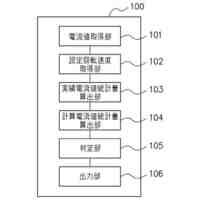
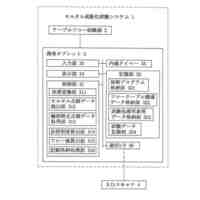
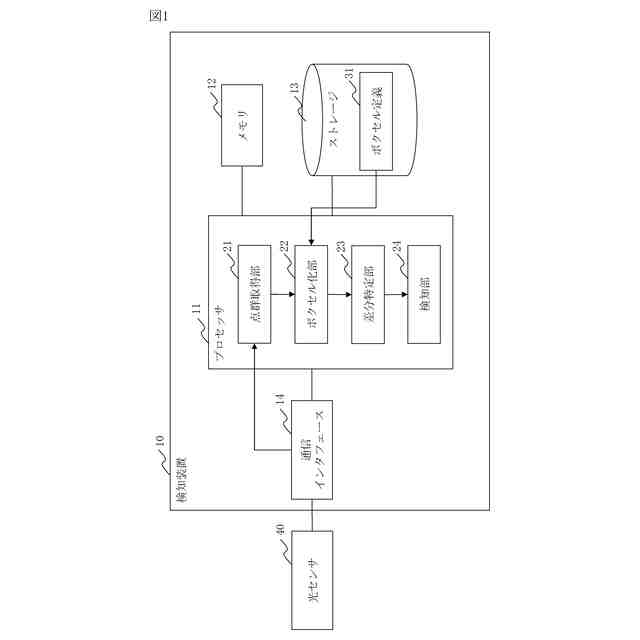
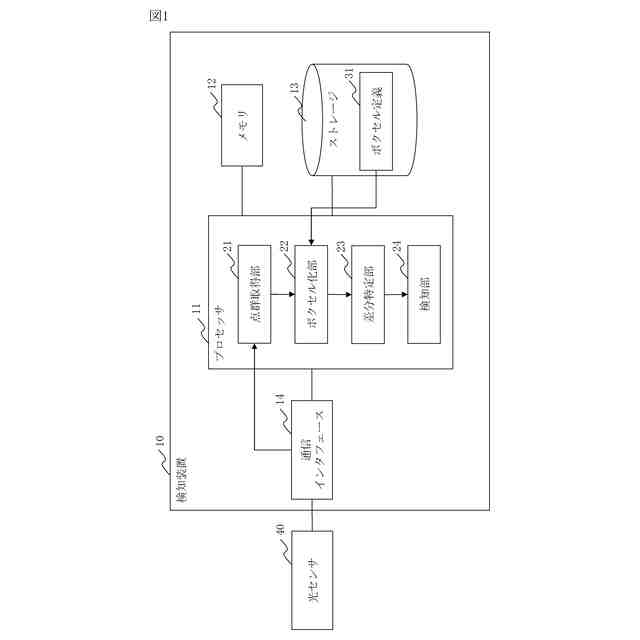
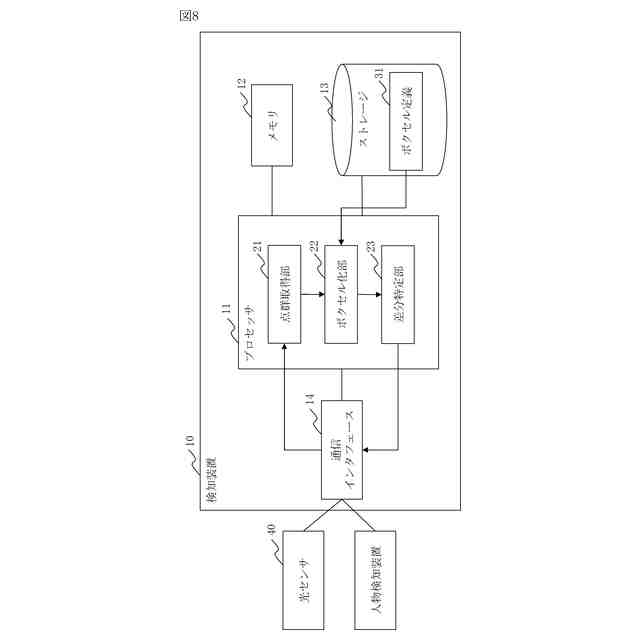
実施の形態1に係る検知装置10の構成図。
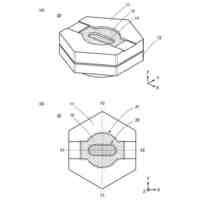
実施の形態1に係るボクセル定義31の説明図。
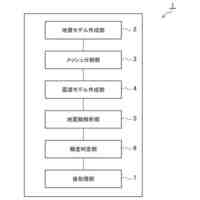
実施の形態1に係る検知装置10の処理の流れを示すフローチャート。
実施の形態1に係るボクセル化処理の説明図。
実施の形態1に係る差分特定処理の説明図。
実施の形態1に係る第1フィルタリング処理の説明図。
実施の形態1に係る第2フィルタリング処理の説明図。
変形例1に係る検知装置10の構成図。
変形例1に係る検知装置10の処理の流れを示すフローチャート。
実施の形態2に係る検知装置10の構成図。
実施の形態2に係る検知装置10の処理の流れを示すフローチャート。
実施の形態3に係る検知装置10の構成図。
実施の形態3に係る検知装置10の処理の流れを示すフローチャート。
実施の形態4に係る検知装置10の構成図。
実施の形態4に係るマスク定義34の説明図。
実施の形態4に係る検知装置10の処理の流れを示すフローチャート。
【発明を実施するための形態】
【0010】
実施の形態1.
***構成の説明***
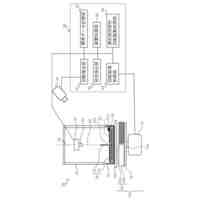
図1を参照して、実施の形態1に係る検知装置10の構成を説明する。
検知装置10は、コンピュータである。
検知装置10は、プロセッサ11と、メモリ12と、ストレージ13と、通信インタフェース14とのハードウェアを備える。プロセッサ11は、信号線を介して他のハードウェアと接続され、これら他のハードウェアを制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
位置検出装置
6日前
エイブリック株式会社
電流検出回路
3日前
東レ株式会社
シート状物の検査方法
4日前
株式会社チノー
放射光測温装置
3日前
東ソー株式会社
自動分析装置及び方法
6日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
株式会社 キョーワ
食品搬送装置
3日前
日本碍子株式会社
ガスセンサ
3日前
富士電機株式会社
エンコーダ
4日前
株式会社ヨコオ
シートコンタクタ
6日前
TDK株式会社
温度センサ
4日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
オムロン株式会社
光電センサ
3日前
シチズンファインデバイス株式会社
圧力検出装置
3日前
TDK株式会社
センサデバイス
3日前
株式会社ミツバ
モータ制御装置
3日前
旭光電機株式会社
電気的特性提供装置
3日前
セイコーエプソン株式会社
干渉計
6日前
JRCモビリティ株式会社
充電用温度判定回路
6日前
日本信号株式会社
表示装置
4日前
TDK株式会社
センサ
4日前
内山工業株式会社
分析装置用部材
5日前
株式会社オーケープランニング
スパン調整法
3日前
日東建設株式会社
ボルト・ナットの健全性検査装置
9日前
大陽日酸株式会社
試験体の熱特性を測定する試験装置
3日前
株式会社SUBARU
蓄電池の状態センサ装置
6日前
株式会社半導体エネルギー研究所
分析用セル及びX線回折装置
3日前
ミネベアミツミ株式会社
角度センサ及び回転機器
3日前
日本製鉄株式会社
回転機械の異常診断支援方法及び装置
4日前
国立大学法人 東京大学
粘性の測定装置及び方法
5日前
株式会社ケー・エフ・シー
モルタル流動性試験システム
9日前
大成建設株式会社
地震動解析システム
4日前
株式会社エヌテック
物品検査装置及び物品検査方法
4日前
国立大学法人島根大学
検査方法及び検査装置
4日前
SWCC株式会社
温度測定方法
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ