TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025030250
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023135377
出願日
2023-08-23
発明の名称
搬送システム、及び搬送方法
出願人
株式会社ダイフク
代理人
弁理士法人酒井国際特許事務所
主分類
B65G
47/90 20060101AFI20250228BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】物品を所定の向きで所定の場所へ搬送する。
【解決手段】搬送システムは、物品を処理する処理エリアへ前記物品を搬送する搬送装置と、パレットに積まれた物品を前記搬送装置へ受け渡す移載装置と、前記搬送装置に載せられた前記物品の向きを検出する検出部と、前記移載装置を制御する制御部と、を有し、前記制御部は、前記検出部で検出した向きが前記処理に対応した所定の向きではない場合、前記移載装置が前記物品の向きを所定の向きに変えるように前記移載装置を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
物品を処理する処理エリアへ前記物品を搬送する搬送装置と、
パレットに積まれた物品を前記搬送装置へ受け渡す移載装置と、
前記搬送装置に載せられた前記物品の向きを検出する検出部と、
前記移載装置を制御する制御部と、
を有し、
前記制御部は、前記検出部で検出した向きが前記処理に対応した所定の向きではない場合、前記移載装置が前記物品の向きを所定の向きに変えるように前記移載装置を制御する
搬送システム。
続きを表示(約 640 文字)
【請求項2】
前記検出部は、前記移載装置が前記物品を前記搬送装置に載せる載置位置より前記物品の搬送方向下流側に設けられ、
前記制御部は、前記検出部が検出した向きが前記所定の向きではない場合、所定の向きではない前記物品を前記搬送装置が前記載置位置へ搬送するように前記搬送装置を制御し、前記検出部の位置から前記載置位置へ搬送された前記物品の向きを前記移載装置が前記所定の向きに変えるように前記移載装置を制御する
請求項1に記載の搬送システム。
【請求項3】
前記制御部は、前記検出部が検出した向きが前記所定の向きではない場合、前記検出部で検出した位置で前記移載装置が前記物品の向きを前記所定の向きに変えるように前記移載装置を制御する
請求項1に記載の搬送システム。
【請求項4】
前記検出部より前記物品の搬送方向下流側に前記所定の向きに対する前記物品の傾きを直すガイド部を有する
請求項1に記載の搬送システム。
【請求項5】
物品を処理する処理エリアへ前記物品を搬送する搬送装置へ、移載装置がパレットに積まれた物品を受け渡す移載ステップと、
前記搬送装置に載せられた前記物品の向きを検出する検出ステップと、
前記検出ステップで検出した向きが前記処理に対応した所定の向きではない場合、前記移載装置が前記物品の向きを所定の向きに変える修正ステップと、
を備える搬送方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送システム、及び搬送方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
パレット上の物品をパレットから降ろすデパレタイズを行なって物品を所定の場所まで搬送する発明として、例えば特許文献1に開示された物品の取扱施設がある。この取扱施設では、物品が積まれたパレットが搬送用コンベヤでロボット装置の位置まで移動する。ロボット装置は、パレットに積まれている物品をデパレタイズして、物品を所定の場所まで搬送するための搬出用コンベヤに載せる。搬出用コンベヤに載せられた物品は所定の場所まで搬送される。
【先行技術文献】
【特許文献】
【0003】
特許第4352965号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
パレット上に積まれた物品を所定の場所まで搬送するシステムにおいては、例えば物品を所定の向きで搬送することが要求される場合がある。このような要求がされるシステムは、例えば物品が粉粒体を収納した袋であり、この袋をパレットからデパレタイズし、袋から粉粒体を自動で取り出す自動開袋機へ袋をコンベヤで搬送するシステムである。自動開袋機は、袋を開くときの袋の向きが定められており、誤った向きで袋が搬送されてきた場合、袋を正常に開くことができないため、袋を自動開袋機へ搬送する際には正常に袋を開くことができるように所定の向きでコンベヤに載せる必要がある。
【0005】
本発明は、上記に鑑みてなされたものであって、物品を所定の向きで所定の場所へ搬送することを目的とする。
【課題を解決するための手段】
【0006】
本発明の搬送システムは、物品を処理する処理エリアへ前記物品を搬送する搬送装置と、パレットに積まれた物品を前記搬送装置へ受け渡す移載装置と、前記搬送装置に載せられた前記物品の向きを検出する検出部と、前記移載装置を制御する制御部と、を有し、前記制御部は、前記検出部で検出した向きが前記処理に対応した所定の向きではない場合、前記移載装置が前記物品の向きを所定の向きに変えるように前記移載装置を制御する。
【0007】
本発明の搬送方法は、物品を処理する処理エリアへ前記物品を搬送する搬送装置へ、移載装置がパレットに積まれた物品を受け渡す移載ステップと、前記搬送装置に載せられた前記物品の向きを検出する検出ステップと、前記検出ステップで検出した向きが前記処理装置に対応した所定の向きではない場合、前記移載装置が前記物品の向きを所定の向きに変える修正ステップと、を備える。
【図面の簡単な説明】
【0008】
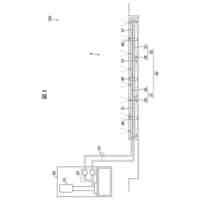
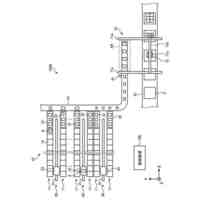
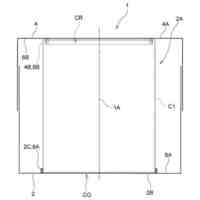
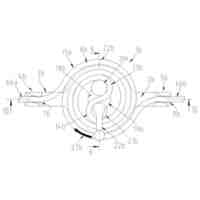
図1は、実施形態に係る搬送システムの模式的な平面図である。
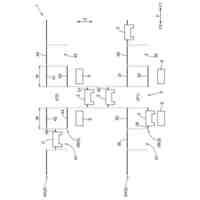
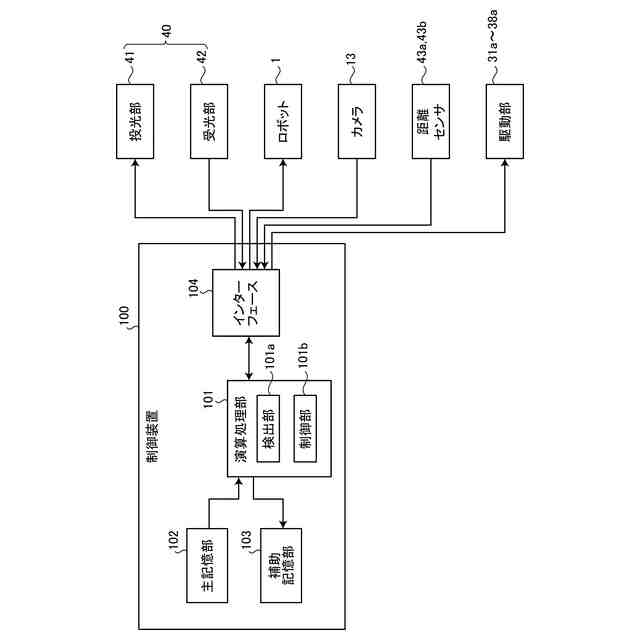
図2は、制御装置のブロック図である。
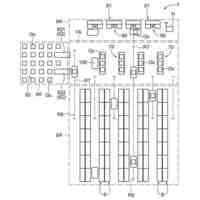
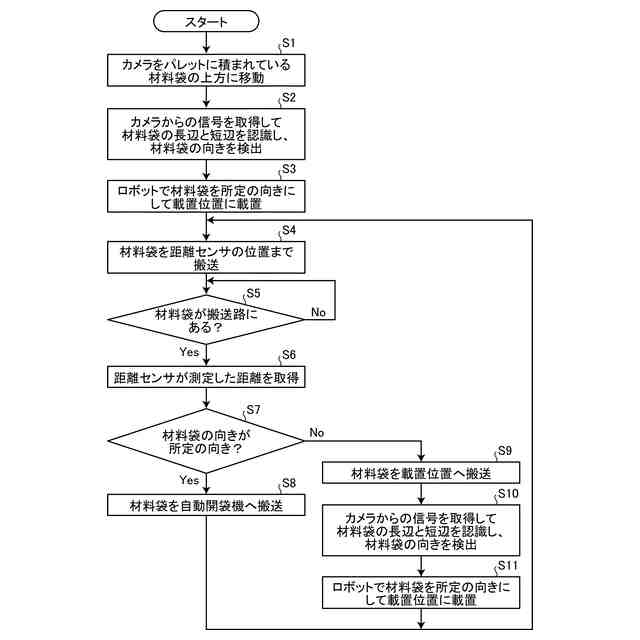
図3は、制御装置が実行する処理の流れを示すフローチャートである。
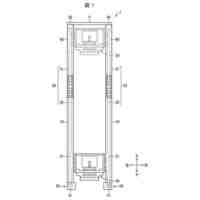
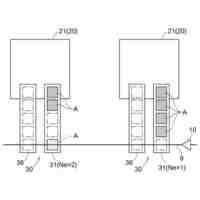
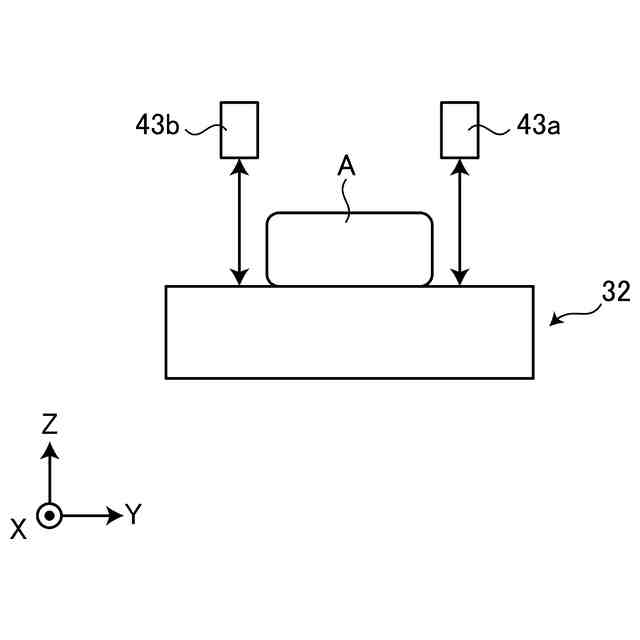
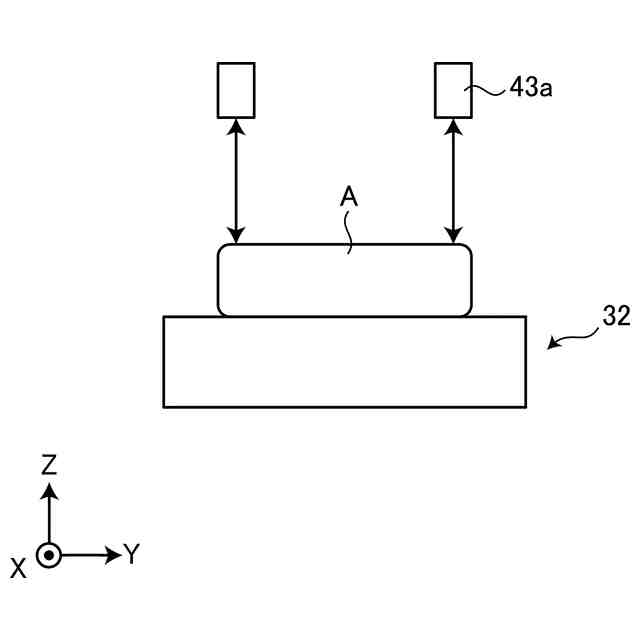
図4Aは、距離センサが距離を測定するときの状態を示す模式図である。
図4Bは、距離センサが距離を測定するときの状態を示す模式図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら、本発明の実施形態を詳細に説明する。なお、以下に説明する実施形態により本発明が限定されるものではない。また、図面の記載において、同一又は対応する要素には適宜同一の符号を付している。さらに、図面は模式的なものであり、各要素の寸法の関係などは、現実のものとは異なる場合があることに留意する必要がある。図面の相互間においても、互いの寸法の関係や比率が異なる部分が含まれている場合がある。また、図中で適宜X軸、Y軸、及びZ軸の直交座標系を示し、これにより方向を説明する。直交座標系で示される空間においてX成分が増加する方向を+X方向といい、X成分が減少する方向を-X方向という。同様に、Y、Z成分についても、+Y方向、-Y方向、+Z方向、-Z方向と定義する。なお、説明の便宜上、+Z方向を上方、-Z方向を下方と言い換える場合がある。
【0010】
[実施形態]
(実施形態の構成)
図1は、本発明の実施形態に係る搬送システム1000の模式的な平面図である。搬送システム1000は、ロボット1、搬送路31~38、投光部41、受光部42、及び距離センサ43a、43bを備えている。また、搬送システム1000は、ロボット1、及び搬送路31~38の駆動部を制御する図示省略した制御装置100を備えている。なお、制御装置100の構成については後述する。搬送システム1000は、パレットPに積まれた材料袋Aをデパレタイズして自動開袋機2へ搬送するシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイフク
搬送車
3日前
株式会社ダイフク
洗車機
24日前
株式会社ダイフク
物品搬送設備
2日前
株式会社ダイフク
物品搬送設備
16日前
株式会社ダイフク
物品保管設備
20日前
株式会社ダイフク
物品保管設備
20日前
株式会社ダイフク
容器搬送設備
23日前
株式会社ダイフク
容器搬送設備
23日前
株式会社ダイフク
物品搬送装置
23日前
株式会社ダイフク
物品移載装置
1か月前
株式会社ダイフク
物品保管設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
搬送システム、及び搬送方法
2日前
株式会社ダイフク
物品処理システム及び物品処理方法
2日前
株式会社ダイフク
物品処理システム、及び物品処理方法
2日前
個人
箱
4か月前
個人
包装体
5か月前
個人
ゴミ箱
4か月前
個人
収納用具
8か月前
個人
物品収納具
8か月前
個人
容器
1か月前
個人
パウチ補助具
4か月前
個人
土嚢運搬器具
24日前
個人
折り畳み水槽
5か月前
個人
掃除楽々ゴミ箱
9か月前
個人
ダンボール宝箱
5か月前
個人
閉塞装置
2か月前
個人
コード類収納具
16日前
株式会社和気
包装用箱
1か月前
個人
圧縮収納袋
5か月前
個人
ゴミ処理機
1か月前
積水樹脂株式会社
接着剤
9か月前
三甲株式会社
容器
8か月前
個人
粘着テープ剥がし具
10か月前
三甲株式会社
蓋体
1か月前
株式会社イシダ
箱詰装置
7か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ