TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031551
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2024107509
出願日
2024-07-03
発明の名称
シミュレーション装置、およびプログラム
出願人
ローム株式会社
代理人
弁理士法人 佐野特許事務所
主分類
G06N
20/00 20190101AFI20250228BHJP(計算;計数)
要約
【課題】機械学習による異常検知の効果を効果的にシミュレーションで確認できる。
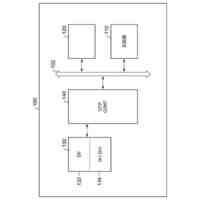
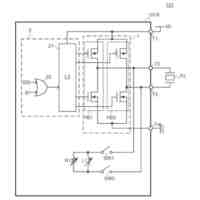
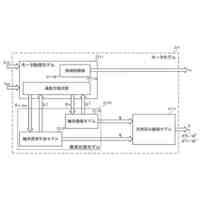
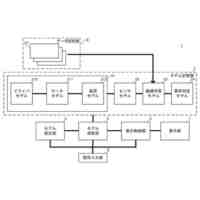
【解決手段】シミュレーション装置(1)は、物理信号波形を生成するように構成される物理システムの物理モデル(211)と、センサモデル(22)と、機械学習モデル(23)と、異常判定モデル(24)と、を記憶されたモデル記憶部(2)と、前記物理モデル、前記センサモデル、前記機械学習モデル、および前記異常判定モデルを用いて演算処理を行うように構成されるモデル演算部(3)と、操作入力部による入力に基づき、前記物理モデル、前記センサモデル、前記機械学習モデル、および前記異常判定モデルのそれぞれに関する設定を行うように構成されるモデル設定部(4)と、を備える。
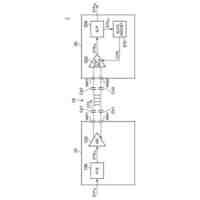
【選択図】図2
特許請求の範囲
【請求項1】
物理信号波形を生成するように構成される物理システムの物理モデルと、
前記物理信号波形データに基づくデータが入力されてセンス信号を出力するように構成されるセンサモデルと、
前記センス信号が入力されて学習および推論を行うように構成される機械学習モデルと、
前記機械学習モデルから出力される誤差データとしての異常度が入力されて異常判定を行うように構成される異常判定モデルと、
を記憶されたモデル記憶部と、
前記物理モデル、前記センサモデル、前記機械学習モデル、および前記異常判定モデルを用いて演算処理を行うように構成されるモデル演算部と、
操作入力部と、
前記操作入力部による入力に基づき、前記物理モデル、前記センサモデル、前記機械学習モデル、および前記異常判定モデルのそれぞれに関する設定を行うように構成されるモデル設定部と、
を備える、シミュレーション装置。
続きを表示(約 1,200 文字)
【請求項2】
前記物理モデルは、モータをモデリングしたモータモデルである、請求項1に記載のシミュレーション装置。
【請求項3】
前記モデル設定部は、前記モータのタイプと前記モータの異常状態の少なくとも一方を選択設定可能である、請求項2に記載のシミュレーション装置。
【請求項4】
前記モデル設定部は、前記モータを構成する機械要素のパラメータと、前記モータの駆動に関する項目の少なくとも一方を設定可能である、請求項2に記載のシミュレーション装置。
【請求項5】
前記モータモデルは、前記モータにおける異常状態をモデリングした異常状態モデルを有し、
前記モデル設定部は、前記モータの劣化進展に応じた前記異常状態モデルにおけるパラメータの変化を設定可能である、請求項2に記載のシミュレーション装置。
【請求項6】
前記異常状態モデルは、前記モータにおける軸受の潤滑不良をモデリングした軸受潤滑不良モデルを含む、請求項5に記載のシミュレーション装置。
【請求項7】
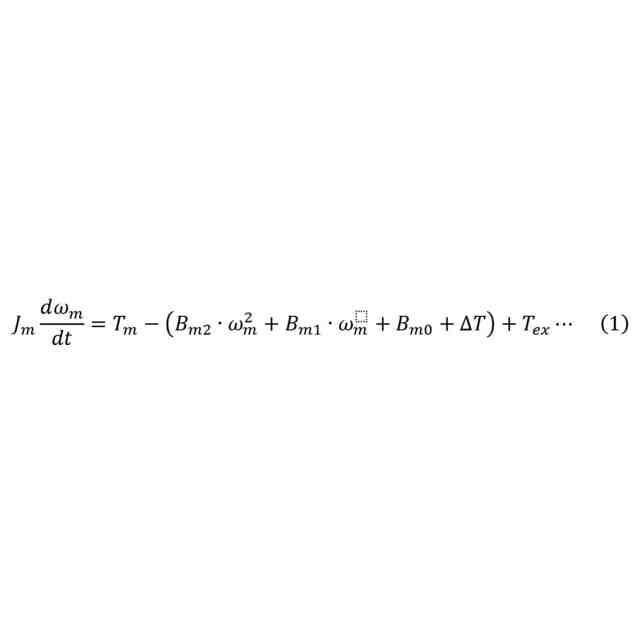
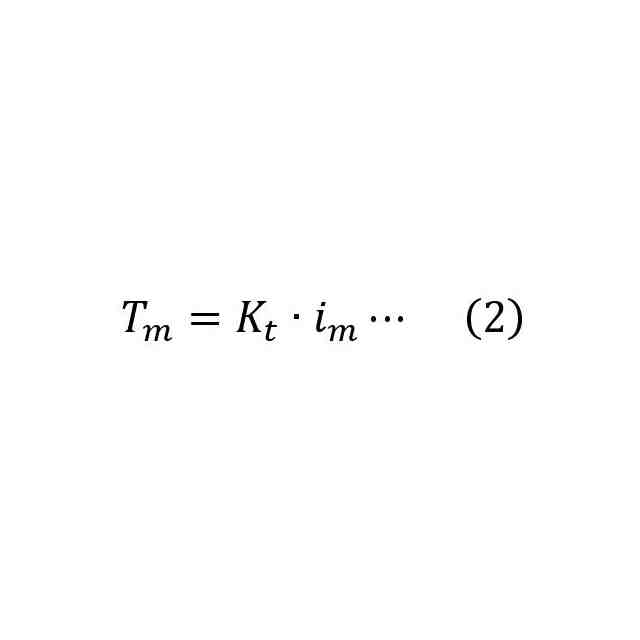
前記軸受潤滑不良モデルは、潤滑不要起因の摩擦トルクを計算するための第1計算式を含み、
前記モデル設定部は、前記第1計算式における機械角角速度に依存する項の定数係数、前記項における機械角の関数、前記項における前記機械角角速度の指数の少なくともいずれかを設定可能である、請求項6に記載のシミュレーション装置。
【請求項8】
前記モータモデルは、前記モータを構成するすべての機械要素を支持系と定義した場合の前記支持系の振動モデルを有し、
前記軸受潤滑不良モデルは、前記摩擦トルクに基づいて潤滑不良起因の垂直抗力を計算するための第2計算式を含み、
前記第2計算式により計算された前記垂直抗力は、前記支持系の振動モデルに入力される、請求項7に記載のシミュレーション装置。
【請求項9】
前記異常状態モデルは、前記モータにおける軸受を構成する機械要素の損傷をモデリングした軸受損傷モデルを含む、請求項5に記載のシミュレーション装置。
【請求項10】
前記モータモデルは、前記モータを構成するすべての機械要素を支持系と定義した場合の前記支持系の振動モデルを有し、
前記軸受損傷モデルは、前記軸受に含まれる転動体の公転角または自転角に基づく角度が衝撃パルスの幅に基づく角度範囲内にある場合に、前記衝撃パルスの高さの損傷起因の垂直抗力が発生するとしてモデリングされており、
前記垂直抗力は、前記支持系の振動モデルに入力され、
前記モデル設定部は、前記衝撃パルスの高さと前記衝撃パルスの幅の少なくとも一方を設定可能である、請求項9に記載のシミュレーション装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、シミュレーション装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、産機分野の工場設備保全に関して、機械システムの状態管理保全(Condition Based Maintenance)に対してAI(人工知能)の適用が進んでいる(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/035279号
【0004】
[概要]
AIを設備の異常検知に導入することを検討する際に、例えばモータおよびセンサなどの実機を用いずにAIによる異常検知の効果を確認できれば有用である。
【0005】
上記状況に鑑み、本開示は、機械学習による異常検知の効果を効果的に確認することができるシミュレーション装置を提供することを目的とする。
【0006】
本開示の一態様に係るシミュレーション装置は、
物理信号波形を生成するように構成される物理システムの物理モデルと、
前記物理信号波形データに基づくデータが入力されてセンス信号を出力するように構成されるセンサモデルと、
前記センス信号が入力されて学習および推論を行うように構成される機械学習モデルと、
前記機械学習モデルから出力される誤差データとしての異常度が入力されて異常判定を行うように構成される異常判定モデルと、
を記憶されたモデル記憶部と、
前記物理モデル、前記センサモデル、前記機械学習モデル、および前記異常判定モデルを用いて演算処理を行うように構成されるモデル演算部と、
操作入力部と、
前記操作入力部による入力に基づき、前記物理モデル、前記センサモデル、前記機械学習モデル、および前記異常判定モデルのそれぞれに関する設定を行うように構成されるモデル設定部と、
を備える構成としている。
【図面の簡単な説明】
【0007】
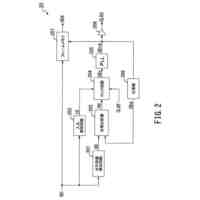
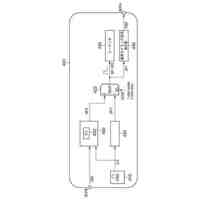
図1は、本開示の例示的な実施形態に係るコンピュータの構成を示す図である
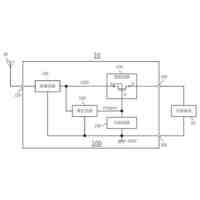
図2は、本開示の例示的な実施形態に係るシミュレーション装置の構成を示す図である。
図3は、モータの概略構成例を示す側面図(左方)と正面図(右方)である。
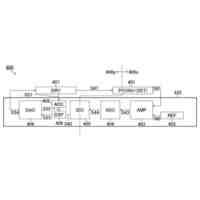
図4は、モータモデルの構成を示す図である。
図5は、運動方程式部と巻線回路部の入出力関係を示す図である。
図6は、逆起電圧定数の回転速度に対するプロットの一例を示す図である。
図7は、モータ端子電流、逆起電圧定数、およびモータトルクの回転速度に対するプロットの一例を示す図である。
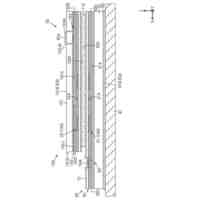
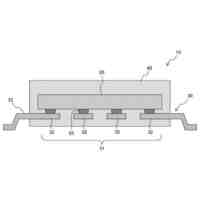
図8は、ブラシ付きDCモータの構成例を示す平面断面模式図である。
図9は、図8に示す構成を周方向に展開した展開図である。
図10は、モータ物理モデルにおけるモデルパラメータを示す図である。
図11は、整流子片間の隙間を示す図である。
図12は、整流子片とブラシとの接触抵抗を説明するための図である。
図13は、巻線の辺の回転移動を示す図である。
図14は、磁束密度分布の一例を示す図である。
図15は、永久磁石とブラシの位置ずれを示す図である。
図16は、巻線の辺の長さを示す図である。
図17は、回転軸からの巻線の辺の距離を示す図である。
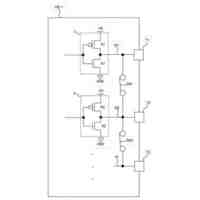
図18は、モータ端子付近のフィルタ構成を示す図である。
図19は、巻線の回転移動を示す模式的な平面図、斜視図、および展開図である。
図20は、巻線の回転移動を示す模式的な展開図である。
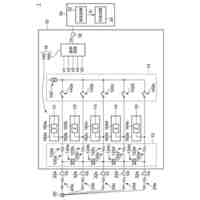
図21は、巻線回路部の全体像を示す図である。
図22は、接触抵抗の計算方法を示す表である。
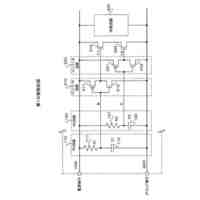
図23は、Simscape(登録商標)/Simulink(登録商標)によりモデリングを行った場合のモータ物理モデルの構成を示す図である。
図24は、巻線回路モデル部の一部構成を示す図である。
図25は、シミュレーション結果の一例を示す図である。
図26は、シミュレーションと実機とを比較した一例を示す図である。
図27は、運動方程式部と軸受潤滑不良モデルとの関係を示す図である。
図28は、運動方程式部と軸受損傷モデルとの関係を示す図である。
図29は、軸受および軸の正面図および側面断面図を示す。
図30は、軸受のパラメータを示す図である。
図31は、転動体の公転角および自転角を説明するための図である。
図32は、支持系の振動モデルの一例を示す図である。
図33は、センサモデルの構成例を示す図である。
図34は、機械学習モデルの構成例を示す図である。
図35は、3層ニューラルネットワークの構成を示す図である。
図36は、モータタイプおよび異常状態の設定画面の一例を示す図である。
図37は、モータ基本設定画面の一例を示す図である。
図38は、支持系設定画面の一例を示す図である。
図39は、第1異常状態設定画面の一例を示す図である。
図40は、第2異常状態設定画面の一例を示す図である。
図41は、時間・劣化設定画面の一例を示す図である。
図42は、センサ設定画面の一例を示す図である。
図43は、AI設定画面の一例を示す図である。
図44は、異常判定設定画面の一例を示す図である。
図45は、シミュレーション結果画面の一例を示す図である。
【0008】
[詳細な説明]
以下、本開示の例示的な実施形態について、図面を参照して説明する。
【0009】
<コンピュータの構成>
図1は、本開示の例示的な実施形態に係るコンピュータ100の構成を示す図である。コンピュータ100は、後述する本開示に係るシミュレーション装置として機能する。コンピュータ100は、例えばPC(パソコン)である。コンピュータ100がPCである場合、デスクトップ型であるかノート型であるかなどは問わない。
【0010】
コンピュータ100は、CPU(Central Processing Unit)100Aと、メモリ100Bと、補助記憶装置100Cと、操作入力部100Dと、表示部100Eと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
基板
6日前
ローム株式会社
保持具
3日前
ローム株式会社
発振回路
2日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置
2日前
ローム株式会社
電力供給回路
6日前
ローム株式会社
画像処理装置
3日前
ローム株式会社
定電圧生成回路
16日前
ローム株式会社
ESD保護回路
2日前
ローム株式会社
半導体集積回路
6日前
ローム株式会社
半導体パッケージ
2日前
ローム株式会社
窒化物半導体装置
2日前
ローム株式会社
窒化物半導体装置
2日前
ローム株式会社
電源制御装置、電源装置
2日前
ローム株式会社
受信装置および通信システム
2日前
ローム株式会社
制御システム、絶縁誤差アンプ
2日前
ローム株式会社
絶縁チップおよび信号伝達装置
2日前
ローム株式会社
電源コントローラ回路および電子機器
2日前
ローム株式会社
半導体装置及び半導体装置の製造方法
2日前
ローム株式会社
駆動装置、超音波センサ、および車両
9日前
ローム株式会社
接続状態判定システムおよび半導体装置
2日前
ローム株式会社
シミュレーション装置、およびプログラム
2日前
ローム株式会社
シミュレーション装置、およびプログラム
2日前
ローム株式会社
ホール素子及びその製造方法並びに半導体装置
2日前
ローム株式会社
窒化物半導体装置および窒化物半導体装置の製造方法
3日前
ローム株式会社
半導体装置
9日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置、半導体装置の試験装置及びマルチチップパッケージ
2日前
ローム株式会社
サーマルプリントヘッド及びサーマルプリントヘッドの製造方法
6日前
個人
プログラム
3日前
個人
情報提示方法
1か月前
個人
アカウントマップ
1か月前
個人
プログラム
1か月前
個人
プログラム
1か月前
株式会社理研
演算装置
10日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ