TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062708
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023171907
出願日
2023-10-03
発明の名称
ロボットVRシステム
出願人
日本電信電話株式会社
,
国立大学法人大阪大学
代理人
個人
,
個人
,
個人
主分類
H04N
19/105 20140101AFI20250408BHJP(電気通信技術)
要約
【課題】本開示は、移動可能なカメラで撮像された映像の伝送レートを低減可能にすることを目的とする。
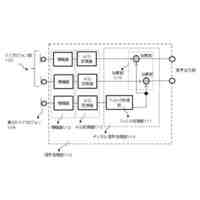
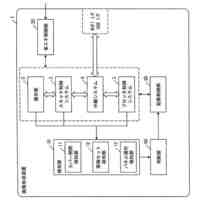
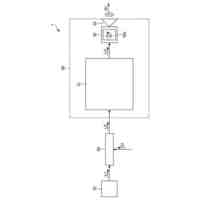
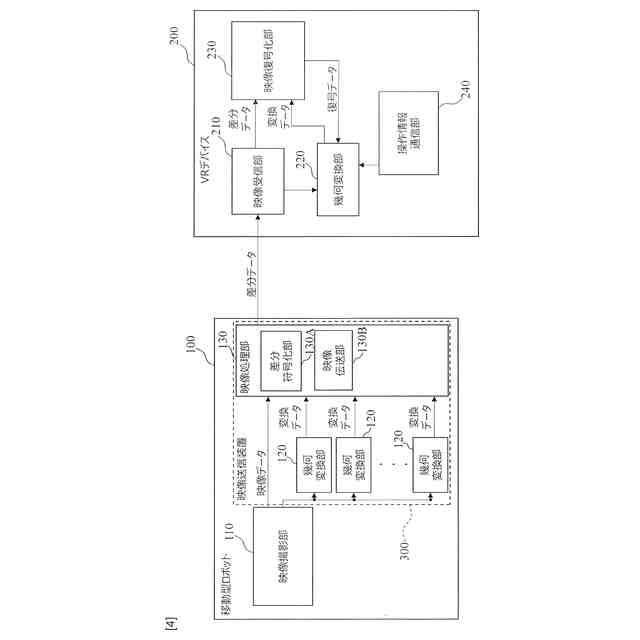
【解決手段】本開示の映像送信装置300は、映像取得部110の移動パターン毎に、映像撮影部110が取得した映像を幾何変換し幾何変換データとして出力する複数の幾何変換部120と、映像撮影部110が取得した映像と、複数の幾何変換部120により移動パターン毎に幾何変換された複数の幾何変換データのそれぞれとの間の差分を比較し、映像撮影部110が取得した映像と、映像取得部110の移動に応じた幾何変換データとの間の差分を符号化する、差分符号化部130Aと、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
映像取得部の移動パターン毎に、前記映像取得部が取得した映像を幾何変換し、幾何変換データとして出力する幾何変換部と、
前記映像取得部が取得した前記映像と、前記幾何変換部により前記移動パターン毎に幾何変換された複数の幾何変換データのそれぞれとの間の差分を比較し、前記映像と、前記映像取得部の移動に応じた幾何変換データとの間の差分を符号化する、差分算出部と、
を備える映像送信装置。
続きを表示(約 920 文字)
【請求項2】
前記幾何変換部は、前記映像取得部の前記移動パターン毎に、前記映像取得部の移動量または移動方向に応じて前記映像を幾何変換する、
請求項1に記載の映像送信装置。
【請求項3】
前記映像取得部は、操作情報を受信する制御対象に設けられ、前記操作情報に応じて移動し、前記制御対象の周囲の映像を取得する、
請求項1に記載の映像送信装置。
【請求項4】
前記差分算出部は、前記映像取得部が取得した第1映像と、前記第1映像が前記映像取得部に取得される前に前記映像取得部に取得された第2映像が前記幾何変換部により幾何変換された複数の幾何変換データのそれぞれとを比較し、前記映像と前記制御対象の移動に応じた幾何変換データとの間の差分を算出する、
請求項1に記載の映像送信装置。
【請求項5】
前記差分算出部による算出の結果を最小差分データとして外部に送信する通信部を、さらに有する、
請求項1に記載の映像送信装置。
【請求項6】
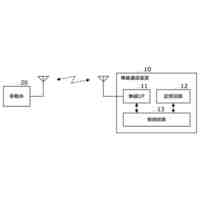
請求項5に記載の映像送信装置と、
前記通信部から送信された前記差分データを受信する受信部、前記受信部が受信した前記差分データに対応するビデオフレームを幾何変換し幾何変換データを出力する第2幾何変換部、及び、前記第2幾何変換部により出力される前記幾何変換データと前記差分データとに基づいて映像を復号化する映像復号化部を備える受信機と、
を備えるロボットVRシステム。
【請求項7】
映像取得部の移動パターン毎に、前記映像取得部が取得した映像を幾何変換し、幾何変換データとして出力するステップと、
前記映像取得部が取得した前記映像と、前記移動パターン毎に幾何変換された複数の幾何変換データのそれぞれとの間の差分を比較し、前記映像と、前記映像取得部の移動に応じた幾何変換データとの間の差分を符号化するステップと、
を含む映像送信方法。
【請求項8】
請求項1から5のいずれかに記載の映像送信装置に備わる各機能部としてコンピュータを実現させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
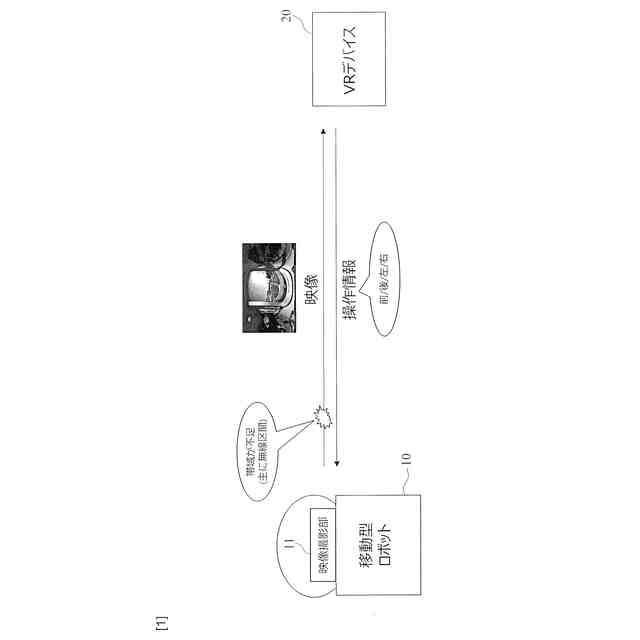
本開示は、移動型ロボットで撮影されたカメラ映像からVR映像を生成するロボットVRシステムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、ロボット等の制御対象が備えるカメラの映像を見ながら制御対象を遠隔操作する際、2次元映像では視野が狭いことからVR映像を見ながら操作したいという要望がある。そこで、制御対象に360度カメラを搭載し操作者にVR映像を伝送するロボットVRシステムが提案されている。
【0003】
このようなロボットVRシステムにおいて、精細なVR映像は通常の映像と比べてビットレートが大きくなる傾向にあるところ、制御対象近傍のネットワークは無線で構成されるため、十分な帯域が得られない可能性がある。そこで、映像を差分符号化して伝送することにより映像のビットレートを低減することが提案されている(非特許文献1から3参照)。
【0004】
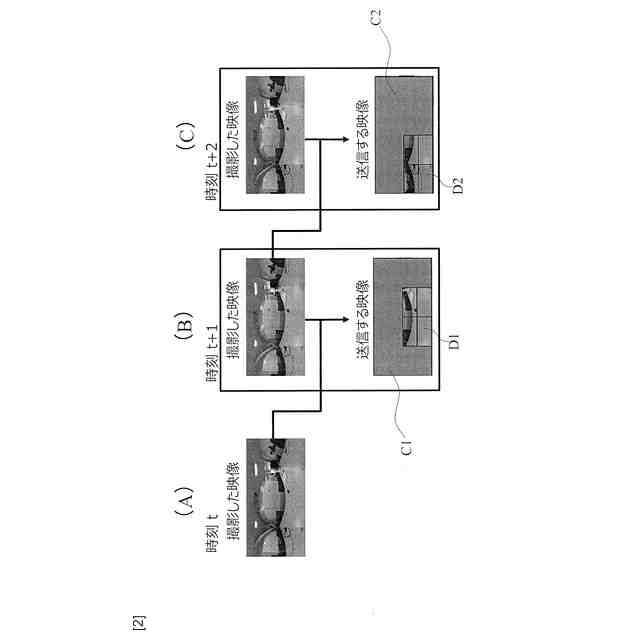
非特許文献1から3では、ビデオフレームを複数に分割した領域ごとに直前フレームとの比較を行い、ビデオフレームのうちの差がある領域のみを送信する。
【先行技術文献】
【非特許文献】
【0005】
Ching-Yeh Chen, Shao-Yi Chien, Yu-Wen Huang, Tung-Chien Chen, Tu-Chih Wang and Liang-Gee Chen, “Analysis and architecture design of variable block-size motion estimation for H.264/AVC,” in IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 53, no. 3, pp. 578-593, March 2006.
Alireza Zare, Alireza Aminlou, Miska M. Hannuksela, and Moncef Gabbouj. 2016. HEVC-compliant Tile-based Streaming of Panoramic Video for Virtual Reality Applications. In Proceedings of the 24th ACM international conference on Multimedia (MM ‘16).
Park, Sang-Hyo, and Je-Won Kang. “Fast affine motion estimation for versatile video coding (VVC) encoding.” IEEE Access 7 (2019): 158075-158084.
【発明の概要】
【発明が解決しようとする課題】
【0006】
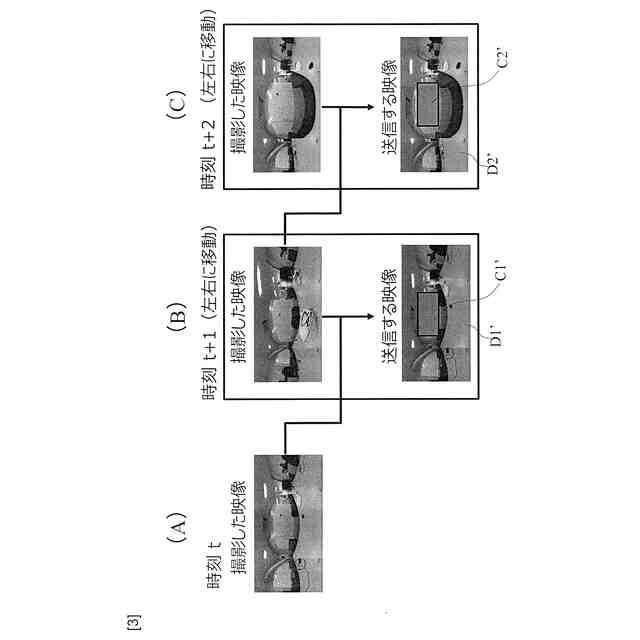
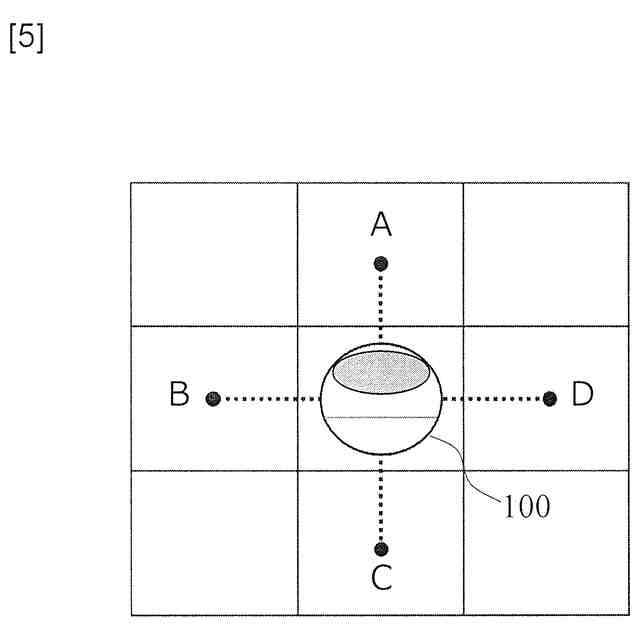
しかしながら、カメラの向きが変化する場合には、同じ物を撮像したとしても、カメラの方向に合わせてビデオフレーム内での物の位置が変化する。このように、移動型ロボットのような移動可能なカメラで撮像された映像では、ビデオフレームにおける同じ領域を比較すると、すべての領域に差が生じ、すべての領域が伝送の対象となってしまうため、ビットレートを低減することができない。
【0007】
そこで、本開示は、移動可能なカメラで撮像された映像の伝送レートを低減可能にすることを目的とする。
【課題を解決するための手段】
【0008】
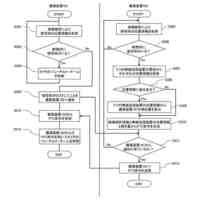
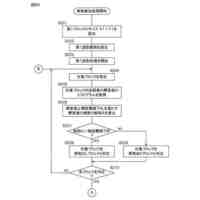
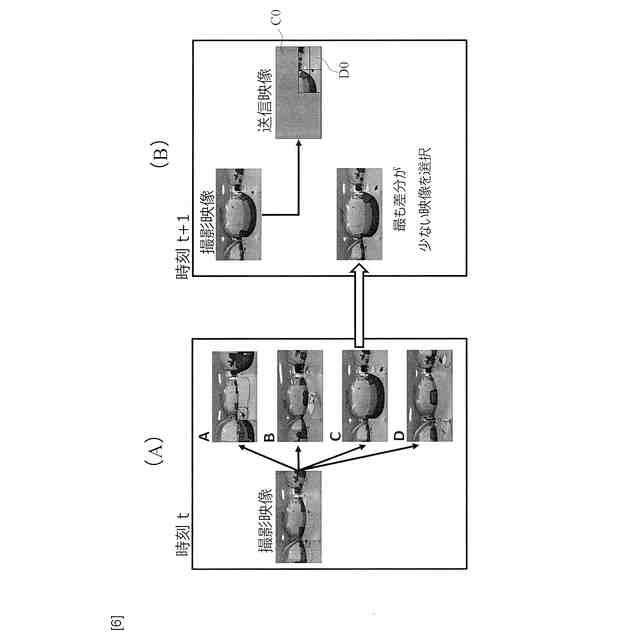
上記課題を解決するために、本開示のロボットVRシステムが備える映像送信装置は、映像取得部の移動パターン毎にビデオフレームを幾何変換し、幾何変換後のビデオフレームと実際に撮影された映像との間の差分を送信する、という方法を採用する。
【0009】
具体的には、本開示の映像送信装置は、
映像取得部の移動パターン毎に、前記映像取得部が取得した映像を幾何変換し、幾何変換データとして出力する幾何変換部と、
前記映像取得部が取得した前記映像と、前記幾何変換部により前記移動パターン毎に幾何変換された複数の幾何変換データのそれぞれとの間の差分を比較し、前記映像と、前記制御対象の移動に応じた幾何変換データとの間の差分を符号化する、差分算出部と、
を備える。
【0010】
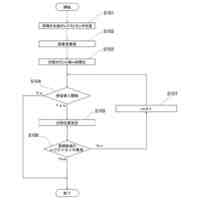
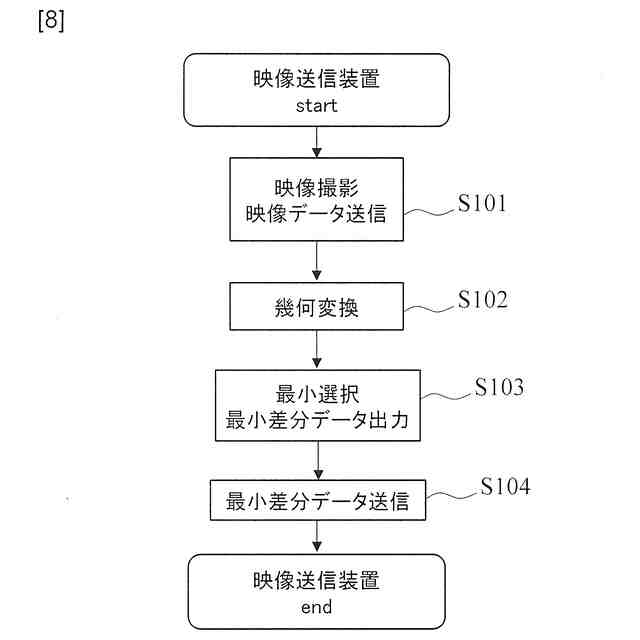
また、本開示の映像送信方法は、
映像取得部の移動パターン毎に、前記映像取得部が取得した映像を幾何変換し、幾何変換データとして出力するステップと、
前記映像取得部が取得した前記映像と、前記移動パターン毎に幾何変換された複数の幾何変換データのそれぞれとの間の差分を比較し、前記映像と、前記映像取得部の移動に応じた幾何変換データとの間の差分を符号化するステップと、
を含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東日本電信電話株式会社
ノイズ源推定装置、ノイズ源推定方法、及びノイズ源推定プログラム
3か月前
個人
イヤーマフ
14日前
個人
監視カメラシステム
23日前
個人
スイッチシステム
8日前
キーコム株式会社
光伝送線路
24日前
WHISMR合同会社
収音装置
1か月前
個人
スキャン式車載用撮像装置
23日前
サクサ株式会社
中継装置
29日前
サクサ株式会社
中継装置
1か月前
キヤノン株式会社
撮像装置
2か月前
アイホン株式会社
電気機器
1か月前
ヤマハ株式会社
放音制御装置
8日前
サクサ株式会社
無線通信装置
29日前
個人
映像表示装置、及びARグラス
9日前
株式会社リコー
画像形成装置
2か月前
キヤノン電子株式会社
画像読取装置
1か月前
株式会社リコー
画像形成装置
3か月前
キヤノン電子株式会社
画像読取装置
8日前
サクサ株式会社
無線システム
28日前
個人
ワイヤレスイヤホン対応耳掛け
1か月前
株式会社リコー
画像形成装置
2か月前
キヤノン電子株式会社
画像読取装置
22日前
株式会社リコー
画像形成装置
16日前
サクサ株式会社
無線通信装置
29日前
日本電気株式会社
海底分岐装置
24日前
個人
発信機及び発信方法
28日前
キヤノン株式会社
撮像システム
1か月前
キヤノン株式会社
画像処理装置
3日前
ブラザー工業株式会社
読取装置
2か月前
株式会社ニコン
撮像装置
3か月前
株式会社NTTドコモ
端末
23日前
株式会社松平商会
携帯機器カバー
2か月前
シャープ株式会社
端末装置
21日前
株式会社小糸製作所
画像照射装置
2か月前
株式会社NTTドコモ
端末
24日前
パテントフレア株式会社
水中電波通信法
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ