TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043057
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150359
出願日
2023-09-15
発明の名称
システムおよび装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B23P
21/00 20060101AFI20250321BHJP(工作機械;他に分類されない金属加工)
要約
【課題】移動体に部品を組付ける作業の作業性を高める。
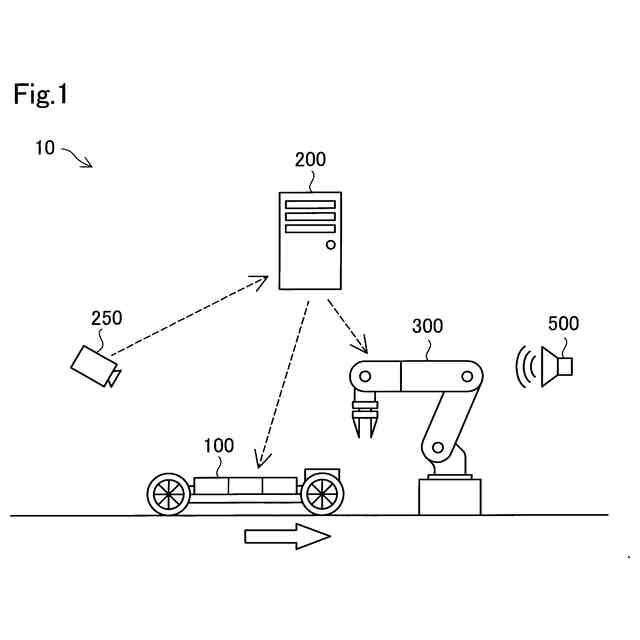
【解決手段】システム10は、無人運転により移動可能な移動体(車両100)に対する作業に用いられる作業装置(組付ロボット300)と、外部センサ250と、報知装置500を備え、部品の組付作業が実行される作業装置(組付ロボット300)が配置されている作業場所に無人運転により移動する移動体(車両100)が走行し、少なくとも一方の制御に、他方の動作に関する動作情報を反映させることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
システムであって、
無人運転により移動可能な移動体に対する作業に用いられる作業装置と、前記作業装置が配置されている作業場所に無人運転により移動する前記移動体との少なくとも一方の制御に、他方の動作に関する動作情報を反映させることを特徴とする、システム。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のシステムであって、
前記移動体の動作に関する前記動作情報を取得する取得部と、
前記動作情報に応じて前記作業装置を制御する制御部と、
を備える、システム。
【請求項3】
請求項1に記載のシステムであって、
前記作業装置の動作に関する前記動作情報を取得する取得部と、
前記動作情報に応じて前記移動体を制御する制御部と、
を備える、システム。
【請求項4】
装置であって、
無人運転により移動中の移動体の動作に関する動作情報を取得する取得部と、
前記動作情報に応じて、移動中の前記移動体に部品を組付ける作業装置の制御に用いられる作業装置制御情報を生成する生成部と、
前記作業装置に対して前記作業装置制御情報を送信する送信部と、
を備える、装置。
【請求項5】
請求項4に記載の装置であって、
前記作業装置は、前記部品を把持するアーム部と、前記アーム部を制御する制御部とを備え、
前記生成部は、前記アーム部の制御に用いられるパラメータを含む前記作業装置制御情報を生成し、
前記制御部は、前記パラメータを用いて、前記アーム部を制御する、装置。
【請求項6】
請求項4に記載の装置であって、
前記生成部は、さらに、前記移動体の制御に用いられる移動体制御情報を生成する、装置。
【請求項7】
請求項4に記載の装置であって、
前記生成部は、前記移動体の動作が予め定められた条件を満たす場合に、前記移動体を停止させる命令と、前記作業装置を停止させる命令と、異常が発生したことを報知させる命令と、の少なくとも1つを生成する、装置。
【請求項8】
無人運転により移動可能な移動体に部品を組付ける装置であって、
前記部品を把持するアーム部と、
移動中の前記移動体の動作を検出するセンサと、
前記センサの検出結果に応じて前記アーム部を制御する制御部と、
を備える、装置。
【請求項9】
無人運転により移動可能な移動体に部品を組付ける装置であって、
前記部品を把持するアーム部と、
前記移動体に搭載されている、無人運転により移動中の前記移動体の動作を検出するセンサから、前記センサの検出結果を取得する取得部と、
前記検出結果に応じて前記アーム部を制御する制御部と、
を備える、装置。
【請求項10】
装置であって、
無人運転により移動中の移動体に部品を組付ける作業装置の動作に関する動作情報を取得する取得部と、
前記動作情報に応じて、前記移動体の制御に用いられる移動体制御情報を生成する生成部と、
前記移動体に対して前記移動体制御情報を送信する送信部と、
を備える、装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、システムおよび装置に関する。
続きを表示(約 6,900 文字)
【背景技術】
【0002】
車両の製造工程において、無人運転により車両を走行させる技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両等の移動体の製造工程において、移動体をコンベア等により搬送するのではなく無人運転により移動させる場合、移動体に部品の組付ける作業の作業性を高めるための工夫の余地がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の第1の形態によれば、システムが提供される。このシステムは、無人運転により移動可能な移動体に対する作業に用いられる作業装置と、前記作業装置が配置されている作業場所に無人運転により移動する前記移動体との少なくとも一方の制御に、他方の動作に関する動作情報を反映させることを特徴とする。
この形態のシステムによれば、移動体と作業装置とを協働させることができるため、作業装置を用いた移動体に対する作業の作業効率を高めることができる。
(2)上記形態のシステムは、前記移動体の動作に関する前記動作情報を取得する取得部と、前記動作情報に応じて前記作業装置を制御する制御部と、を備えてもよい。
この形態のシステムによれば、移動体の動作に応じて作業装置を動作させることができるため、作業装置を用いた移動体に対する作業の作業効率を高めることができる。
(3)上記形態のシステムは、前記作業装置の動作に関する前記動作情報を取得する取得部と、前記動作情報に応じて前記移動体を制御する制御部と、を備えてもよい。
この形態のシステムによれば、作業装置の動作に応じて移動体を動作させることができるため、作業装置を用いた移動体に対する作業の作業効率を高めることができる。
(4)本開示の第2の形態によれば、装置が提供される。この装置は、無人運転により移動中の移動体の動作に関する動作情報を取得する取得部と、前記動作情報に応じて、移動中の前記移動体に部品を組付ける作業装置の制御に用いられる作業装置制御情報を生成する生成部と、前記作業装置に対して前記作業装置制御情報を送信する送信部と、を備える。
この形態の装置によれば、移動体の動作に応じて作業装置を動作させることができるため、移動中の移動体に対して作業装置により部品を適切に組付けることができる。したがって、移動体に対する部品の組付け作業の作業効率を高めることができる。
(5)上記形態の装置において、前記作業装置は、前記部品を把持するアーム部と、前記アーム部を制御する制御部とを備え、前記生成部は、前記アーム部の制御に用いられるパラメータを含む前記作業装置制御情報を生成し、前記制御部は、前記パラメータを用いて、前記アーム部を制御してもよい。
この形態の装置によれば、作業装置制御情報を作業装置に送信することにより、アーム部を動作させることができる。
(6)上記形態の装置において、前記生成部は、さらに、前記移動体の制御に用いられる移動体制御情報を生成してもよい。
この形態の装置によれば、1台の装置により移動体制御情報と作業装置制御情報とを生成することができる。
(7)上記形態の装置において、前記生成部は、前記移動体の動作が予め定められた条件を満たす場合に、前記移動体を停止させる命令と、前記作業装置を停止させる命令と、異常が発生したことを報知させる命令と、の少なくとも1つを生成してもよい。
この形態の装置によれば、移動体の動作に異常が発生した可能性がある場合に、適切に対処することができる。
(8)本開示の第2の形態によれば、無人運転により移動可能な移動体に部品を組付ける装置が提供される。この装置は、前記部品を把持するアーム部と、移動中の前記移動体の動作を検出するセンサと、前記センサの検出結果に応じて前記アーム部を制御する制御部と、を備える。
この形態の装置によれば、移動中の移動体に対して部品を適切に組付けることができる。したがって、移動体に対する部品の組付け作業の作業効率を高めることができる。
(9)本開示の第3の形態によれば、無人運転により移動可能な移動体に部品を組付ける装置が提供される。この装置は、前記部品を把持するアーム部と、前記移動体に搭載されている、無人運転により移動中の前記移動体の動作を検出するセンサから、前記センサの検出結果を取得する取得部と、前記検出結果に応じて前記アーム部を制御する制御部と、を備える。
この形態の装置によれば、移動中の移動体に対して部品を適切に組付けることができる。したがって、移動体に対する部品の組付け作業の作業効率を高めることができる。
(10)本開示の第4の形態によれば、装置が提供される。この装置は、無人運転により移動中の移動体に部品を組付ける作業装置の動作に関する動作情報を取得する取得部と、前記動作情報に応じて、前記移動体の制御に用いられる移動体制御情報を生成する生成部と、前記移動体に対して前記移動体制御情報を送信する送信部と、を備える。
この形態の装置によれば、作業装置の動作に応じて移動体を動作させることができるため、移動中の移動体に対して作業装置により部品を適切に組付けることができる。したがって、移動体に対する部品の組付け作業の作業効率を高めることができる。
(11)上記形態の装置において、前記生成部は、前記移動体に前記部品を組付ける時の前記移動体と前記部品との相対速度が予め定められた範囲内になるように前記移動体を制御するための、前記移動体制御情報を生成してもよい。
この形態の装置によれば、移動体に部品が組付けられる時の衝撃を低減することができる。
(12)上記形態の装置において、前記生成部は、前記移動体に前記部品を組付ける時の前記相対速度が前記範囲内になっていない場合には、前記移動体を停止させる命令と、前記作業装置を停止させる命令と、異常が発生したことを報知させる命令と、の少なくとも1つを生成してもよい。
この形態の装置によれば、部品の組付け不良が発生する可能性がある場合に、適切に対処することができる。
(13)本開示の第5の形態によれば、移動体に搭載されている装置が提供される。この装置は、移動中の前記移動体に部品を組付ける作業装置の動作に関する動作情報を取得する取得部と、前記動作情報に応じて、前記移動体を制御する制御部と、を備える。
この形態の装置によれば、作業装置の動作に応じて移動体を動作させることができるため、移動中の移動体に対して作業装置により部品を適切に組付けることができる。したがって、移動体に対する部品の組付け作業の作業効率を高めることができる。
(14)本開示の第6の形態によれば、装置が提供される。この装置は、無人運転により移動可能な移動体の動作に関する動作情報を取得する取得部と、前記動作情報に応じて、無人運転により作業場所で停止している前記移動体に部品を組付ける作業装置の制御に用いられる作業装置制御情報を生成する生成部と、を備える。
この形態の装置によれば、移動体の動作に応じて作業装置を動作させることができるため、停止中の移動体に対して作業装置により部品を適切に組付けることができる。したがって、移動体に対する部品の組付け作業の作業効率を高めることができる。
(15)本開示の第7の形態によれば、装置が提供される。この装置は、無人運転により移動可能な移動体に部品を組付ける作業装置の動作であって、無人運転により作業場所で停止している前記移動体に前記部品を組付ける動作に関する動作情報を取得する取得部と、前記動作情報に応じて、前記移動体を前記作業場所に停止させる制御に用いられる移動体制御情報を生成する生成部と、を備える。
この形態の装置によれば、作業装置の動作に応じて移動体を動作させることができるため、停止中の移動体に対して作業装置により部品を適切に組付けることができる。したがって、移動体に対する部品の組付け作業の作業効率を高めることができる。
(16)本開示の第8の形態によれば、装置が提供される。この装置は、無人運転により移動可能な移動体の動作に関する動作情報を取得する取得部と、前記動作情報に応じて、無人運転により移動可能な作業装置であって、前記移動体に組付けられる部品と前記移動体に対する作業に用いられる工具との少なくとも一方を積載可能な作業装置の制御に用いられる作業装置制御情報を生成する生成部と、前記作業装置に前記作業装置制御情報を送信する送信部と、を備える。
この形態の装置によれば、作業対象の移動体の動作に応じて作業装置を移動させることができる。そのため、作業装置から部品や工具を取り出して移動体に対する作業を実施する作業員の作業効率を高めることができる。
(17)上記形態の装置において、前記生成部は、前記作業装置と前記移動体との相対速度が予め定められた範囲内になるように、前記作業装置制御情報を生成してもよい。
この形態の装置によれば、作業装置と移動体との間の距離が変化することを抑制できる。そのため、作業員の作業効率を効果的に高めることができる。
(18)上記形態の装置において、前記生成部は、前記移動体に対する作業が終了したと判定した場合には、前記移動体の後に作業が実施される後続移動体に接近させる前記作業装置制御情報を生成してもよい。
この形態の装置によれば、作業員が手動で作業装置を後続移動体に近付ける手間をなくすことができる。そのため、作業員の作業効率を効果的に高めることができる。
(19)上記形態の装置において、前記取得部は、前記作業装置が前記後続移動体に接近中に、または、前記作業装置が前記後続移動体に予め定められた距離以内まで接近した後に、前記後続移動体の動作に関する動作情報を取得し、前記生成部は、前記後続移動体の動作情報に応じて、前記作業装置制御情報を生成してもよい。
この形態の装置によれば、適切なタイミングで移動体の動作を取得することができる。
(20)上記形態の装置において、前記生成部は、前記移動体に対する作業が終了したと判定し、かつ、前記後続移動体が存在しないと判定した場合には、前記作業装置を停止させる前記作業装置制御情報を生成してもよい。
この形態の装置によれば、後続移動体が存在しないにもかかわらず、作業装置の移動が継続されてエネルギが無駄に消費されることを抑制できる。
(21)本開示の第9の形態によれば、無人運転により移動可能な作業装置が提供される。この作業装置は、無人運転により移動可能な移動体に組付けられる部品と前記移動体に対する作業に用いられる工具との少なくとも一方を積載可能な荷台と、移動するための駆動装置と、前記移動体に搭載されているセンサの検出結果を取得する取得部と、前記検出結果に応じて前記駆動装置を制御する制御部と、を備える。
この形態の作業装置によれば、作業対象の移動体の動作に応じて作業装置を移動させることができる。そのため、作業装置から部品や工具を取り出して移動体に対する作業を実施する作業員の作業効率を高めることができる。
(22)本開示の第10の形態によれば、無人運転により移動可能な作業装置が提供される。この作業装置は、無人運転により移動可能な移動体に組付けられる部品と前記移動体に対する作業に用いられる工具との少なくとも一方を積載可能な荷台と、移動するための駆動装置と、前記移動体の動作を検出するためのセンサと、前記センサの検出結果に応じて、前記駆動装置を制御する制御部と、を備える。
この形態の作業装置によれば、作業対象の移動体の動作に応じて作業装置を移動させることができる。そのため、作業装置から部品や工具を取り出して移動体に対する作業を実施する作業員の作業効率を高めることができる。
本開示は、システムおよび装置以外の種々の形態で実現することも可能である。例えば、方法、コンピュータプログラム、および、コンピュータプログラムが記録された記録媒体などの形態で実現することができる。
【図面の簡単な説明】
【0007】
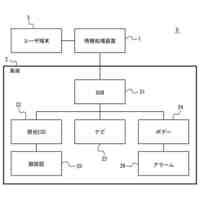
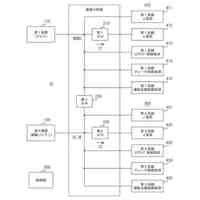
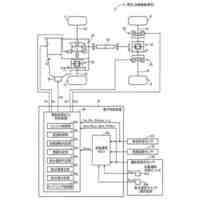
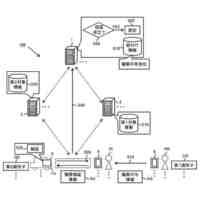
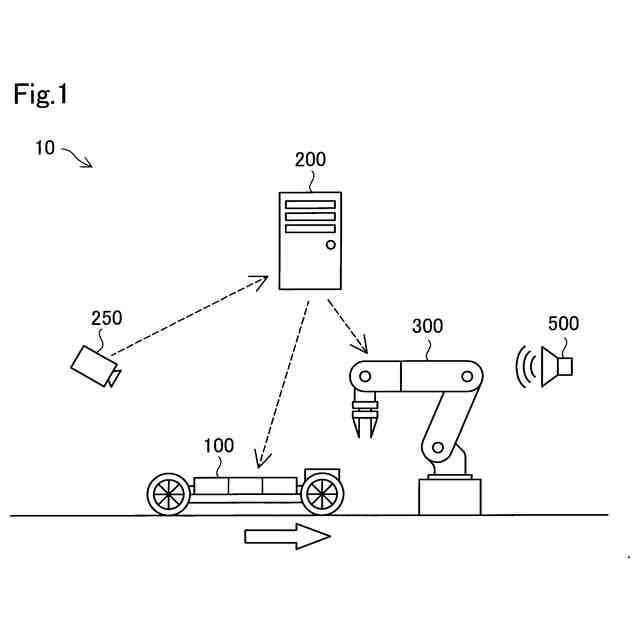
第1実施形態のシステムの構成を示す説明図。
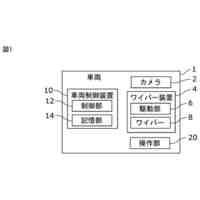
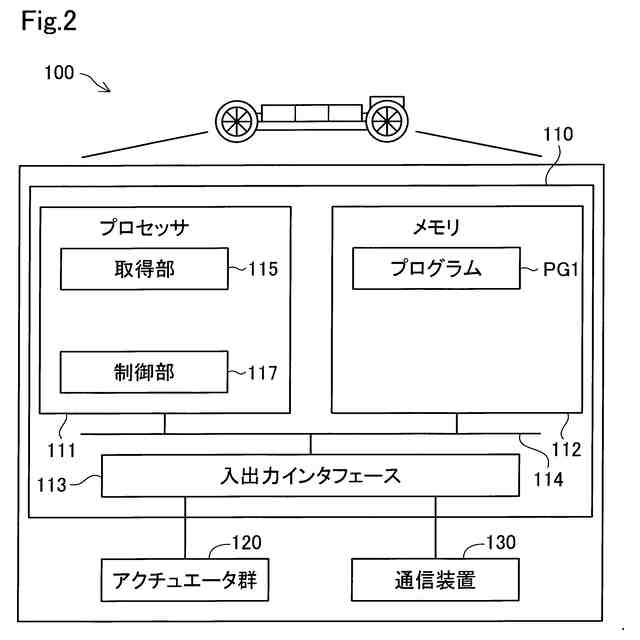
第1実施形態の車両の構成を示す説明図。
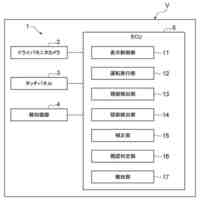
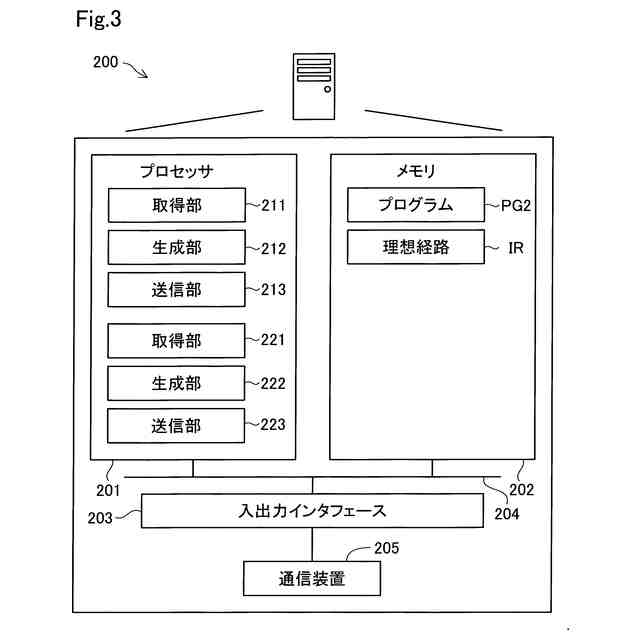
第1実施形態のサーバ装置の構成を示す説明図。
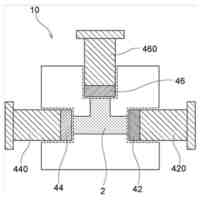
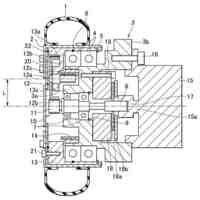
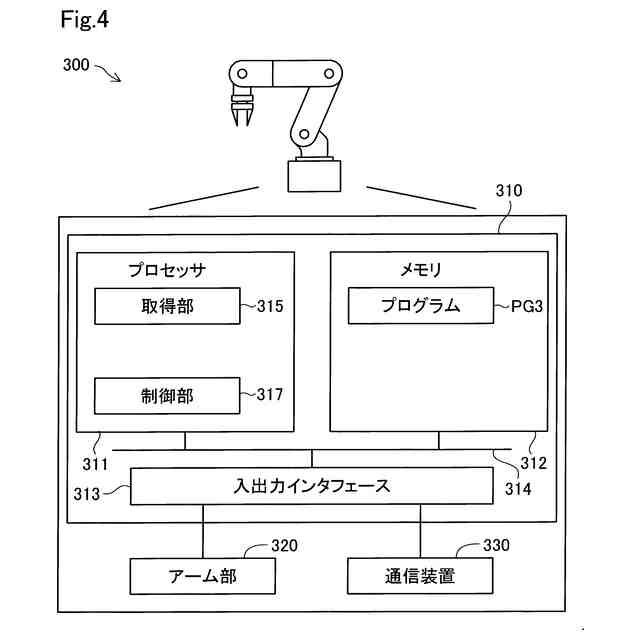
第1実施形態の組付ロボットの構成を示す説明図。
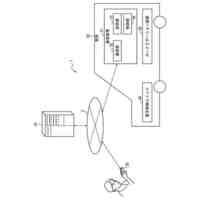
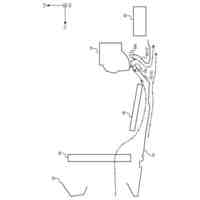
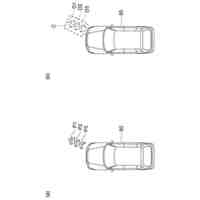
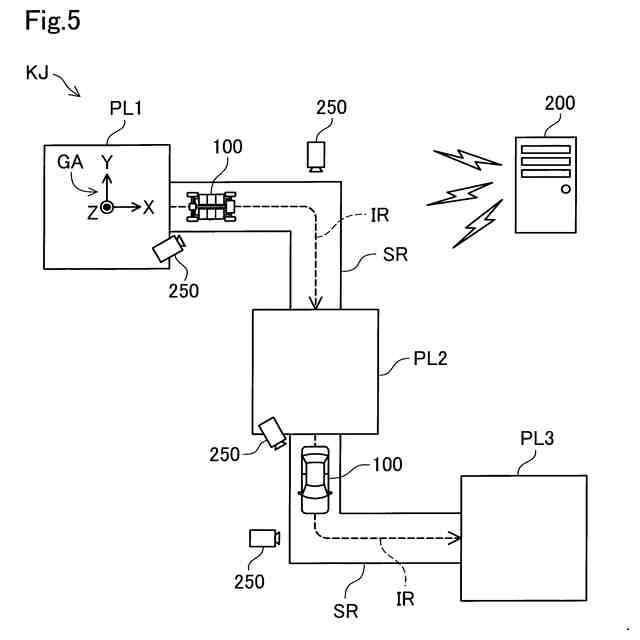
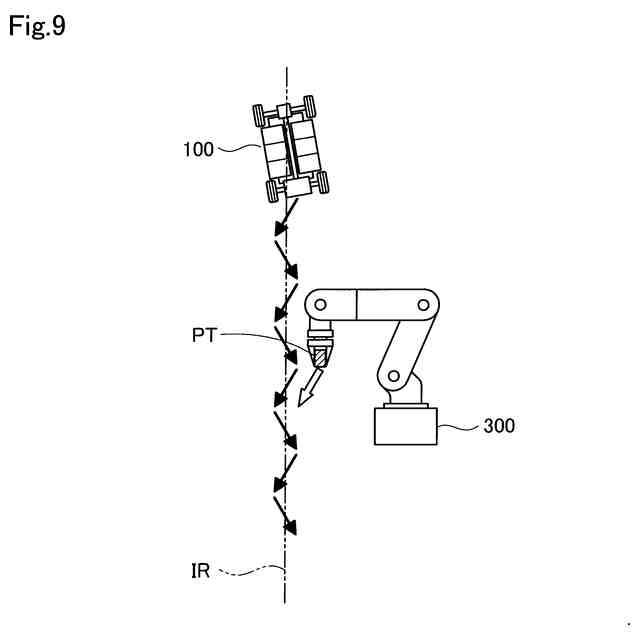
工場において車両が無人運転により走行する様子を示す説明図。
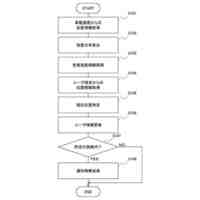
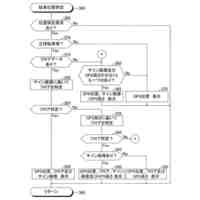
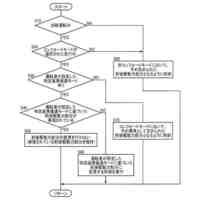
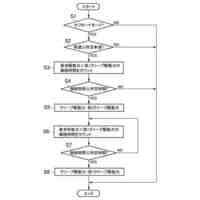
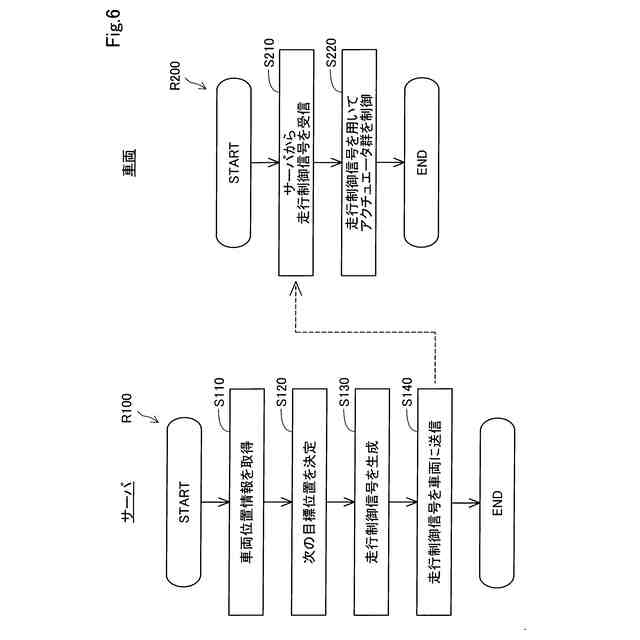
第1実施形態の車両制御の処理手順を示すフローチャート。
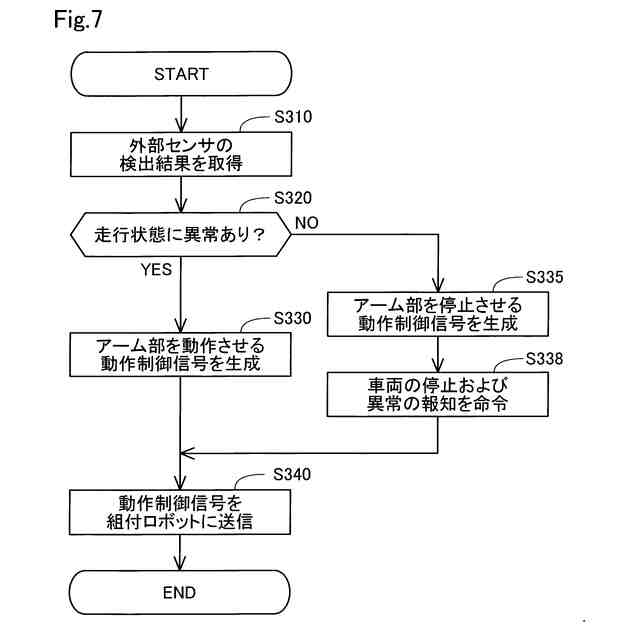
第1実施形態の組付ロボット制御の処理手順を示すフローチャート。
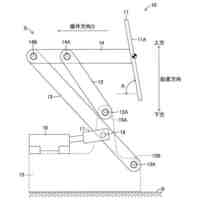
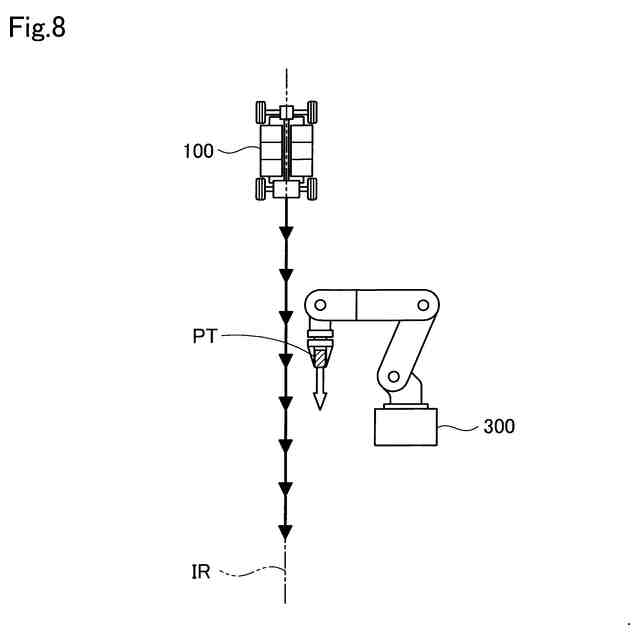
組付ロボットの動作を示す第1の説明図。
組付ロボットの動作を示す第2の説明図。
組付ロボットの動作を示す第3の説明図。
第2実施形態のシステムの構成を示す説明図。
第2実施形態の組付ロボットの構成を示す説明図。
第2実施形態の組付ロボット制御の処理手順を示すフローチャート。
第3実施形態のシステムの構成を示す説明図。
第3実施形態の車両の構成を示す説明図。
第3実施形態の組付ロボットの構成を示す説明図。
第4実施形態のシステムの構成を示す説明図。
第5実施形態のシステムの構成を示す説明図。
第6実施形態のシステムの構成を示す説明図。
第7実施形態のシステムの構成を示す説明図。
第7実施形態のワゴンの構成を示す説明図。
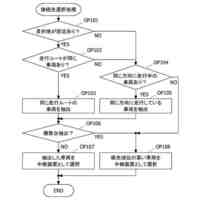
第7実施形態のワゴン制御の処理手順を示すフローチャート。
ワゴンの動作を示す説明図。
第8実施形態のシステムの構成を示す説明図。
第8実施形態のワゴンの構成を示す説明図。
第9実施形態のシステムの構成を示す説明図。
第9実施形態のワゴンの構成を示す説明図。
他の実施形態の車両制御の処理手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1は、第1実施形態におけるシステム10の構成を示す説明図である。システム10は、例えば、車両100を製造する工場において用いられる。本実施形態では、車両100は、電気自動車(BEV:Battery Electric Vehicle)である。なお、車両100は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。
【0009】
システム10は、車両100と、サーバ装置200と、少なくとも1つの外部センサ250と、組付ロボット300と、報知装置500とを備えている。車両100は、無人運転により走行可能に構成されている。車両100は、製造途中の状態であり、無人運転により走行している車両100に対して組付ロボット300により部品の組付け作業が実行される。本実施形態では、車両100は、いわゆるプラットフォームの形態で無人運転により走行する。なお、車両100のことを移動体と呼び、組付ロボット300のことを作業装置と呼ぶことがある。
【0010】
本開示では、「無人運転」とは、車両100に搭乗している搭乗者の運転操作によらない運転のことを意味する。「運転操作」とは、車両100の「走る」、「曲がる」、「止まる」の少なくとも1つに関する操作のことを意味する。無人運転は、車両100の外部に位置している装置を用いた自動または手動の遠隔制御により、あるいは、車両100の自律制御により実現される。無人運転により走行している車両100には、運転操作を行わない搭乗者が搭乗していてもよい。運転操作を行わない搭乗者には、例えば、単に車両100の運転席に座っている者や、運転操作とは異なる行動を行っている者が含まれる。運転操作とは異なる行動には、例えば、車両100に対する部品の組付け作業や、車両100の検査や、車両100に設けられているスイッチ類の操作などが含まれる。なお、搭乗者の運転操作による運転のことを、「有人運転」と呼ぶことがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
通信装置
1日前
トヨタ自動車株式会社
冷却システム
1日前
トヨタ自動車株式会社
作業評価装置
2日前
トヨタ自動車株式会社
車体前部構造
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
劣化検知方法
2日前
トヨタ自動車株式会社
充電制御装置
1日前
トヨタ自動車株式会社
電池の製造方法
2日前
トヨタ自動車株式会社
アンダーカバー
1日前
トヨタ自動車株式会社
自動駐車システム
2日前
トヨタ自動車株式会社
車両電源システム
2日前
トヨタ自動車株式会社
コイルの製造方法
2日前
トヨタ自動車株式会社
駐車位置特定装置
1日前
トヨタ自動車株式会社
ステアリング構造
2日前
トヨタ自動車株式会社
車両用ペダル装置
2日前
トヨタ自動車株式会社
車両用車輪支持装置
1日前
トヨタ自動車株式会社
車両用車輪支持装置
1日前
トヨタ自動車株式会社
電池セルの接続構造
2日前
トヨタ自動車株式会社
車両用車輪支持装置
1日前
トヨタ自動車株式会社
蓄電装置の製造方法
1日前
トヨタ自動車株式会社
ステアリングハンドル
1日前
トヨタ自動車株式会社
車両周辺監視システム
1日前
トヨタ自動車株式会社
四輪駆動車両の制御装置
2日前
トヨタ自動車株式会社
四輪駆動車両の制御装置
2日前
トヨタ自動車株式会社
システム及びプログラム
1日前
トヨタ自動車株式会社
燃料電池用のガスケット
1日前
トヨタ自動車株式会社
インホイール式駆動装置
2日前
トヨタ自動車株式会社
検査システム及び検査方法
2日前
トヨタ自動車株式会社
電動車両の駆動力制御装置
2日前
トヨタ自動車株式会社
充電システム及び充電方法
2日前
トヨタ自動車株式会社
情報処理装置、及び、方法
1日前
トヨタ自動車株式会社
車両用ステアリングハンドル
1日前
トヨタ自動車株式会社
車両用ステアリングハンドル
1日前
トヨタ自動車株式会社
情報処理装置およびプログラム
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ