TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030622
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136093
出願日
2023-08-24
発明の名称
ロボット制御装置及びプラズマ切断方法
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B23K
9/127 20060101AFI20250228BHJP(工作機械;他に分類されない金属加工)
要約
【課題】プラズマ切断ロボットを適切に移動させる教示プログラムにより、タクトタイムを短縮可能なロボット制御装置及びプラズマ切断方法を提供することである。
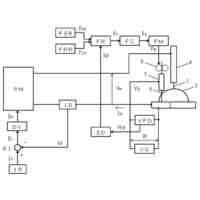
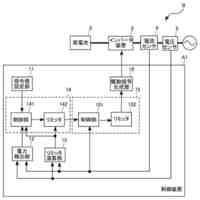
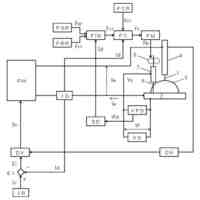
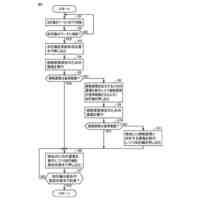
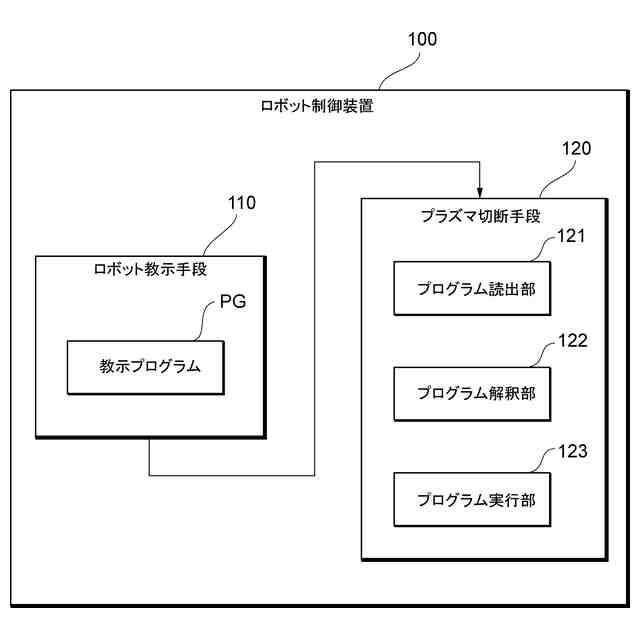
【解決手段】ロボット制御装置100は、プラズマ切断ロボット20を動作させる教示プログラムPGを読み出すプログラム読出部121と、読み出した教示プログラムPGを解釈するプログラム解釈部122と、解釈した教示プログラムPGを実行するプログラム実行部123と、を備え、プログラム解釈部122は、教示プログラムPGにおいてプラズマ切断用のアーク開始命令(AS)を解釈した際には、当該アーク開始命令(AS)後の移動命令(MOVE)に含まれるプラズマ切断ロボット20の位置情報を用いて、当該アーク開始命令(AS)に含まれるプラズマ切断ロボット20におけるトーチ21のアーク開始高さを設定する。
【選択図】図2
特許請求の範囲
【請求項1】
教示によってプログラムされた、プラズマ切断ロボットの動作を制御するティーチングプレイバック式のロボット制御装置であって、
前記プラズマ切断ロボットを動作させる教示プログラムを読み出すプログラム読出部と、
前記読み出した教示プログラムを解釈するプログラム解釈部と、
前記解釈した教示プログラムを実行するプログラム実行部と、を備え、
前記プログラム解釈部は、前記教示プログラムにおいて、プラズマ切断用のアーク開始条件を含むプラズマ切断開始命令を解釈した際には、当該プラズマ切断開始命令後の移動命令に教示されている位置情報を用いて、当該プラズマ切断開始命令におけるアーク開始条件に含まれる前記プラズマ切断ロボットにおけるトーチのアーク開始高さを設定する、
ロボット制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記アーク開始高さは、前記プラズマ切断ロボットにおけるトーチの切断高さ、又は当該切断高さよりも高い点火高さである、
請求項1に記載のロボット制御装置。
【請求項3】
前記切断高さと前記点火高さとが同一となる第1モードと、前記切断高さと前記点火高さとが異なる第2モードと、のいずれかをユーザに選択させる教示装置を含み、
前記教示プログラムは、前記選択された第1モード又は第2モードに基づいて、前記アーク開始高さに前記切断高さ又は前記点火高さが設定されるように生成されている、
請求項2に記載のロボット制御装置。
【請求項4】
前記第1モードは、切断開始位置が切断対象のうち端面である場合に選択され、
前記第2モードは、切断開始位置が切断対象のうち板上である場合に選択される、
請求項3に記載のロボット制御装置。
【請求項5】
前記第1モードと前記第2モードとのいずれかをユーザによって選択可能な態様で表示領域に表示する表示手段を、備える、
請求項3に記載のロボット制御装置。
【請求項6】
前記表示手段は、前記ユーザによって選択された前記第1モード又は前記第2モードに応じて移動する前記トーチの高さ情報を前記表示領域に表示する、
請求項5に記載のロボット制御装置。
【請求項7】
教示によってプログラムされた、プラズマ切断ロボットの動作を制御するティーチングプレイバック式のロボット制御装置が実行するプラズマ切断方法であって、
前記プラズマ切断ロボットを動作させる教示プログラムを読み出すプログラム読出ステップと、
前記読み出した教示プログラムを解釈するプログラム解釈ステップと、
前記解釈した教示プログラムを実行するプログラム実行ステップと、を含み、
前記プログラム解釈ステップでは、前記教示プログラムにおいて、プラズマ切断用のアーク開始条件を含むプラズマ切断開始命令を解釈した際には、当該プラズマ切断開始命令後の移動命令に教示されている位置情報を用いて、当該プラズマ切断開始命令におけるアーク開始条件に含まれる前記プラズマ切断ロボットにおけるトーチのアーク開始高さを設定する、
プラズマ切断方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置及びプラズマ切断方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
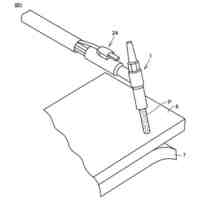
プラズマ切断を行うプラズマ切断ロボットは、一般的に、ティーチングにより事前に設定された切断線に沿ってトーチを移動させ、切断対象となるワークを切断する。プラズマ切断では、トーチをピアス高さに移動させてワークとの間でアークを形成することによってピアス孔を貫通させた後、トーチを切断高さに移動させてワークを切断する。この時、トーチをピアス高さ及び切断高さに適切に移動させることが重要となる。
【0003】
特許文献1に開示されている切断ロボットの切断動作制御装置では、ピアス高さと切断高さとの間の距離を示すデータが切断加工条件として設定され、切断高さに至るまでの経路のみが教示される。そして、プレイバック時には、教示された切断高さに至るまでの経路に沿って切断高さまで移動し、そこから鉛直方向上方へ切断加工条件のデータに示される距離だけ移動することによって、ピアス高さまで移動している。さらに、切断時には、鉛直方向下方へ上記データに示される距離だけ移動されて、切断が実行される。
【先行技術文献】
【特許文献】
【0004】
特開平7-88656号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示されている切断ロボットの切断動作制御装置では、切断高さまでの経路のみが教示されているため、一旦切断高さまで移動してから、それを基準としてピアス高さまで移動しなければならず、タクトタイムが長くなってしまうという問題があった。
【0006】
そこで、本発明は、プラズマ切断ロボットを適切に移動させる教示プログラムにより、タクトタイムを短縮可能なロボット制御装置及びプラズマ切断方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係るロボット制御装置は、教示によってプログラムされた、プラズマ切断ロボットの動作を制御するティーチングプレイバック式のロボット制御装置であって、プラズマ切断ロボットを動作させる教示プログラムを読み出すプログラム読出部と、読み出した教示プログラムを解釈するプログラム解釈部と、解釈した教示プログラムを実行するプログラム実行部と、を備え、プログラム解釈部は、教示プログラムにおいて、プラズマ切断用のアーク開始条件を含むプラズマ切断開始命令を解釈した際には、当該プラズマ切断開始命令後の移動命令に教示されている位置情報を用いて、当該プラズマ切断開始命令におけるアーク開始条件に含まれるプラズマ切断ロボットにおけるトーチのアーク開始高さを設定する。
【0008】
この態様によれば、プログラム解釈部は、プログラム読出部によって読み出された教示プログラムを解釈し、アーク開始条件を含むプラズマ切断開始命令を解釈した際には、当該プラズマ切断開始命令後の移動命令に教示されている位置情報を用いて、当該プラズマ切断開始命令におけるアーク開始条件に含まれるアーク開始高さを設定する。そして、プログラム実行部は、プログラム解釈部によって解釈された教示プログラムを実行する。これにより、プラズマ切断ロボットを適切に移動させる教示プログラムにより、タクトタイムを短縮することができる。また、移動命令に教示されている位置情報を用いて、当該プラズマ切断開始命令におけるアーク開始条件に含まれるアーク開始高さを設定するため、生成される教示プログラムとしては、共通のアーク開始条件を含むプラズマ切断開始命令を用いることができる。
【0009】
上記態様において、アーク開始高さは、プラズマ切断ロボットにおけるトーチの切断高さ、又は当該切断高さよりも高い点火高さであってもよい。
【0010】
この態様によれば、アーク開始高さとして、切断高さ又は点火高さが設定され、適切な高さが設定されるため、プラズマ切断ロボット(トーチ)のアーク高さへの移動時間が短縮され、タクトタイムを短縮することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
電気機器
1か月前
株式会社ダイヘン
溶接装置
23日前
株式会社ダイヘン
電圧調整装置
8日前
株式会社ダイヘン
電力システム
18日前
株式会社ダイヘン
直流電源回路
1か月前
株式会社ダイヘン
蓄電池システム
23日前
株式会社ダイヘン
インバータ装置
1か月前
株式会社ダイヘン
無線給電システム
8日前
株式会社ダイヘン
多層盛り溶接方法
10日前
株式会社ダイヘン
絶縁型コンバータ
1か月前
株式会社ダイヘン
絶縁型コンバータ
1か月前
株式会社ダイヘン
金属材料の分離方法
1日前
株式会社ダイヘン
溶接装置及び溶接方法
1か月前
株式会社ダイヘン
圧接装置及び圧接方法
24日前
株式会社ダイヘン
トランス用のコイル基板
1か月前
株式会社ダイヘン
非消耗電極アーク溶接方法
24日前
株式会社ダイヘン
2重シールドティグ溶接方法
24日前
株式会社ダイヘン
複合溶接装置及び複合溶接方法
24日前
株式会社ダイヘン
電源装置におけるケースの取付構造
23日前
株式会社ダイヘン
制御装置、および、蓄電池システム
12日前
株式会社ダイヘン
分離装置、分離方法、溶接切断装置
1か月前
株式会社ダイヘン
多電極サブマージアーク溶接システム
24日前
株式会社ダイヘン
非消耗電極アーク溶接の溶接開始方法
10日前
株式会社ダイヘン
処理装置、プログラム、及び処理方法
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
26日前
株式会社ダイヘン
固相接合装置、制御装置、および制御方法
26日前
株式会社ダイヘン
パルスアーク溶接のアークスタート制御方法
10日前
株式会社ダイヘン
搬送ロボットの教示システム、および搬送ロボットの教示方法
1か月前
個人
タップ
2日前
株式会社不二越
ドリル
26日前
日東精工株式会社
ねじ締め機
1か月前
日東精工株式会社
ねじ締め装置
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ