TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043051
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150346
出願日
2023-09-15
発明の名称
処理装置、検査システム、処理方法及びプログラム
出願人
株式会社東芝
代理人
弁理士法人酒井国際特許事務所
主分類
G01N
21/84 20060101AFI20250321BHJP(測定;試験)
要約
【課題】検査時間ができるだけ短くなるような軌道を効率的に見つける。
【解決手段】実施形態の処理装置は、検査対象物の表面の形状データを、複数の曲面に分割し、可動体に搭載された検査装置によって前記検査対象物を検査する位置を示す複数の教示点を算出し、前記複数の曲面を遷移する曲面間経路と、前記複数の曲面それぞれの曲面内の教示点を遷移する曲面内経路と、を算出し、前記曲面間経路と、前記曲面内経路と、前記可動体の移動性能とに基づき、前記検査対象物の検査時間がより短くなるように前記可動体の軌道を算出する処理部、を備える。
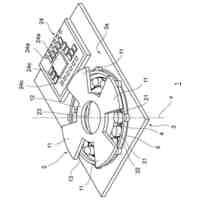
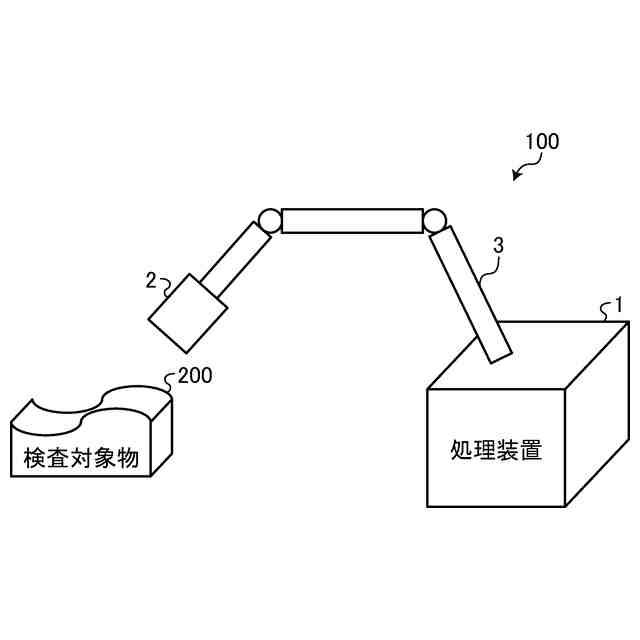
【選択図】図2
特許請求の範囲
【請求項1】
検査対象物の表面の形状データを、複数の曲面に分割し、
可動体に搭載された検査装置によって前記検査対象物を検査する位置を示す複数の教示点を算出し、
前記複数の曲面を遷移する曲面間経路と、前記複数の曲面それぞれの曲面内の教示点を遷移する曲面内経路と、を算出し、
前記曲面間経路と、前記曲面内経路と、前記可動体の移動性能とに基づき、前記検査対象物の検査時間がより短くなるように前記可動体の軌道を算出する処理部、
を備える処理装置。
続きを表示(約 1,600 文字)
【請求項2】
前記可動体の移動性能は、前記曲面の水平方向の移動速度と、前記曲面の垂直方向の移動速度と、前記曲面の平行移動速度と、前記曲面の曲線移動速度と、の内少なくとも一つを含み、
前記検査時間は、前記可動体の軌道が算出されるまでの軌道算出時間と、前記検査対象物を検査するときの前記可動体の動作時間と、を含む、
請求項1に記載の処理装置。
【請求項3】
前記処理部は、前記検査対象物の表面の形状データを、前記表面の形状の曲率の範囲が閾値以下である領域ごとに分割することによって、前記複数の曲面に分割する、
請求項1に記載の処理装置。
【請求項4】
前記処理部は、前記検査対象物の表面の形状データを多角形分割し、
前記検査対象物の表面の形状データを、隣接する多角形の法線ベクトルの角度が閾値以下である多角形の集合に分割することによって、前記複数の曲面に分割する、
請求項1に記載の処理装置。
【請求項5】
前記処理部は、前記可動体の軌道に基づき、前記可動体に搭載された検査装置の位置及び姿勢の少なくとも一方を制御する制御情報を算出する、
請求項1に記載の処理装置。
【請求項6】
検査対象物を検査する検査装置と、
前記検査装置の位置及び姿勢の少なくとも一方を制御する可動体と、
処理装置と、を備え、
前記処理装置は、
前記検査対象物の表面の形状データを、複数の曲面に分割し、
前記検査装置によって前記検査対象物を検査する位置を示す複数の教示点を算出し、
前記複数の曲面を遷移する曲面間経路と、前記複数の曲面それぞれの曲面内の教示点を遷移する曲面内経路と、を算出し、
前記曲面間経路と、前記曲面内経路と、前記可動体の移動性能とに基づき、前記検査対象物の検査時間がより短くなるように、前記可動体の軌道を算出する処理部、
を備える検査システム。
【請求項7】
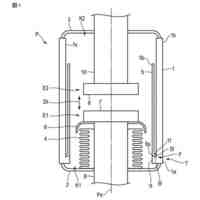
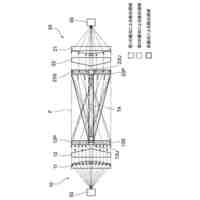
前記検査装置は、
結像光学系と、
前記結像光学系の結像面を形成し、前記結像光学系を通して入射された光を撮像する撮像素子と、
所定の波長範囲の光を透過させる波長選択領域を備えるとともに、前記結像光学系を通して前記撮像素子に入射される光の光路上に配置され、前記波長選択領域を透過した前記所定の波長範囲の光を前記撮像素子に入射させるカラーフィルタと、
を備える請求項6に記載の検査システム。
【請求項8】
前記処理部は、前記可動体の軌道に基づき、前記検査装置の位置及び姿勢の少なくとも一方を制御する制御情報を算出し、
前記可動体は、前記制御情報に基づき、前記検査装置の位置及び姿勢の少なくとも一方を制御することによって、前記検査対象物を検査する、
請求項6に記載の検査システム。
【請求項9】
前記検査対象物は、複数あり、
前記処理部は、複数の前記検査対象物の形状データを順番に受け付け、複数の前記検査対象物の形状データを順番に処理することによって、前記可動体の制御情報を算出し、
前記可動体は、前記制御情報に基づき、前記検査装置の位置及び姿勢の少なくとも一方を制御することによって、複数の前記検査対象物を順番に検査する、
請求項8に記載の検査システム。
【請求項10】
前記検査装置と前記可動体とは、それぞれ複数あり、
前記処理部は、前記複数の曲面に含まれる1以上の曲面の検査を、それぞれの前記検査装置に割り当て、
それぞれの前記検査装置が、前記処理部によって割り当てられた1以上の曲面を検査することによって、前記検査対象物を検査する、
請求項6に記載の検査システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は処理装置、検査システム、処理方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
検査対象物の表面または内部などを検査して、傷などの欠陥を検査する装置が従来から知られている。目視検査の代替手段として、ロボットアームなどの可動体にカメラなどの検査装置を取り付けることにより、検査対象物の検査が行われている。検査対象面すべてを検査するために、可動体の経路(軌道)を適切に作成する必要がある。経路の作成は、一般的に人が教示することが多く、工数がかかる。検査対象物の形状データに基づき計算機により教示を行うことで、人手による工数を削減する検査システムも提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-37333号公報
特開2019-124542号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら従来の技術では、検査時間ができるだけ短くなるような軌道を効率的に見つけることが難しかった。
【課題を解決するための手段】
【0005】
実施形態の処理装置は、検査対象物の表面の形状データを、複数の曲面に分割し、可動体に搭載された検査装置によって前記検査対象物を検査する位置を示す複数の教示点を算出し、前記複数の曲面を遷移する曲面間経路と、前記複数の曲面それぞれの曲面内の教示点を遷移する曲面内経路と、を算出し、前記曲面間経路と、前記曲面内経路と、前記可動体の移動性能とに基づき、前記検査対象物の検査時間がより短くなるように前記可動体の軌道を算出する処理部、を備える。
【図面の簡単な説明】
【0006】
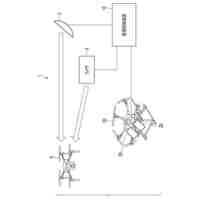
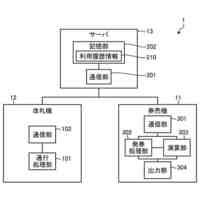
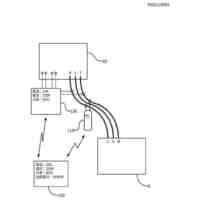
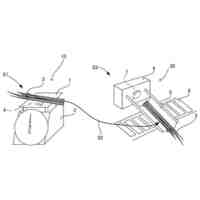
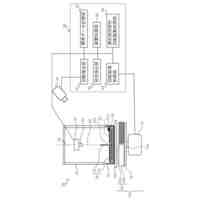
第1実施形態の検査システムの装置構成の例を示す図。
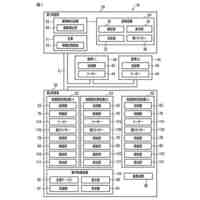
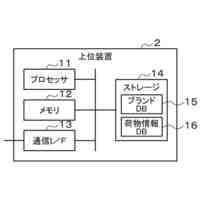
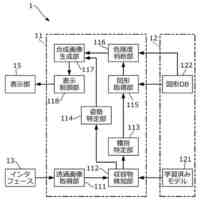
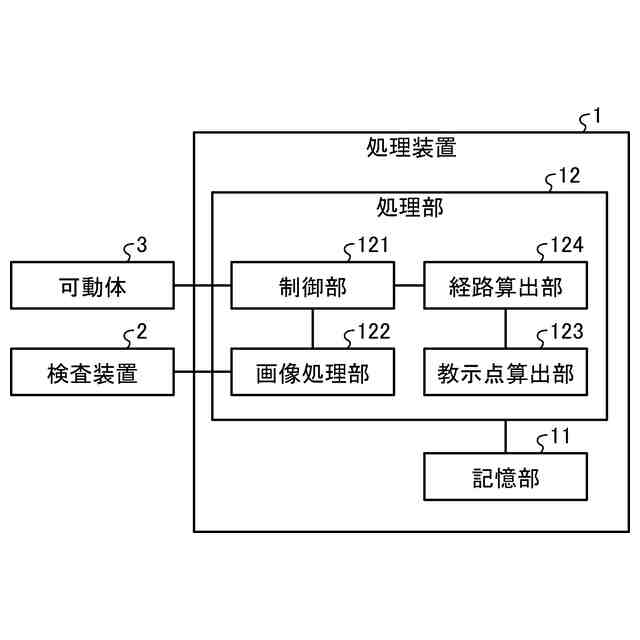
第1実施形態の処理装置の機能構成の例を示す図。
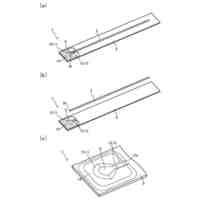
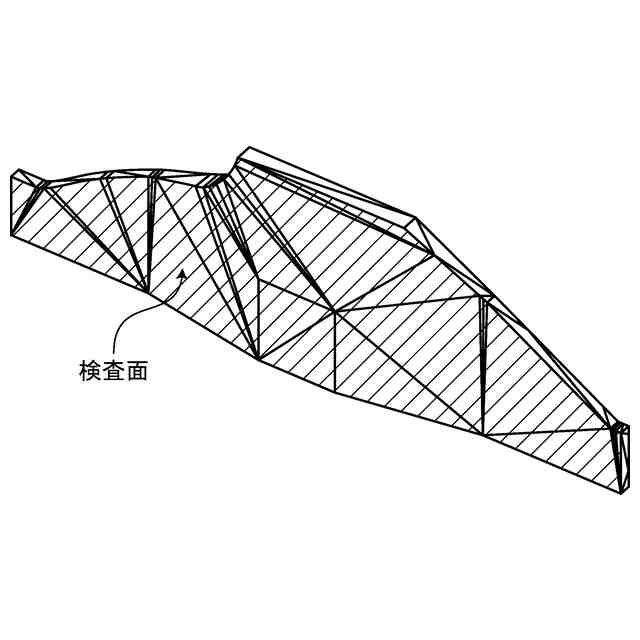
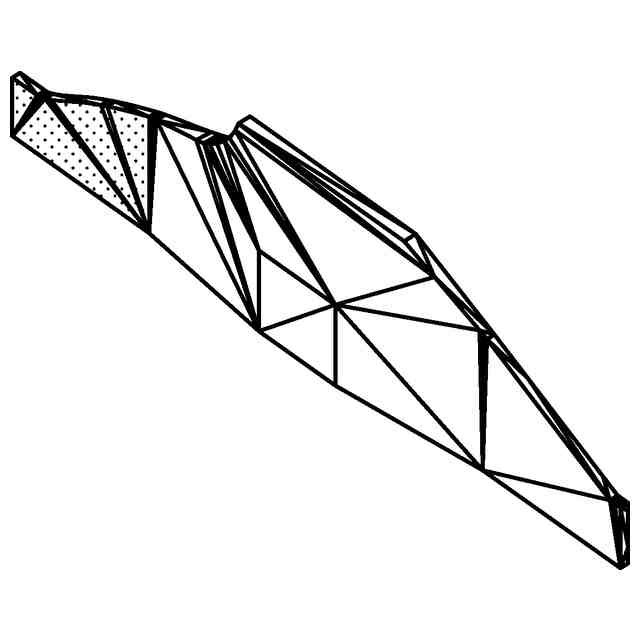
第1実施形態の形状データの例を示す図。
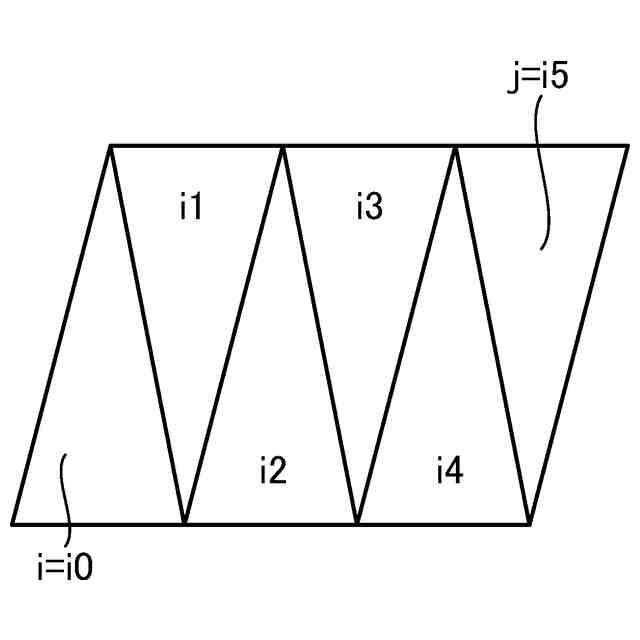
第1実施形態の三角形の集合によって曲面を形成する方法について説明するための図。
第1実施形態の曲面の例1を示す図。
第1実施形態の曲面の例2を示す図。
第1実施形態の曲面の例3を示す図。
第1実施形態の曲面の例4を示す図。
第1実施形態の曲面の例5を示す図。
第1実施形態の曲面の例6を示す図。
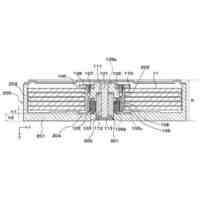
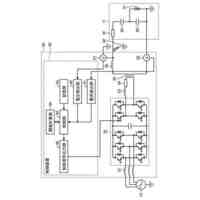
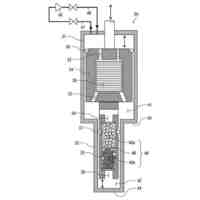
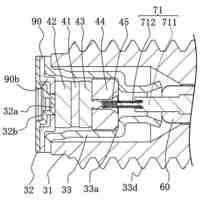
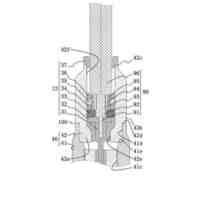
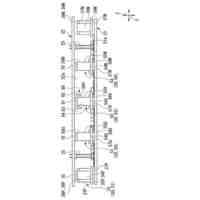
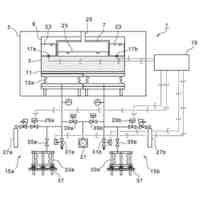
第1実施形態の検査装置の構成の例を示す図。
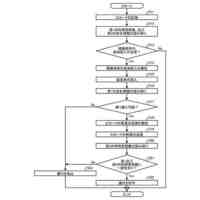
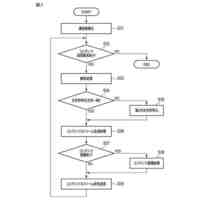
第1実施形態の処理方法の全体フローの例を示すフローチャート。
第1実施形態の複数の曲面に分割する方法(ステップS1の詳細フロー)の例を示すフローチャート。
従来のルールベースで作成された軌道の例1を示す図。
従来のルールベースで作成された軌道の例2を示す図。
第1実施形態の処理装置によって作成された軌道の例1を示す図。
第1実施形態の処理装置によって作成された軌道の例2を示す図。
第2実施形態の検査システムの装置構成の例を示す図。
第3実施形態の検査システムの装置構成の例を示す図。
第4実施形態の検査システムの装置構成の例を示す図。
第1乃至第4実施形態の処理装置のハードウェア構成の例を示す図。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、処理装置、検査システム、処理方法及びプログラムの実施形態を詳細に説明する。
【0008】
少品種多量生産または多品種少量生産などであれば、検査対象物の形状データを取得してから検査工程まで十分な時間および計算資源を用意することが可能であると考えられる、しかし、変種変量生産のように、オンデマンドに生産する製品、または生産量を変化させる生産システムなどである場合、形状データの取得から検査完了までに、限られた時間と計算資源とで教示が行われる必要がある。
【0009】
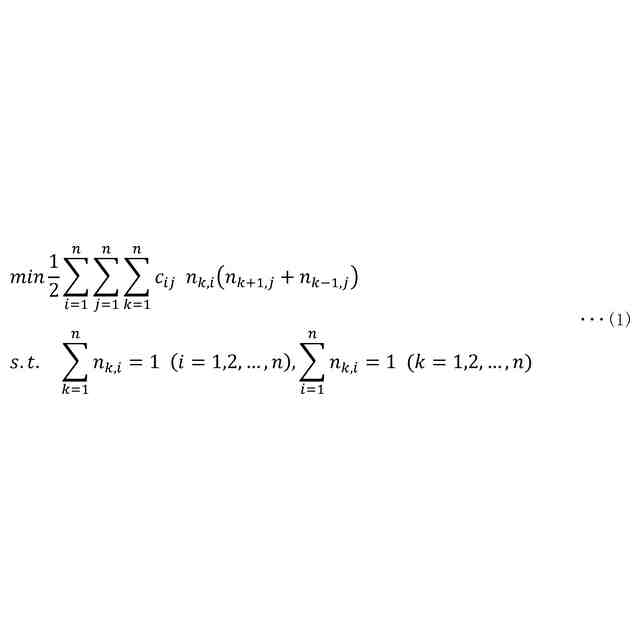
形状データから算出された教示点をすべて通り、かつ、最も短い距離を通る経路を探索する問題は、巡回セールスマン問題と呼ばれる。巡回セールスマン問題は計算量理論でNP困難といわれる、解くのが難しい問題である。そのため、量子アニーリング及び量子コンピュータなどのアルゴリズムまたはハードウェアなどを使用した場合でも、最適解または近似解などを得るのは難しい。
【0010】
上述の経路を探索する問題は、教示点をN点とした場合、全探索の計算量はO(n!)、比較的効率的なアルゴリズムとされる手法を用いてもO(n
2
2
n
)であり、教示点が増えれば加速度的に計算量が増加することが知られている。十分な計算資源または時間がない場合などに、対応可能な検査システムを実現することは難しい。最適解が得えるのは難しいとして、近似解を求めるアルゴリズムが提案されているが、近似解を得るにしても同様で、教示点nを小さくすることが計算量の増加を抑えるのに最も効率的である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
真空バルブ
2日前
株式会社東芝
磁気ディスク装置
2日前
株式会社東芝
紙葉類処理システム
3日前
株式会社東芝
改札装置、及び改札方法
3日前
株式会社東芝
オゾン発生装置用の電源装置
1日前
株式会社東芝
設備内雰囲気監視装置及び方法
2日前
株式会社東芝
情報管理装置および検査システム
3日前
株式会社東芝
ドローン捕獲用ドローン、及びシステム
2日前
株式会社東芝
券売システム、情報提供方法及びプログラム
2日前
株式会社東芝
センサヘッド、配管検査装置、および配管検査方法
3日前
株式会社東芝
MRI装置
今日
株式会社東芝
コンテンツ送信装置および送信方法
今日
株式会社東芝
自動改札システム、自動改札機、サーバ装置、自動改札方法及び自動改札プログラム
3日前
株式会社東芝
セラミックス銅回路基板およびそれを用いた半導体装置
今日
東レ株式会社
シート状物の検査方法
1日前
エイブリック株式会社
電流検出回路
今日
株式会社チノー
放射光測温装置
今日
日本特殊陶業株式会社
ガスセンサ
今日
日本特殊陶業株式会社
ガスセンサ
今日
株式会社 キョーワ
食品搬送装置
今日
富士電機株式会社
エンコーダ
1日前
日本碍子株式会社
ガスセンサ
今日
TDK株式会社
温度センサ
1日前
シチズンファインデバイス株式会社
圧力検出装置
今日
オムロン株式会社
光電センサ
今日
シチズンファインデバイス株式会社
圧力検出装置
今日
旭光電機株式会社
電気的特性提供装置
今日
株式会社ミツバ
モータ制御装置
今日
TDK株式会社
センサデバイス
今日
内山工業株式会社
分析装置用部材
2日前
日本信号株式会社
表示装置
1日前
TDK株式会社
センサ
1日前
株式会社オーケープランニング
スパン調整法
今日
大陽日酸株式会社
試験体の熱特性を測定する試験装置
今日
国立大学法人 東京大学
粘性の測定装置及び方法
2日前
ミネベアミツミ株式会社
角度センサ及び回転機器
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ