TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032604
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023137969
出願日
2023-08-28
発明の名称
制御装置、学習装置、制御方法、および学習方法
出願人
国立大学法人大阪大学
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G05B
13/02 20060101AFI20250305BHJP(制御;調整)
要約
【課題】外乱に強い学習器を実現する。
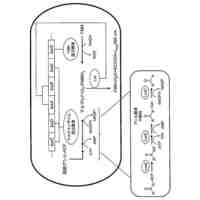
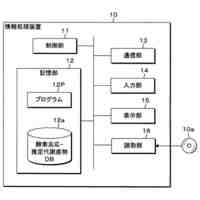
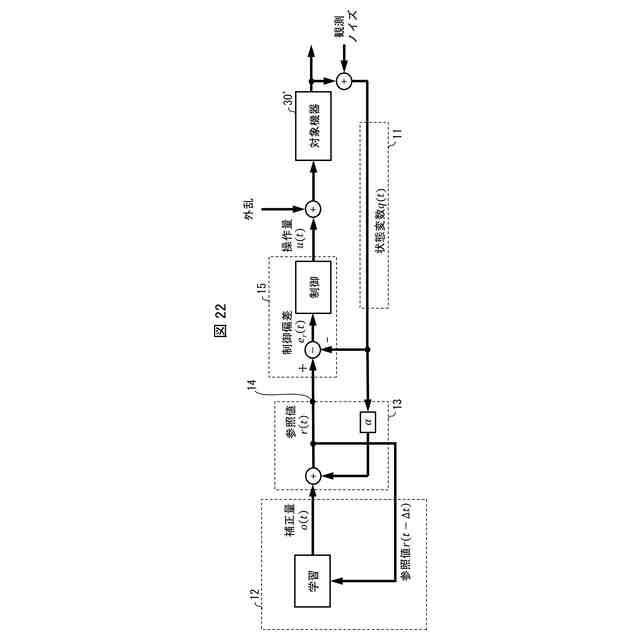
【解決手段】制御装置20は、参照値r(t)が入力され、ロボット30の状態変数q(t)の補正量o(t)を出力する学習済みの学習器12と、ロボットの状態変数に0より大きく1以下の係数を掛けたものと、補正量と、の和を参照値として求める参照値決定部13と、参照値を対象機器の操作量u(t)を決定する制御器15に、出力する出力部14と、を備える。
【選択図】図22
特許請求の範囲
【請求項1】
参照値が入力され、対象機器の状態変数の補正量を出力する学習済みの学習器と、
前記対象機器の状態変数に0より大きく1以下の係数を掛けたものと、前記補正量と、の和を前記参照値として求める参照値決定部と、
前記参照値を前記対象機器の操作量を決定する制御器に、出力する出力部と、
を備える、制御装置。
続きを表示(約 720 文字)
【請求項2】
前記制御器をさらに備え、
前記制御器は、前記参照値と前記状態変数との偏差に基づいて前記対象機器の前記操作量を決定する、請求項1に記載の制御装置。
【請求項3】
前記学習器は、時系列における記憶容量を有する、請求項1に記載の制御装置。
【請求項4】
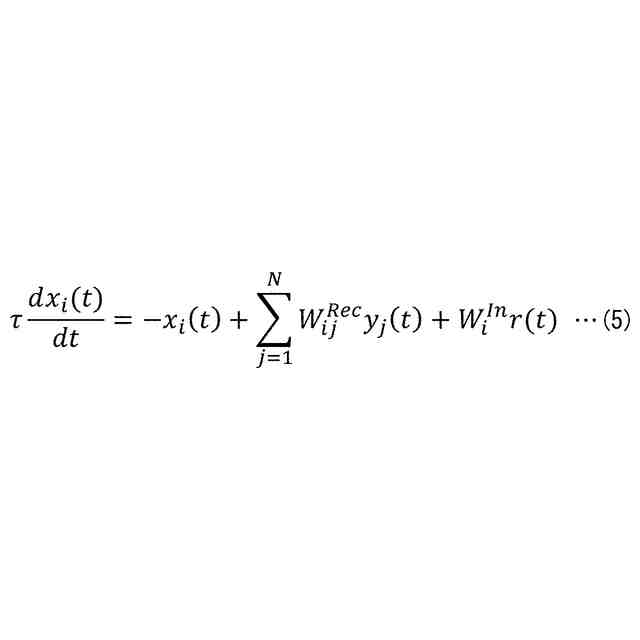
前記学習器は、レザバーである、請求項1に記載の制御装置。
【請求項5】
前記参照値決定部が求める前記参照値は、次の時刻において前記学習器に入力される前記参照値となる、請求項1に記載の制御装置。
【請求項6】
前記操作量には、外乱が加わる、請求項1に記載の制御装置。
【請求項7】
前記状態変数には、ノイズが加わっている、請求項1に記載の制御装置。
【請求項8】
参照値が入力され、前記参照値と対象機器の状態変数に関する目標値との偏差を教師とし、前記対象機器の前記状態変数の補正量を出力する学習器と、
前記対象機器の状態変数に0より大きく1以下の係数を掛けたものと、前記補正量と、の和を前記参照値として求める参照値決定部と、
前記参照値を前記対象機器の操作量を決定する制御器に、出力する出力部と、を備える、学習装置。
【請求項9】
前記制御器をさらに備え、
前記制御器は、前記参照値と前記状態変数との偏差に基づいて前記対象機器の前記操作量を決定する、請求項8に記載の学習装置。
【請求項10】
前記学習器は、時系列における記憶容量を有する、請求項8に記載の学習装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は学習器を用いた制御装置および学習装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
人とロボットが同じ環境で共存し、作業等を行う協働ロボットの開発が進んでいる。人に近い環境でロボットが動作することになるために、予期せぬ外乱がロボットに加わることが考えられる。従来はロボットに対し予期せぬ外乱が加わった場合、ロボットが暴走し、人に危害を加えることを未然に防ぐために、制御的にロボットを即停止させる動作をしていた。
【0003】
しかしながら、ロボットが即停止してしまうと、動作が中断することになり、作業効率を低下させることに繋がる。また、急激な加速度が加わることになるためにロボット自体を破損させる原因になることがある。
【0004】
ここで、非特許文献1には、現在のロボットの状態を考慮して参照軌道を生成することで、予期せぬ外乱に対し緩やかに応答する技術が開示されている。また、非特許文献2には、ガウス混合モデルを用いることによって、学習した軌道と異なる初期状態であっても、所定の軌道を描くことができる技術が開示されている。
【先行技術文献】
【非特許文献】
【0005】
Seto & Sugihara et. al.,"Nonlinear Reference Shaping with Endpoint Position Feedback for Large Acceleration Avoidance in Reaching Movement",Journal of Robotics and Mechatronics Vol.22 No.2, 2010, p.173-178
Khansari-Zadeh & Billard et. al.,"Learning Stable Nonlinear Dynamical Systems With Gaussian Mixture Models",IEEE TRANSACTIONS ON ROBOTICS, VOL. 27, NO. 5, OCTOBER 2011, p.943-957
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、非特許文献1の構成では応答性が悪くなるという問題点がある。非特許文献2の構成ではガウス混合モデルの学習コストが非常に大きいという問題点がある。
【0007】
本発明の一態様は、外乱に強い学習器を実現することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明の一態様に係る制御装置は、参照値が入力され、対象機器の状態変数の補正量を出力する学習済みの学習器と、前記対象機器の状態変数に0より大きく1以下の係数を掛けたものと、前記補正量と、の和を前記参照値として求める参照値決定部と、前記参照値を前記対象機器の操作量を決定する制御器に、出力する出力部と、を備える、構成である。
【0009】
上記の課題を解決するために、本発明の一態様に係る学習装置は、参照値が入力され、前記参照値と対象機器の状態変数に関する目標値との偏差を教師とし、前記対象機器の前記状態変数の補正量を出力する学習器と、前記対象機器の状態変数に0より大きく1以下の係数を掛けたものと、前記補正量と、の和を前記参照値として求める参照値決定部と、前記参照値を前記対象機器の操作量を決定する制御器に、出力する出力部と、を備える、構成である。
【0010】
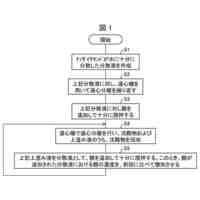
上記の課題を解決するために、本発明の一態様に係る制御方法は、参照値が入力され、対象機器の状態変数の補正量を算出する学習済みの学習器に、前記補正量を出力させる学習適用ステップと、前記対象機器の状態変数に0より大きく1以下の係数を掛けたものと、前記補正量と、の和を前記参照値として求める参照値決定ステップと、前記参照値を前記対象機器の操作量を決定する制御器に、出力する出力ステップと、を含む、方法である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人大阪大学
栄養パルス
5か月前
国立大学法人大阪大学
細胞シート
2か月前
国立大学法人大阪大学
シリコン粒子
6か月前
国立大学法人大阪大学
眼瞼痙攣緩和具
1か月前
国立大学法人大阪大学
ロボットハンド
6日前
国立大学法人大阪大学
内視鏡システム
3か月前
国立大学法人大阪大学
原子力発電装置
3か月前
国立大学法人大阪大学
発光タンパク質
4か月前
国立大学法人大阪大学
漏洩情報抑制回路
1か月前
国立大学法人大阪大学
オルガノイド組成物
7か月前
国立大学法人大阪大学
認知機能評価システム
7か月前
国立大学法人大阪大学
気体分析装置、気体分析方法
6か月前
トヨタ自動車株式会社
電池
2か月前
国立大学法人大阪大学
眼科装置及び被検眼の検査方法
6か月前
国立大学法人大阪大学
電気泳動装置および電気泳動法
14日前
国立大学法人大阪大学
眼科検査装置及び眼科検査方法
6か月前
国立大学法人大阪大学
眼科検査装置及び眼科検査方法
6か月前
国立大学法人大阪大学
細胞抽出装置および細胞抽出方法
6か月前
国立大学法人大阪大学
コネクタ取付具およびコネクタ部材
4か月前
株式会社島津製作所
試料分析方法
6か月前
大和ハウス工業株式会社
反応装置
3か月前
国立大学法人大阪大学
無機構造物及び無機構造物の製造方法
5か月前
国立大学法人大阪大学
化合物の製造方法、及び金属多核錯体
5日前
国立大学法人大阪大学
タンパク質間相互作用を可視化する方法
4日前
株式会社丸島アクアシステム
溶接方法
5か月前
国立大学法人大阪大学
光発電システムの出力電力特性の最適化
4か月前
日本電信電話株式会社
量子鍵配送装置
4か月前
国立大学法人大阪大学
CDCP1抗体又はその抗原結合性断片
6か月前
国立大学法人大阪大学
カルシウム結晶類の結晶形態の分析方法
6か月前
株式会社神戸製鋼所
ねじり疲労評価方法
3か月前
国立大学法人大阪大学
ナノダイヤモンドの製造方法および製造装置
2か月前
株式会社トクヤマ
ケトン誘導体の製造方法
1か月前
株式会社ジャパンディスプレイ
液晶光学素子
3か月前
国立大学法人大阪大学
情報処理方法、情報処理装置、及びプログラム
5か月前
日本電信電話株式会社
ロボットVRシステム
5か月前
日本電信電話株式会社
ロボットVRシステム
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ