TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042332
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149280
出願日
2023-09-14
発明の名称
ドロス位置推定装置、及びドロス位置推定方法
出願人
日本製鉄株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
C23C
2/00 20060101AFI20250319BHJP(金属質材料への被覆;金属質材料による材料への被覆;化学的表面処理;金属質材料の拡散処理;真空蒸着,スパッタリング,イオン注入法,または化学蒸着による被覆一般;金属質材料の防食または鉱皮の抑制一般)
要約
【課題】ドロスの除去の要否を高い信頼性で検知するのに有効な装置を提供する。
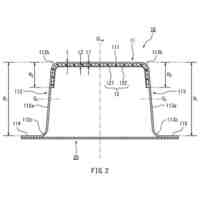
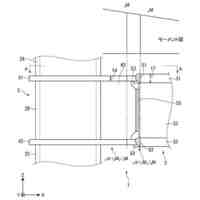
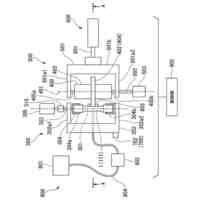
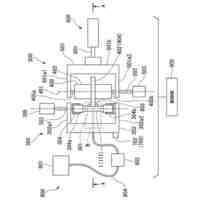
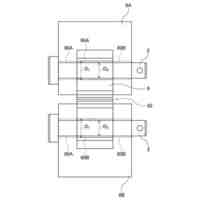
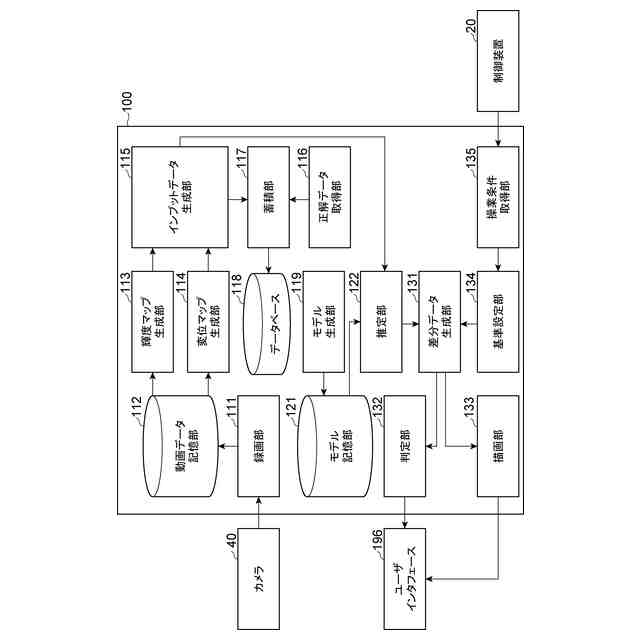
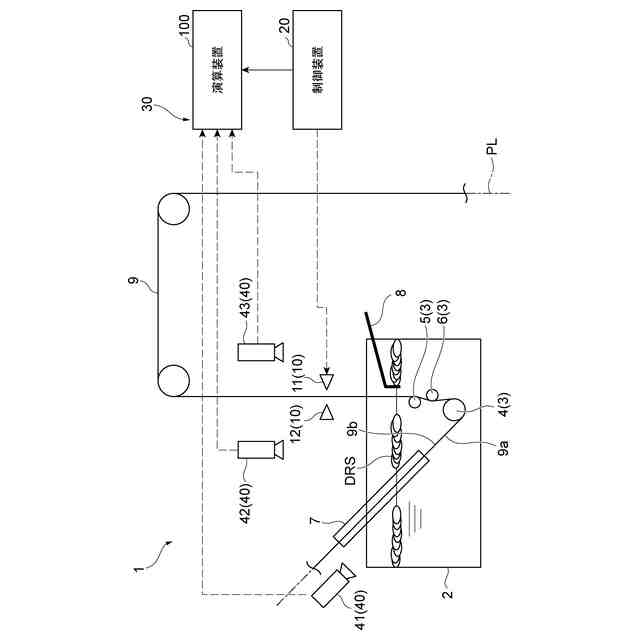
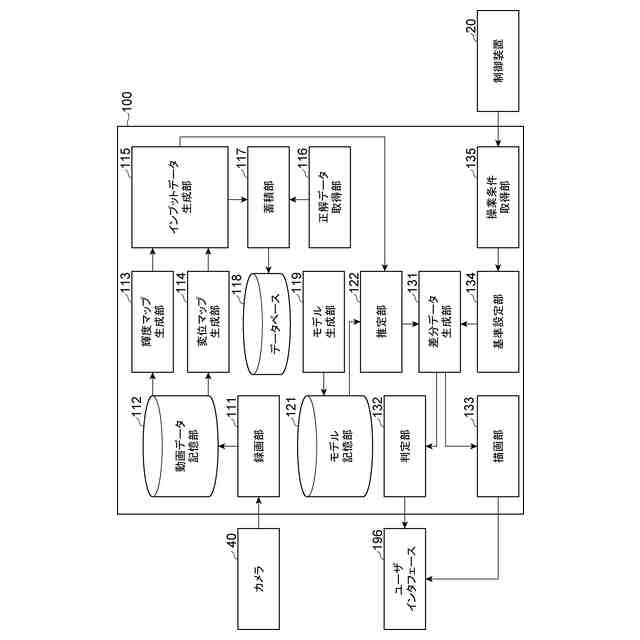
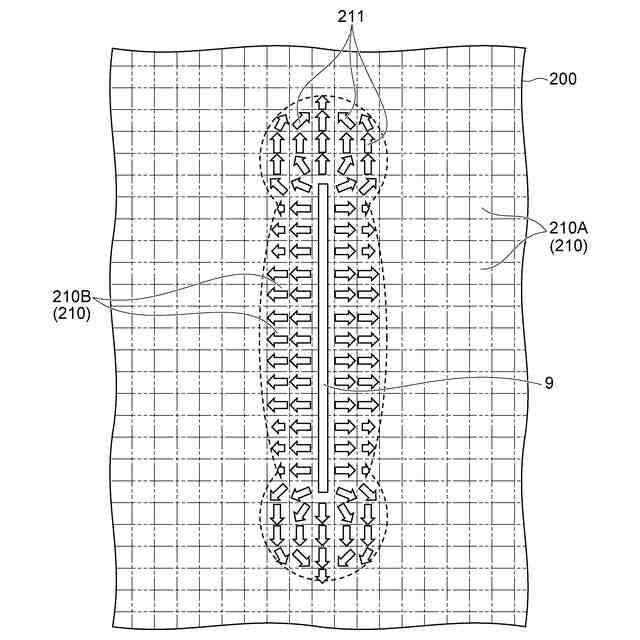
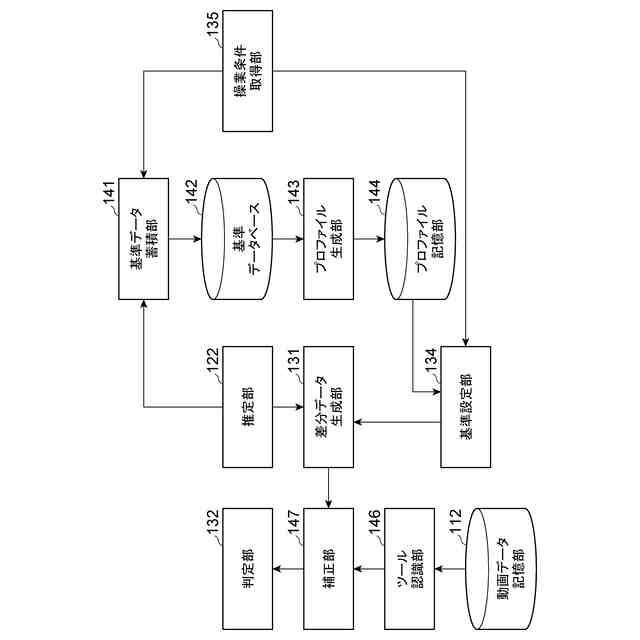
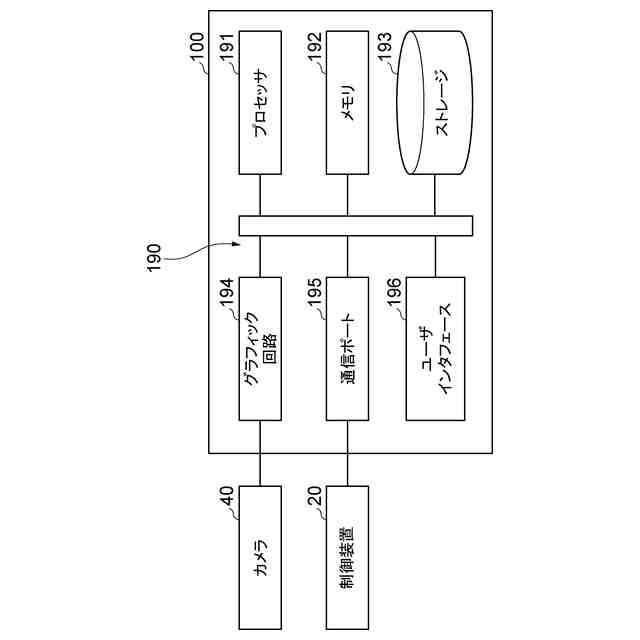
【解決手段】ドロス位置推定装置30は、メッキポット2に収容された液状のメッキ材に、鋼帯を連続で通す連続メッキ装置1において、メッキポット2内のメッキ材の液面を撮影するカメラ40と、カメラ40により時系列で撮影された複数の画像を含む動画データに基づいて、カメラ40の視野における複数のエリアごとに、エリア内の撮影対象の変位ベクトルを表す変位マップを生成する変位マップ生成部114と、変位マップを含むインプットデータと、液面のうちドロスに覆われた領域とドロスに覆われていない領域との境界ラインと、の関係を表すように機械学習により生成された推定モデルと、新たに生成された変位マップを含むインプットデータとに基づいて、境界ラインを推定する推定部122と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
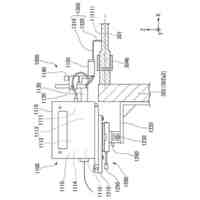
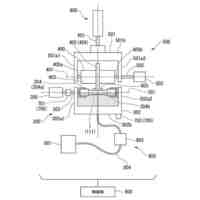
メッキポットに収容された液状のメッキ材に、鋼帯を連続で通す連続メッキ装置において、前記メッキポット内の前記メッキ材の液面を撮影するカメラと、
前記カメラにより時系列で撮影された複数の画像を含む動画データに基づいて、前記カメラの視野における複数のエリアごとに、エリア内の撮影対象の変位ベクトルを表す変位マップを生成する変位マップ生成部と、
前記変位マップを含むインプットデータと、前記液面のうちドロスに覆われた領域と前記ドロスに覆われていない領域との境界ラインと、の関係を表すように機械学習により生成された推定モデルと、新たに生成された前記変位マップを含む前記インプットデータとに基づいて、前記境界ラインを推定する推定部と、
を備えるドロス位置推定装置。
続きを表示(約 1,500 文字)
【請求項2】
予め定められた基準ラインと、推定された前記境界ラインとの差を表す差分データに基づいて、前記ドロスの除去の要否を判定する判定部を更に備える、
請求項1記載のドロス位置推定装置。
【請求項3】
前記境界ラインの推定結果に基づいて、前記基準ラインを設定する基準設定部を更に備え、
前記判定部は、設定された前記基準ラインと、推定された前記境界ラインとの差を表す差分データに基づいて、前記ドロスの除去の要否を判定する、
請求項2記載のドロス位置推定装置。
【請求項4】
少なくとも前記鋼帯の送り速度を含む操業条件と、前記基準ラインとの関係を表すように予め定められた基準プロファイルと、新たに取得された前記操業条件とに基づいて前記基準ラインを設定する基準設定部を更に備え、
前記判定部は、設定された前記基準ラインと、推定された前記境界ラインとの差に基づいて、前記ドロスの除去の要否を判定する、
請求項2記載のドロス位置推定装置。
【請求項5】
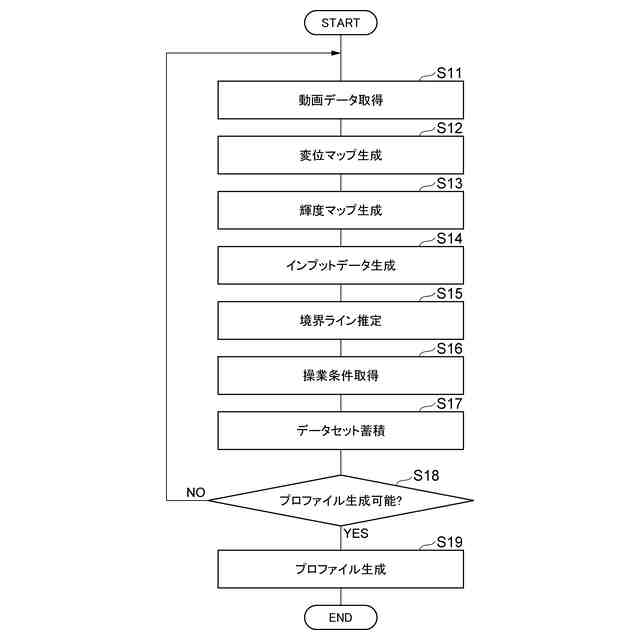
少なくとも前記鋼帯の送り速度を含む操業条件と、前記境界ラインの推定結果とをそれぞれが含む複数のレコードに基づいて、前記基準プロファイルを生成するプロファイル生成部を更に備え、
前記基準設定部は、生成された前記基準プロファイルと、新たに取得された前記操業条件と、に基づいて前記基準ラインを設定する、
請求項4記載のドロス位置推定装置。
【請求項6】
推定された前記境界ラインに基づいて、
前記境界ラインを含む前記液面を上方から見たマップ画像を描画する描画部を更に備える、
請求項1~5のいずれか一項記載のドロス位置推定装置。
【請求項7】
前記動画データに基づいて、前記複数のエリアごとの輝度を表す輝度マップを生成する輝度マップ生成部を更に備え、
前記推定部は、前記輝度マップを更に含む前記インプットデータと、前記境界ラインとの関係を表すように機械学習により生成された前記推定モデルと、前記輝度マップを更に含む新たなインプットデータとに基づいて、
前記境界ラインを推定する、
請求項1~5のいずれか一項記載のドロス位置推定装置。
【請求項8】
前記動画データに基づいて、前記メッキポットまわりの作業用のツールの位置を認識するツール認識部と、
前記基準ラインと、推定された前記境界ラインとの差のうち、前記ツールの位置を含む所定範囲に生じた差を除外するように差分データを補正する補正部と、
を更に備え、
前記判定部は、補正された差分データに基づいて、前記ドロスの除去の要否を判定する、
請求項2~5のいずれか一項記載のドロス位置推定装置。
【請求項9】
前記判定部は、前記境界ラインの変化速度に更に基づいて、前記ドロスの除去の要否を判定する、
請求項2~5のいずれか一項記載のドロス位置推定装置。
【請求項10】
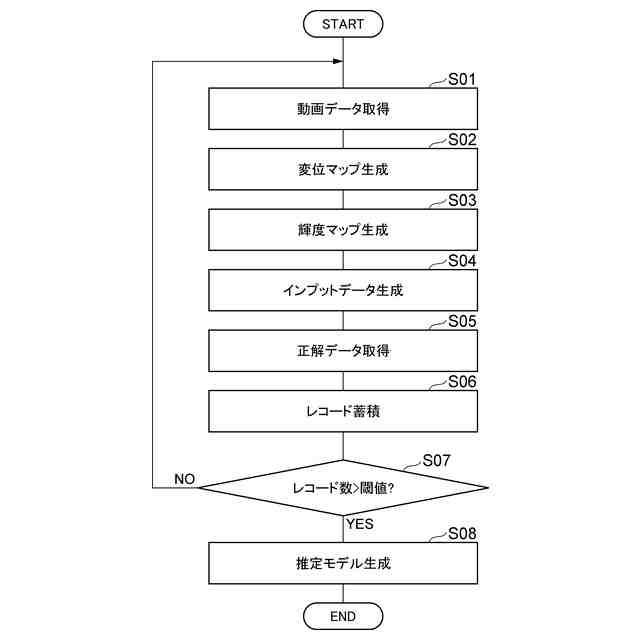
前記動画データに基づき視認された前記境界ラインを示す正解データを取得する正解データ取得部と、
前記インプットデータと、前記正解データとを対応付けた学習用レコードをデータベースに蓄積する蓄積部と、
前記データベースに蓄積された複数の学習用レコードに基づく機械学習により、前記推定モデルを生成するモデル生成部と、
を更に備える、
請求項1~5のいずれか一項記載のドロス位置推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ドロス位置推定装置、及びドロス位置推定方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、溶融金属の表面から放射される赤外線を検出する赤外線検出装置と、赤外線検出装置を制御して、溶融金属の表面から放射される赤外線の赤外線強度を所定期間に亘って測定するように構成される測定部と、測定された赤外線強度の、溶融金属の表面の波立ちに起因した時間変化に基づいて、ドロスを検知するように構成される検知部と、を備える、ドロス検知システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-14632号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、ドロスの除去の要否を高い信頼性で検知するのに有効な装置を提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るドロス位置推定装置は、メッキポットに収容された液状のメッキ材に、鋼帯を連続で通す連続メッキ装置において、メッキポット内のメッキ材の液面を撮影するカメラと、カメラにより時系列で撮影された複数の画像を含む動画データに基づいて、カメラの視野における複数のエリアごとに、エリア内の撮影対象の変位ベクトルを表す変位マップを生成する変位マップ生成部と、変位マップを含むインプットデータと、液面のうちドロスに覆われた領域とドロスに覆われていない領域との境界ラインと、の関係を表すように機械学習により生成された推定モデルと、新たに生成された変位マップを含むインプットデータとに基づいて、境界ラインを推定する推定部と、を備える。
【0006】
特許文献1においては、特定の位置にドロスがあるか否かを検出することはできる。しかしながら、特定の位置にドロスがなかったとしても、他の位置において、ドロスが鋼帯に接近してしまっている可能性もあるので、特定の位置における検出のみでは、ドロスの除去の要否を高い信頼性で検知することはできない。広範囲にドロスの位置を検出するには、広範囲を撮影した画像に基づくのが有効であるが、ドロスに覆われた領域と、ドロスに覆われていない領域との輝度差が小さい場合等には、境界ラインを高い信頼性で検出することができない。本開示に係るドロス位置推定装置によれば、カメラの視野における複数のエリアごとに、エリア内の撮影対象の変位ベクトルを表す変位マップが生成され、変位マップを含むインプットデータと、境界ラインとの関係を表すように機械学習により生成された推定モデルと、新たに生成された変位マップを含む新たなインプットデータとに基づいて、境界ラインが推定される。ドロスに覆われた領域と、ドロスに覆われていない領域との輝度差が小さい場合であっても、変位ベクトルの差は明確に現れる。従って、変位マップをインプットデータに含めて生成された推定モデルと、新たに生成された変位マップを含めた新たなインプットデータとに基づくことで、広い範囲における境界ラインを高い信頼性で推定することができる。従って、このドロス位置推定装置は、ドロスの除去の要否を高い信頼性で検知するのに有効である。
【0007】
予め定められた基準ラインと、推定された境界ラインとの差を表す差分データに基づいて、ドロスの除去の要否を判定する判定部を更に備えてもよい。高い信頼性で推定された境界ラインと、基準ラインとの差に基づくことで、ドロスの除去の要否を高い信頼性で判定することができる。
【0008】
境界ラインの推定結果に基づいて、基準ラインを設定する基準設定部を更に備え、判定部は、設定された基準ラインと、推定された境界ラインとの差を表す差分データに基づいて、ドロスの除去の要否を判定してもよい。境界ラインの推定結果を基準ラインの設定にも活用し、使い勝手を向上させることができる。
【0009】
少なくとも鋼帯の送り速度を含む操業条件と、基準ラインとの関係を表すように予め定められた基準プロファイルと、新たに取得された操業条件とに基づいて基準ラインを設定する基準設定部を更に備え、判定部は、設定された基準ラインと、推定された境界ラインとの差に基づいて、ドロスの除去の要否を判定してもよい。境界ラインは、操業条件によっても変化し得る。これに対応し、操業条件に応じて基準ラインを設定することで、ドロスの除去の要否をより高い信頼性で判定することができる。
【0010】
少なくとも鋼帯の送り速度を含む操業条件と、境界ラインの推定結果とをそれぞれが含む複数のレコードに基づいて、基準プロファイルを生成するプロファイル生成部を更に備え、基準設定部は、生成された基準プロファイルと、新たに取得された操業条件と、に基づいて基準ラインを設定してもよい。境界ラインの推定結果を基準プロファイルの生成にも活用し、使い勝手を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本製鉄株式会社
鋼材
12日前
日本製鉄株式会社
鋼材
18日前
日本製鉄株式会社
鋼材
1か月前
日本製鉄株式会社
部品
4日前
日本製鉄株式会社
鋼材
12日前
日本製鉄株式会社
溶接継手
3日前
日本製鉄株式会社
構造部材
25日前
日本製鉄株式会社
転炉精錬方法
23日前
日本製鉄株式会社
柱梁接合構造
13日前
日本製鉄株式会社
鋼の製造方法
12日前
日本製鉄株式会社
捻回試験装置
4日前
日本製鉄株式会社
熱間圧延鋼材
1か月前
日本製鉄株式会社
電車線柱構造
1か月前
日本製鉄株式会社
表面処理鋼材
4日前
日本製鉄株式会社
溶鉄の精錬方法
1か月前
日本製鉄株式会社
多角形筒形構造
12日前
日本製鉄株式会社
コークスの製造方法
23日前
日本製鉄株式会社
コイルばねの製造方法
13日前
日本製鉄株式会社
含炭塊成鉱の製造方法
1か月前
日本製鉄株式会社
転がり疲労強度試験装置
25日前
日本製鉄株式会社
ラインパイプ用電縫鋼管
13日前
日本製鉄株式会社
転がり疲労強度試験装置
25日前
日本製鉄株式会社
転がり疲労強度試験装置
25日前
日本製鉄株式会社
転がり疲労強度試験装置
25日前
日本製鉄株式会社
素形材及びその製造方法
4日前
日本製鉄株式会社
転がり疲労強度試験装置
25日前
日本製鉄株式会社
高力ボルト摩擦接合構造
12日前
日本製鉄株式会社
ハット形鋼矢板の製造方法
18日前
日本製鉄株式会社
試験システム及び試験方法
17日前
日本製鉄株式会社
Al脱酸鋼の連続鋳造方法
5日前
日本製鉄株式会社
鉄鉱石の還元気化脱リン方法
18日前
日本製鉄株式会社
鉄鉱石の還元気化脱リン方法
18日前
日本製鉄株式会社
管状体及び管状体の製造方法
1か月前
日本製鉄株式会社
転炉の吹錬終了温度設定方法
13日前
日本製鉄株式会社
応力分布測定方法及びプログラム
18日前
日本製鉄株式会社
溶接継手の応力拡大係数推定方法
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ