TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041262
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148453
出願日
2023-09-13
発明の名称
飛行システム、制御装置および飛行体の制御方法
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
主分類
B64U
50/18 20230101AFI20250318BHJP(航空機;飛行;宇宙工学)
要約
【課題】飛行体により検出すべき情報を適切に検出することが可能な飛行システム、制御装置および飛行体の制御方法を提供する。
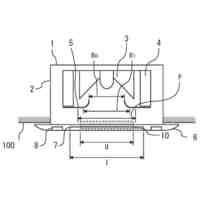
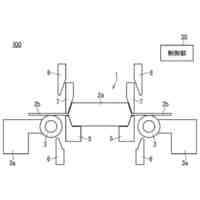
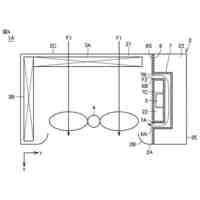
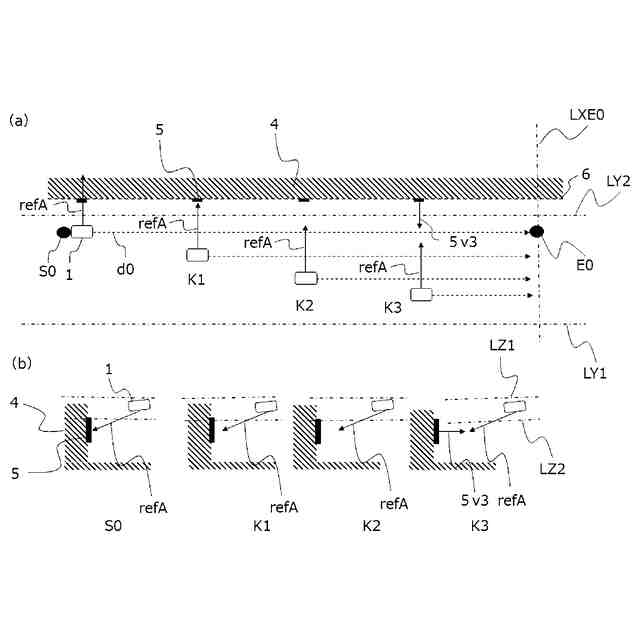
【解決手段】空中を飛行する飛行体1と、飛行位置と姿勢を含む飛行体1の飛行情報を取得する、飛行情報取得部と、飛行情報取得部により取得された飛行情報にもとづいて、飛行体1を制御する、飛行制御部と、飛行体1に備えられ、飛行体1の飛行中に検出対象物4から対象物情報を検出する検出部と、を備える。検出対象物4が複数の検出対象領域5を含み、検出部が、基準軸refAを有し、基準軸refAに沿って検出対象領域5から対象物情報を検出する。飛行制御部は、検出部が、複数の検出対象領域5から対象物情報を検出する時に、複数の検出対象領域5の各々に対して予め定められた検出方向と、検出部の基準軸refAとがなす角度が、予め定められた第1の範囲内となるように、飛行体1を制御する。
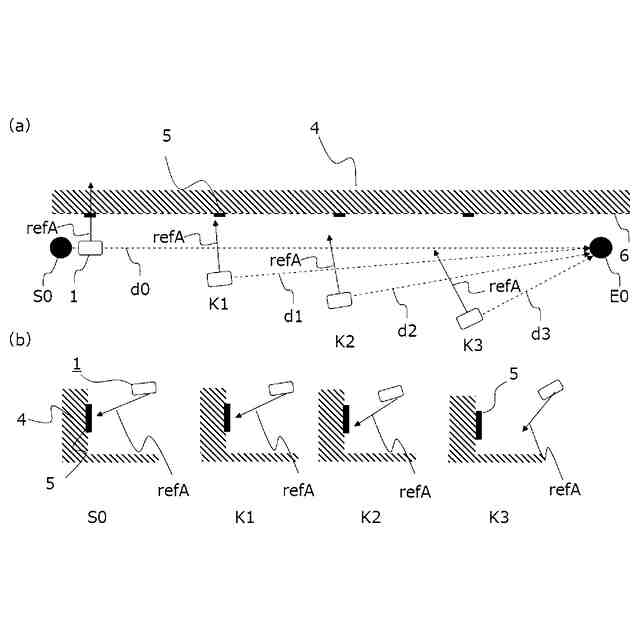
【選択図】図5
特許請求の範囲
【請求項1】
空中を飛行する飛行体と、
飛行位置を含む前記飛行体の飛行情報を取得する飛行情報取得部と、
前記飛行情報取得部により取得された前記飛行情報に基づいて、前記飛行体を制御する飛行制御部と、
前記飛行体に設けられ、前記飛行体の飛行中に検出対象物から対象物情報を検出する検出部と、
を備え、
前記検出対象物は、複数の検出対象領域を含み、
前記検出部は、基準軸を有し、前記基準軸に沿って前記複数の検出対象領域から対象物情報を検出し、
前記飛行制御部は、前記検出部が、前記複数の検出対象領域の各々から前記対象物情報を検出する時に、前記複数の検出対象領域の各々に対して予め定められた検出方向と、前記検出部の前記基準軸とがなす角度が、予め定められた第1の範囲内となるように、前記飛行体を制御することを特徴とする飛行システム。
続きを表示(約 1,600 文字)
【請求項2】
前記飛行制御部は、前記飛行体の目的位置を取得し、前記角度が前記第1の範囲内となるように、前記目的位置を補正し、補正した目的位置に向かうように前記飛行体を制御する、
ことを特徴とする、請求項1に記載の飛行システム。
【請求項3】
前記飛行制御部は、前記複数の検出対象領域の位置および前記検出方向、ならびに前記検出部による前記複数の検出対象領域の検出の順序に基づいて、前記飛行体の飛行経路を決定し、決定した飛行経路に沿って飛行するように前記飛行体を制御する、
ことを特徴とする、請求項1に記載の飛行システム。
【請求項4】
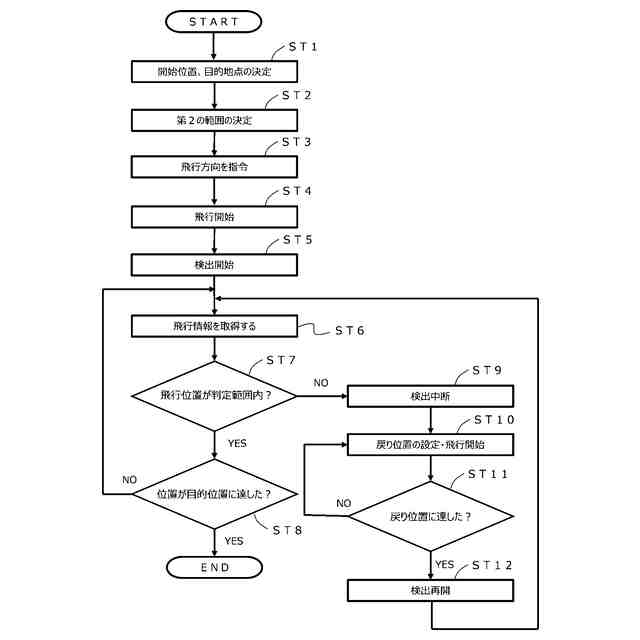
前記飛行体の飛行位置の適正範囲が第2の範囲として定められ、
前記飛行システムは、
前記飛行体の飛行位置が前記第2の範囲内にあるか否かを判定する第1の判定部をさらに備え、
前記第1の判定部により前記飛行体の飛行位置が前記第2の範囲内にないと判定された場合、前記飛行制御部は、前記飛行体の飛行位置が前記第2の範囲内になるように、前記飛行体を制御する、
ことを特徴とする、請求項1から3のいずれか1項に記載の飛行システム。
【請求項5】
前記検出部は、前記検出対象領域を撮像することにより前記検出対象領域の画像データを前記対象物情報として検出する撮像部を含み、
前記撮像部は、予め定められた画角および予め定められた焦点深度を有し、
前記第2の範囲は、前記撮像部の画角および前記焦点深度に基づいて定められる、
ことを特徴とする、請求項4に記載の飛行システム。
【請求項6】
前記複数の検出対象領域の前記検出方向は、互いに等しい、
ことを特徴とする、請求項1から請求項3のいずれか1項に記載の飛行システム。
【請求項7】
前記複数の検出対象領域のうち少なくとも2つの検出対象領域の前記検出方向は、互いに異なる、
ことを特徴とする、請求項1から請求項3のいずれか1項に記載の飛行システム。
【請求項8】
前記飛行制御部は、前記複数の検出対象領域のうち少なくとも1つの検出対象領域を含むように設定された曲面状の検出面に沿って、前記飛行体が曲線状に飛行するように、前記飛行体を制御する、
ことを特徴とする、請求項7に記載の飛行システム。
【請求項9】
前記飛行制御部は、前記複数の検出対象領域の位置に基づいて、前記飛行体が経由すべき複数の経由位置を設定し、
前記複数の経由位置は、第1の経由位置と、前記第1の経由位置の次に前記飛行体が経由すべき第2の経由位置とを含み、
前記複数の検出対象領域は、前記飛行体が前記第1の経由位置から前記第2の経由位置まで飛行する期間に前記検出部により検出すべき経由位置間対象領域を含み、
前記飛行制御部は、前記第1の経由位置から前記第2の経由位置まで前記飛行体が飛行する期間に、前記飛行体が直線的にかつ一定の姿勢で飛行しつつ、前記検出部の前記基準軸と前記経由位置間対象領域の前記検出方向とがなす角度が、前記第1の範囲内になるように、前記飛行体を制御する、
ことを特徴とする、請求項7に記載の飛行システム。
【請求項10】
前記飛行制御部は、前記飛行体の前記経由位置を取得し、前記経由位置の適正範囲が第3の範囲として定められ、
前記飛行システムは、
前記補正後の経由位置が前記第3の範囲内にあるか否かを判定する第3の判定部をさらに備え、
前記第3の判定部により前記補正後の経由位置が前記第3の範囲内にないと判定された場合、前記飛行制御部は、前記飛行体の飛行位置が前記第2の範囲内、かつ補正後の経由位置が前記第3の範囲内になるように、前記飛行体を制御する、
ことを特徴とする、請求項9に記載の飛行システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、飛行体を制御する飛行システム、制御装置および飛行体の制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、トンネル、橋梁などのインフラ構造物の点検に、無人飛行体の遠隔操作または自律飛行が活用されている。無人飛行体としてのドローンを自律飛行させる場合には、ドローンに開始位置、経由位置および目的位置(終点)などを表す経路情報を与えて、ドローンがGlоbal Pоsitiоning System(GPS)などの自己位置を推定する機能などを用いて飛行する。
【0003】
ドローンが自律飛行している際に、ドローンに搭載したセンサーにより検出された画像またはセンサー情報を、リアルタイムにオペレータが確認しながら調査を行う場合もあるが、あらかじめドローンの飛行経路を設定して、ドローンを自律飛行させたあとに、センサーにより検出された画像またはセンサー情報をオペレータがオフラインで確認する場合もある。オフラインでセンサーにより検出された画像やセンサー情報を用いる場合、ドローンの自律飛行には、予め設定された経路に沿った飛行が求められる。
【0004】
特許文献1に記載された無人飛行体の飛行経路制御システムは、3次元空間における空間飛行経路を生成し、2次元平面地図に投影した、無人飛行体の飛行位置が、生成された空間飛行経路を2次元平面地図に投影した2次元経路に沿うように、無人飛行体を制御している。
【先行技術文献】
【特許文献】
【0005】
特開2019-120986号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
実際の飛行では風などの外乱や自己位置推定の誤差などで飛行体の飛行位置が飛行経路から外れる。特許文献1の飛行経路制御システムでは、無人飛行体の飛行位置が飛行経路から外れた場合、制御システムは、飛行体の飛行方向および姿勢を補正しながら飛行経路に沿うように飛行体を飛行させる。しかしながら、飛行体の飛行方向または姿勢が変化すると、測定対象と飛行体との位置関係が変化し、本来の検出すべき情報が検出できないことがある。
【0007】
本開示は、上記のような問題点を解決するためになされたものであり、飛行体により検出すべき情報を適切に検出することが可能な飛行システム、制御装置および飛行体の制御方法を提供することである。
【課題を解決するための手段】
【0008】
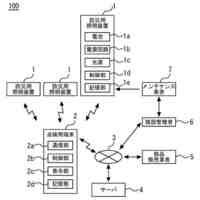
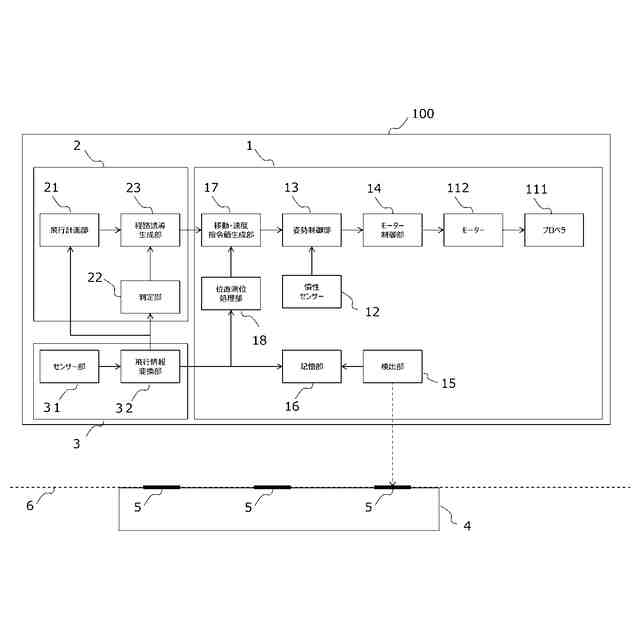
本開示に係る飛行体の飛行システムは、空中を飛行する飛行体と、飛行位置と姿勢を含む飛行体の飛行情報を取得する、飛行情報取得部と、飛行情報取得部により取得された飛行情報に基づいて、飛行体を制御する、飛行制御部と、飛行体に備えられ、飛行体の飛行中に検出対象物から対象物情報を検出する検出部と、を備える。検出対象物が複数の検出対象領域を含み、検出部が、基準軸を有し、基準軸に沿って複数の検出対象領域から対象物情報を検出する。飛行制御部は、検出部が、複数の検出対象領域から対象物情報を検出する時に、複数の検出対象領域の各々に対して予め定められた検出方向と、検出部の基準軸とがなす角度が、予め定められた第1の範囲内となるように、飛行体を制御する。
【発明の効果】
【0009】
本開示によれば、飛行中、複数の検出対象領域の各々に設定された検出方向と、検出部の基準軸とがなす角度が、予め定められた範囲内となる。それにより、検出対象領域に対する検出部の姿勢が一定となり、飛行体により検出すべき情報を適切に検出することが可能となる。
【図面の簡単な説明】
【0010】
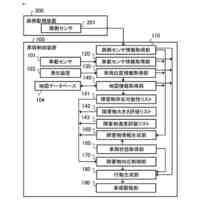
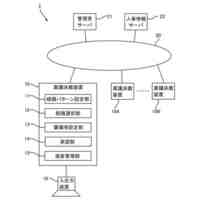
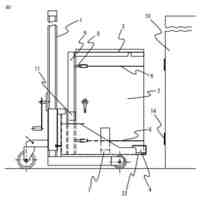
実施の形態1に係る飛行システムの構成を示す図である。
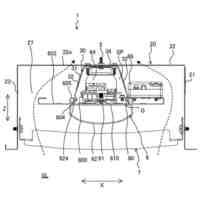
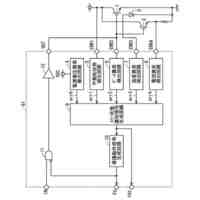
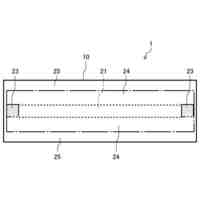
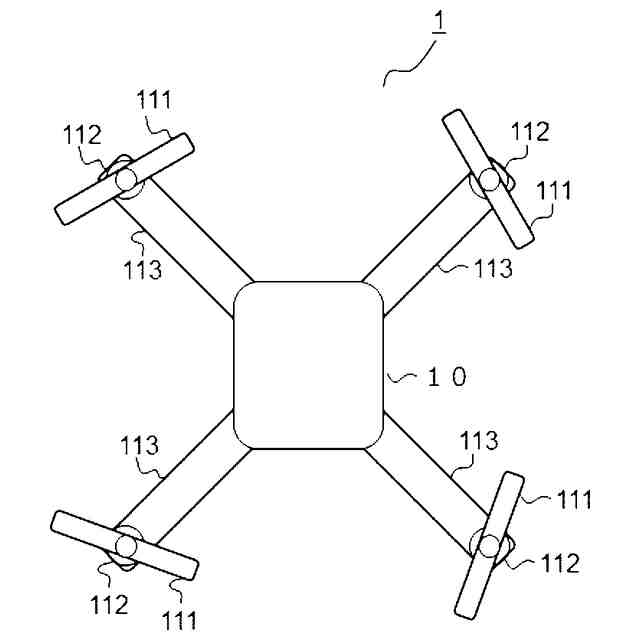
飛行体の平面図である。
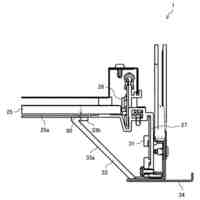
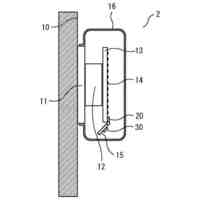
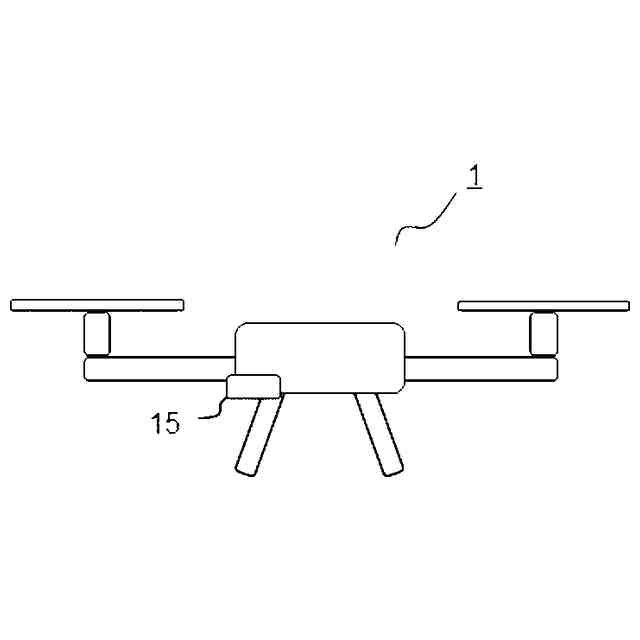
飛行体の側面図である。
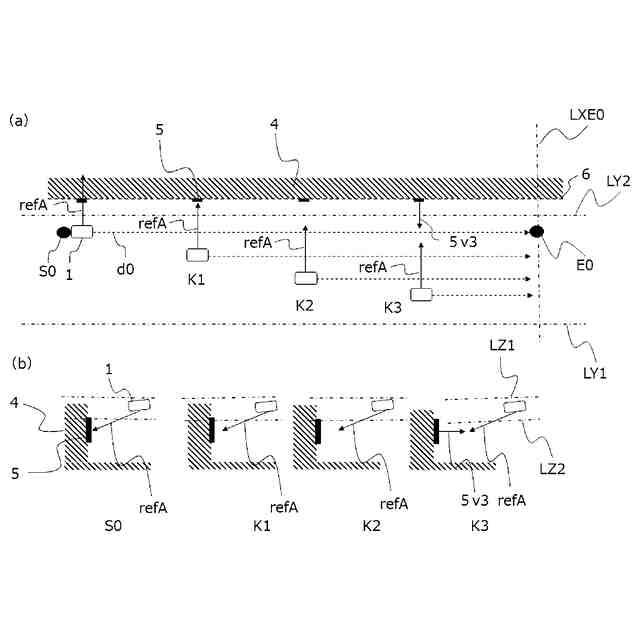
飛行体の従来の制御方法について説明するための図である。
実施の形態1の制御例1に係る飛行体1の制御方法について説明するための図である。
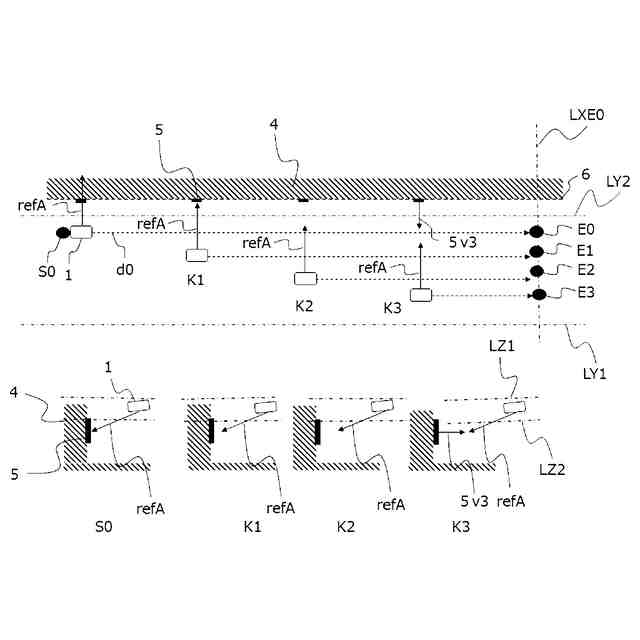
実施の形態1において飛行位置が第2の範囲から外れた場合の動作を示す模式的平面図である。
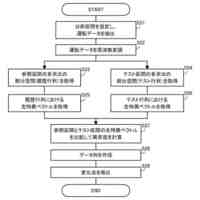
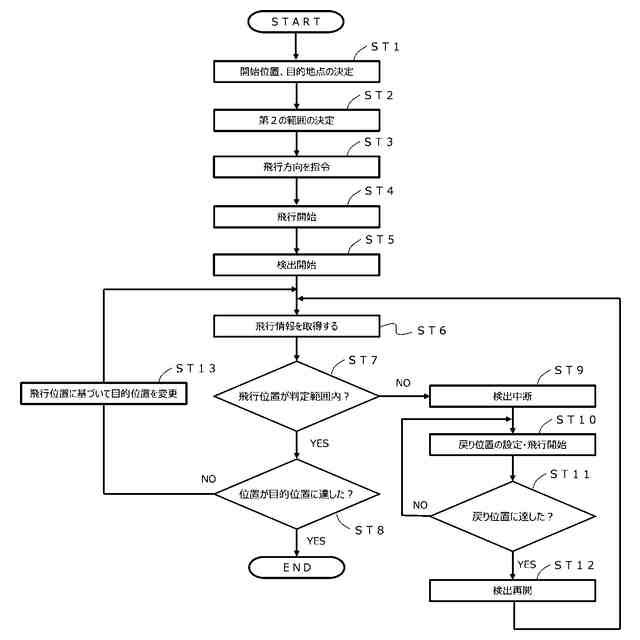
実施の形態1の制御例1に係る動作フローを示すフローチャートである。
実施の形態1の制御例2に係る飛行体の飛行方向と検出部の基準軸を示す図である。
実施の形態1の制御例2に係る動作フローを示すフローチャートである。
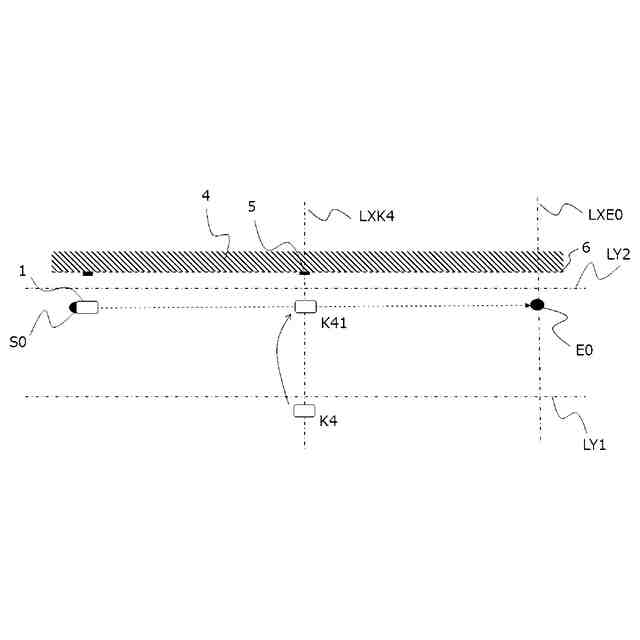
実施の形態2の制御例1について説明するための模式的平面図である。
実施の形態2の制御例1における飛行体1の飛行方向を示す模式的平面図である。
実施の形態2の制御例1に係る動作フローを示すフローチャートである。
実施の形態2の制御例2について説明するための模式的平面図である。
実施の形態2の制御例2に係る動作フローを示すフローチャートである。
実施の形態2の制御例3に係る飛行体の飛行方向を示す模式的平面図である。
飛行体が、第2の範囲の境界面近傍を飛行している時の経由位置を示す模式的平面図である。
実施の形態2の制御例3に係る動作フローを示すフローチャートである。
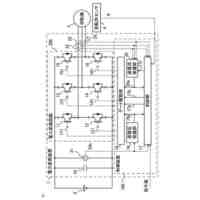
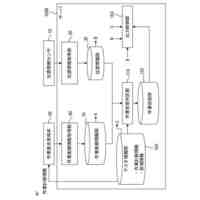
制御部の少なくとも一部の機能がソフトウェアで実現される例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
2日前
三菱電機株式会社
送風機器
25日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
送風装置
24日前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
空気清浄機
25日前
三菱電機株式会社
ラッチ機構
5日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
11日前
三菱電機株式会社
同軸フィルタ
1か月前
三菱電機株式会社
換気システム
24日前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
空調システム
24日前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
超電導電磁石
24日前
三菱電機株式会社
車両システム
23日前
三菱電機株式会社
車両制御装置
13日前
三菱電機株式会社
電力変換装置
11日前
三菱電機株式会社
ゲート駆動装置
1か月前
三菱電機株式会社
半導体製造装置
4日前
三菱電機株式会社
稟議決裁システム
24日前
三菱電機株式会社
冷凍サイクル装置
2日前
三菱電機株式会社
RFリミッタ回路
1か月前
三菱電機株式会社
半導体モジュール
2日前
三菱電機株式会社
半導体素子駆動装置
9日前
三菱電機株式会社
保護リレーシステム
1か月前
三菱電機株式会社
防災灯点検システム
25日前
三菱電機株式会社
作業状態推測システム
24日前
三菱電機株式会社
室外機及び空気調和装置
4日前
三菱電機株式会社
電気機器の扉取替昇降機
1か月前
三菱電機株式会社
照明器具及び照明システム
1か月前
三菱電機株式会社
表示ユニット及び表示装置
1か月前
三菱電機株式会社
トルク締め個所検出システム
2日前
三菱電機株式会社
照明器具および見守りシステム
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ