TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035044
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141805
出願日
2023-08-31
発明の名称
入力装置
出願人
アルプスアルパイン株式会社
代理人
個人
,
個人
主分類
G06F
3/0338 20130101AFI20250306BHJP(計算;計数)
要約
【課題】押圧操作がなされたときに、操作者の意図に反して水平操作の検出値の出力値が不安定化すること抑制できるようにすること。
【解決手段】入力装置は、操作軸を有する起歪体と、操作軸に加えられた水平方向の荷重を検出する荷重センサと、操作軸の上部に設けられた押圧操作可能な操作部材と、操作部材による押圧操作を検出するスイッチ部と、水平方向の荷重の検出値と、スイッチ部による押圧操作の検出値とを、外部へ出力する制御部とを備え、制御部は、スイッチ部によって押圧操作が検出されている間、水平方向の荷重の検出値の出力値を更新しない。
【選択図】図6
特許請求の範囲
【請求項1】
操作軸を有する起歪体と
前記操作軸に加えられた水平方向の荷重を検出する荷重センサと、
前記操作軸の上部に設けられた押圧操作可能な操作部材と、
前記操作部材による前記押圧操作を検出するスイッチ部と、
前記荷重センサによる前記水平方向の荷重の検出値と、前記スイッチ部による前記押圧操作の検出値とを、外部へ出力する制御部と
を備え、
前記制御部は、
前記スイッチ部によって前記押圧操作が検出されている間、前記水平方向の荷重の検出値の出力値を更新しない
ことを特徴とする入力装置。
続きを表示(約 1,700 文字)
【請求項2】
前記制御部は、
前記スイッチ部が前記押圧操作を検出しなくなってから一定期間の間、前記水平方向の荷重の検出値の出力値を更新しない
ことを特徴とする請求項1に記載の入力装置。
【請求項3】
前記制御部は、
前記水平方向の荷重の検出値の出力値の更新を停止した後、前記水平方向の荷重の検出値の出力値の更新を再開してから一定期間は、前記水平方向の荷重の検出値の移動平均値を、前記水平方向の荷重の検出値の出力値として出力し、前記水平方向の荷重の検出値の出力値の更新を再開してから一定期間経過後は、前記水平方向の荷重の検出値を、前記水平方向の荷重の検出値の出力値として出力する
ことを特徴とする請求項1に記載の入力装置。
【請求項4】
前記制御部は、
第1の係数と、第2の係数とを徐々に変更しつつ、前記水平方向の荷重の検出値に前記第1の係数を乗じた値と、前回の前記水平方向の荷重の検出値の出力値に前記第2の係数を乗じた値とによって、前記移動平均値を複数回算出する
ことを特徴とする請求項3に記載の入力装置。
【請求項5】
前記制御部は、
前記スイッチ部によって前記押圧操作が検出されたときに、前記水平方向の荷重の検出値が急変した場合、前記水平方向の荷重の検出値の出力値を更新しない期間に出力する、前記水平方向の荷重の検出値の出力値として、前記急変前の、前記水平方向の荷重の検出値を用いる
ことを特徴とする請求項1に記載の入力装置。
【請求項6】
操作軸を有する起歪体と
前記操作軸に加えられた水平方向の荷重を検出する荷重センサと、
前記操作軸の上部に設けられた押圧操作可能な操作部材と、
前記操作部材による前記押圧操作を検出するスイッチ部と、
前記荷重センサによる前記水平方向の荷重の検出値と、前記スイッチ部による前記押圧操作の検出値とを、外部へ出力する制御部と
を備え、
前記制御部は、
前記水平方向の荷重の検出値が、所定の第1閾値より大きい場合、前記押圧操作を無効化する
ことを特徴とする入力装置。
【請求項7】
前記制御部は、
前記水平方向の荷重の検出値が、前記所定の第1閾値よりも小さい所定の第2閾値より小さい場合、前記水平方向の荷重の検出値を無効化する
ことを特徴とする請求項6に記載の入力装置。
【請求項8】
前記制御部は、
前記水平方向の荷重の検出値が、前記所定の第1閾値よりも小さい所定の第2閾値より小さく、且つ、前記スイッチ部によって前記押圧操作が検出された場合、前記水平方向の荷重の検出値を無効化する
ことを特徴とする請求項6に記載の入力装置。
【請求項9】
操作軸を有する起歪体と
前記操作軸に加えられた水平方向の荷重を検出する荷重センサと、
前記操作軸の上部に設けられた押圧操作可能な操作部材と、
前記操作部材による前記押圧操作を検出するスイッチ部と、
前記荷重センサによる前記水平方向の荷重の検出値と、前記スイッチ部による前記押圧操作の検出値とを、外部へ出力する制御部と
を備え、
前記スイッチ部は、
前記操作部材に加えられた垂直方向の荷重を検出し、
前記制御部は、
前記水平方向の荷重の検出値が、前記垂直方向の荷重の検出値の第1定数倍よりも大きい場合、前記押圧操作を無効化し、
前記第1定数は1より大きい
ことを特徴とする入力装置。
【請求項10】
前記制御部は、
前記水平方向の荷重の検出値が、前記垂直方向の荷重の検出値の第2定数倍よりも小さい場合、前記水平方向の荷重の検出値を無効化し、
前記第2定数は1より小さい
ことを特徴とする請求項9に記載の入力装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、入力装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
下記特許文献1には、操作部材に設けられた棒が押圧センサを作動させることで操作部材の押圧操作を検出し、操作部材の下部側において基板上に設けられた歪センサによって操作部材の傾斜操作を検出し、傾斜操作と押圧操作との同時操作が可能に構成されたスティック式座標入力装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第4667732号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のスティック式座標入力装置は、押圧操作がなされたときに、当該押圧操作によって操作部材に加えられた荷重の一部が、歪みセンサにも加わってしまい、操作者の意図に反して荷重が不安定化する虞がある。
【課題を解決するための手段】
【0005】
一実施形態に係る入力装置は、操作軸を有する起歪体と、操作軸に加えられた水平方向の荷重を検出する荷重センサと、操作軸の上部に設けられた押圧操作可能な操作部材と、操作部材による押圧操作を検出するスイッチ部と、水平方向の荷重の検出値と、スイッチ部による押圧操作の検出値とを、外部へ出力する制御部とを備え、制御部は、スイッチ部によって押圧操作が検出されている間、水平方向の荷重の検出値の出力値を更新しない。
【発明の効果】
【0006】
一実施形態に係る入力装置によれば、押圧操作がなされたときに、操作者の意図に反して水平操作の検出値の出力値が不安定化すること抑制することができる。
【図面の簡単な説明】
【0007】
一実施形態に係る入力装置の外観斜視図
一実施形態に係る入力装置の上方から視た分解斜視図
一実施形態に係る入力装置の下方から視た分解斜視図
一実施形態に係る入力装置の斜視断面図
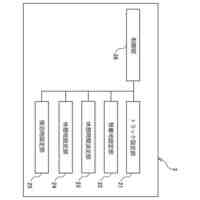
一実施形態に係る入力装置が備える制御系の構成を示すブロック図
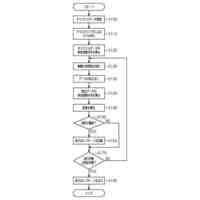
一実施形態に係る入力装置が備える制御装置による、出力制御処理の第1例を示すフローチャート
一実施形態に係る入力装置における水平操作の検出値および出力値の時間変化の一例を示すタイミングチャート
一実施形態に係る入力装置が備える制御装置による、出力制御処理の第2例を示すフローチャート
一実施形態に係る入力装置における水平操作の検出値および出力値の時間変化の一例を示すタイミングチャート
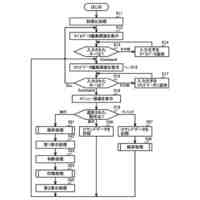
一実施形態に係る入力装置が備える制御装置による、出力制御処理の第3例を示すフローチャート
一実施形態に係る入力装置が備える制御装置による、出力制御処理の第4例を示すフローチャート
一実施形態に係る入力装置が備える制御装置による、出力制御処理の第5例を示すフローチャート
一実施形態に係る入力装置が備える制御装置による、出力制御処理の変形例を示すフローチャート
一実施形態に係る入力装置が備える制御装置による、出力制御処理の第6例を示すフローチャート
一実施形態に係る入力装置が備える制御装置による、出力制御処理の第7例を示すフローチャート
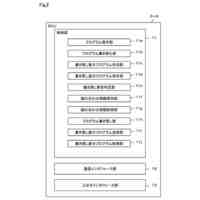
一実施形態に係る入力装置が備える制御装置による、キャリブレーション処理を示すフローチャート
一実施形態の一変形例に係る入力装置の外観斜視図
一実施形態の一変形例に係る入力装置の上方から視た分解斜視図
一実施形態の一変形例に係る入力装置の斜視断面図
【発明を実施するための形態】
【0008】
以下、一実施形態について説明する。なお、以降の説明では、便宜上、図中X軸方向を、前後方向とし、図中Y軸方向を、左右方向とし、図中Z軸方向を、上下方向とする。但し、X軸正方向を前方向とし、Y軸正方向を右方向とし、Z軸正方向を上方向とする。これらは、装置内の相対的な位置関係を示すものであり、装置の設置方向や操作方向を限定するものではなく、装置内の相対的な位置関係が同等なものは、設置方向や操作方向が異なっているものも全て、本発明の権利範囲に含まれるものである。
【0009】
〔一実施形態〕
(入力装置100の構成)
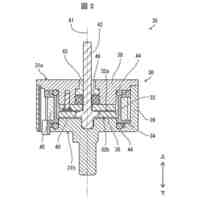
図1は、一実施形態に係る入力装置100の外観斜視図である。図2は、一実施形態に係る入力装置100の上方から視た分解斜視図である。図3は、一実施形態に係る入力装置100の下方から視た分解斜視図である。図4は、一実施形態に係る入力装置100の斜視断面図である。
【0010】
図1~図3に示す入力装置100は、例えば、ゲーム機のコントローラ、ノートパソコン等に用いられ、水平方向(X軸方向およびY軸方向)への水平操作、および、下方(Z軸正方向)への押圧操作が可能な入力装置である。図1~図3に示すように、入力装置100は、基板110、可動接点120、フレキシブル基板130、起歪体140、および操作部材150を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
26日前
個人
在宅介護システム
8日前
個人
人物再現システム
23日前
個人
RFタグ読取装置
8日前
個人
AI飲食最適化プラグイン
16日前
個人
電話管理システム及び管理方法
17日前
有限会社ノア
データ読取装置
24日前
株式会社ザメディア
出席管理システム
1か月前
個人
広告提供システムおよびその方法
26日前
個人
日誌作成支援システム
23日前
株式会社CROSLAN
支援装置
8日前
ミサワホーム株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
工程計画装置
1か月前
個人
ポイント還元付き配送システム
24日前
長屋印刷株式会社
画像形成システム
8日前
ひびきの電子株式会社
認証システム
10日前
株式会社タクテック
商品取出集品システム
1か月前
トヨタ自動車株式会社
作業判定方法
1か月前
オベック実業株式会社
接続構造
23日前
オムロン株式会社
回転装置及びマウス
12日前
トヨタ自動車株式会社
情報処理システム
1か月前
株式会社村田製作所
動き検知装置
1か月前
個人
アルバム作成システム及びアルバム作成方法
10日前
株式会社ドクター中松創研
生成AIの適切使用法
23日前
株式会社実身美
ワーキングシェアリングシステム
24日前
個人
コンテンツ配信システム
1か月前
トヨタ自動車株式会社
情報処理方法
1か月前
株式会社デンソー
電子制御装置
2日前
ブラザー工業株式会社
ラベルプリンタ
1か月前
株式会社エスシーシー
置き配システム
24日前
株式会社半導体エネルギー研究所
情報処理システム
8日前
個人
プラットフォームシステム
1か月前
アスエネ株式会社
温室効果ガス排出量管理方法
9日前
株式会社知財事業研究所
運行計画作成システム
1か月前
アスエネ株式会社
温室効果ガス排出量管理方法
9日前
トヨタ自動車株式会社
方法
9日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ