TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029395
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2023134006
出願日
2023-08-21
発明の名称
磁気ディスク装置及び磁気ディスク装置の制御方法
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人スズエ国際特許事務所
主分類
G11B
5/596 20060101AFI20250227BHJP(情報記憶)
要約
【課題】 ライト性能を低下させることなく、隣接トラックの品質悪化を防止できる磁気ディスク装置を提供する。
【解決手段】 磁気ディスクと、磁気ヘッドと、オフトラックライトテーブルを有し、前記磁気ヘッドの位置決めを行い、前記トラックにおけるデータがライトされたアドレスと、前記アドレスでの前記磁気ヘッドの前記トラックに対する位置決め誤差と、を前記オフトラックライトテーブルに登録するコントローラと、を備え、前記コントローラは、データを第1セクタにライトする際、前記第1セクタから半径方向において2トラック先に位置する第2セクタの位置決め誤差に基づいて、前記第1セクタの位置決め目標位置を補正する、磁気ディスク装置。
【選択図】 図1
特許請求の範囲
【請求項1】
磁気ディスクと、
前記磁気ディスクの所定のトラックピッチで設けられたトラックに位置決めされて、前記トラックにデータをライトし、前記トラックからデータをリードする磁気ヘッドと、
オフトラックライトテーブルを有し、前記磁気ヘッドの位置決めを行い、前記トラックにおけるデータがライトされたアドレスと、前記アドレスでの前記磁気ヘッドの前記トラックに対する位置決め誤差と、を前記オフトラックライトテーブルに登録するコントローラと、を備え、
前記コントローラは、データを第1セクタにライトする際、前記第1セクタから半径方向において2トラック先に位置する第2セクタの位置決め誤差に基づいて、前記第1セクタの位置決め目標位置を補正する、
磁気ディスク装置。
続きを表示(約 2,000 文字)
【請求項2】
前記コントローラは、前記第2セクタが未登録の状態、又は前記第1セクタと前記第2セクタとの間のセクタにライトされているデータよりも以前に前記第2セクタにデータがライトされている場合、前記第2セクタを非アクティブ状態と判断し、前記第2セクタの位置決め誤差を0とする、
請求項1に記載の磁気ディスク装置。
【請求項3】
前記コントローラは、前記第1セクタから2トラック内周側に位置する第3セクタの位置決め誤差と、前記第1セクタから2トラック外周側に位置する第4セクタの位置決め誤差とに基づいて、前記第1セクタの位置決め目標位置を補正する、
請求項1に記載の磁気ディスク装置。
【請求項4】
前記コントローラは、前記第3セクタの位置決め誤差に前記第4セクタの位置決め誤差を加算して得られた値の半分の値である補正量に基づいて、前記第1セクタの位置決め目標位置を補正する、
請求項3に記載の磁気ディスク装置。
【請求項5】
前記コントローラは、
前記第3セクタが未登録の状態、又は前記第1セクタと前記第3セクタとの間のセクタにライトされているデータよりも以前に前記第3セクタにデータがライトされている場合、前記第3セクタを非アクティブ状態と判断し、前記第3セクタの位置決め誤差を0とし、
前記第4セクタが未登録の状態、又は前記第1セクタと前記第4セクタとの間のセクタにライトされているデータよりも以前に前記第4セクタにデータがライトされている場合、前記第4セクタを非アクティブ状態と判断し、前記第4セクタの位置決め誤差を0とし、
前記第3セクタ又は前記第4セクタが非アクティブ状態である場合、前記補正量を基に補正された位置決め目標位置よりも、前記第3セクタ及び前記第4セクタのうち非アクティブ状態と判断されたセクタ側にオフセットさせるように、前記第1セクタの位置決め目標位置を補正する、
請求項4に記載の磁気ディスク装置。
【請求項6】
前記コントローラは、
前記半径方向に直交する円周方向において前記第1セクタに隣接する一対のセクタに対して、前記一対のセクタから2トラック内周側に位置するセクタの位置決め誤差に前記一対のセクタから2トラック外周側に位置するセクタの位置決め誤差を加算して得られた値の半分の値である補正量初期値を算出し、
前記一対のセクタのうち一方のセクタの補正量初期値に前記一対のセクタのうちの他方のセクタの初期補正量に加算して得られた値の半分の値である補助オフセット量を算出し、
前記補正量に前記補助オフセット量を加算して得られた値の半分の値である補正量最適値を算出し、
前記補正量最適値に基づいて、前記第1セクタの位置決め目標位置を補正する、
請求項4に記載の磁気ディスク装置。
【請求項7】
2トラック内周側のセクタの位置決め誤差に2トラック外周側のセクタの位置決め誤差を加算して得られた値の半分の値である補正量初期値を、前記半径方向に直交する円周方向において、前記第1セクタから第1方向に並ぶ所定数のセクタと、前記第1セクタから前記第1方向と反対の第2方向に位置する所定数のセクタとに対して算出し、
前記所定数のセクタにおける補正量初期値及び前記補正量の線形結合により補正量最適値を算出し、
前記補正量最適値に基づいて、前記第1セクタの位置決め目標位置を補正する、
請求項4に記載の磁気ディスク装置。
【請求項8】
前記コントローラは、
前記第3セクタの位置決め誤差及び前記第4セクタの位置決め誤差に基づいて、前記第1セクタへのライト動作を停止するか否かを判断するための閾値を算出し、
前記閾値に基づいて、前記第1セクタの位置決め目標位置を補正する、
請求項3に記載の磁気ディスク装置。
【請求項9】
磁気ディスクと、前記磁気ディスクの所定のトラックピッチで設けられたトラックに位置決めされて、前記トラックにデータをライトし、前記トラックからデータをリードする磁気ヘッドと、オフトラックライトテーブルと、を備える磁気ディスク装置の制御方法であって、
前記磁気ヘッドの位置決めを行い、
前記トラックにおけるデータがライトされたアドレスと、前記アドレスでの前記磁気ヘッドの前記トラックに対する位置決め誤差と、を前記オフトラックライトテーブルに登録し、
データを第1セクタにライトする際、前記第1セクタから半径方向において2トラック先に位置する第2セクタの位置決め誤差に基づいて、前記第1セクタの位置決め目標位置を補正する、
磁気ディスク装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、磁気ディスク装置及び磁気ディスク装置の制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
磁気ディスク装置は、磁気ディスク、磁気ディスクにライト/リードする磁気ヘッド、システムコントローラ等を備えている。
システムコントローラは、磁気ディスク上に概同心円状に形成された複数のトラックに対する磁気ヘッドの位置決め制御(以下、「位置決め」とも称する)を行う。磁気ヘッドは、位置決め制御誤差により、トラックに対して磁気ディスクの半径方向へオフトラックして位置決めされる。オフトラック量が大きいと隣接するトラックに記録されているデータを消去する危険性が高まる。データ消去を回避するために小さなオフトラック量でライトを停止させると、ライト性能が低下する。
【先行技術文献】
【特許文献】
【0003】
米国特許第11373684号公報
米国特許第7245447号公報
米国特許第9892749号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本実施形態は、ライト性能を低下させることなく、隣接トラックの品質悪化を防止できる磁気ディスク装置及び磁気ディスク装置の制御方法を提供することにある。
【課題を解決するための手段】
【0005】
一実施形態に係る磁気ディスク装置は、磁気ディスクと、前記磁気ディスクの所定のトラックピッチで設けられたトラックに位置決めされて、前記トラックにデータをライトし、前記トラックからデータをリードする磁気ヘッドと、オフトラックライトテーブルを有し、前記磁気ヘッドの位置決めを行い、前記トラックにおけるデータがライトされたアドレスと、前記アドレスでの前記磁気ヘッドの前記トラックに対する位置決め誤差と、を前記オフトラックライトテーブルに登録するコントローラと、を備え、前記コントローラは、データを第1セクタにライトする際、前記第1セクタから半径方向において2トラック先に位置する第2セクタの位置決め誤差に基づいて、前記第1セクタの位置決め目標位置を補正する。
【0006】
また、一実施形態に係る磁気ディスク装置の制御方法は、磁気ディスクと、前記磁気ディスクの所定のトラックピッチで設けられたトラックに位置決めされて、前記トラックにデータをライトし、前記トラックからデータをリードする磁気ヘッドと、オフトラックライトテーブルと、を備える磁気ディスク装置の制御方法であって、
前記磁気ヘッドの位置決めを行い、前記トラックにおけるデータがライトされたアドレスと、前記アドレスでの前記磁気ヘッドの前記トラックに対する位置決め誤差と、を前記オフトラックライトテーブルに登録し、データを第1セクタにライトする際、前記第1セクタから半径方向において2トラック先に位置する第2セクタの位置決め誤差に基づいて、前記第1セクタの位置決め目標位置を補正する。
【図面の簡単な説明】
【0007】
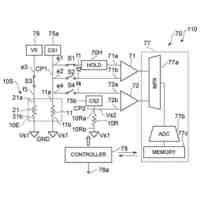
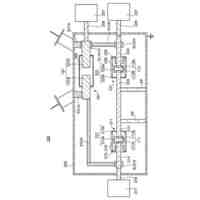
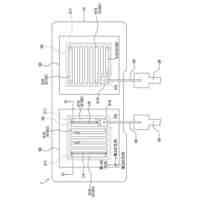
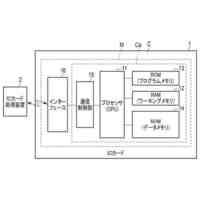
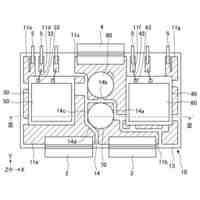
図1は、第1実施形態に係る磁気ディスク装置の構成を示すブロック図である。
図2は、第1実施形態に係る磁気ディスク装置のライト処理の一例を示す図である。
図3は、第1実施形態に係る磁気ディスク装置のライト処理の一例を示す図である。
図4は、第1実施形態に係る磁気ディスク装置の制御構成の一例を示すブロック図である。
図5は、第1実施形態に係る磁気ディスク装置の制御構成の一例を示す図である。
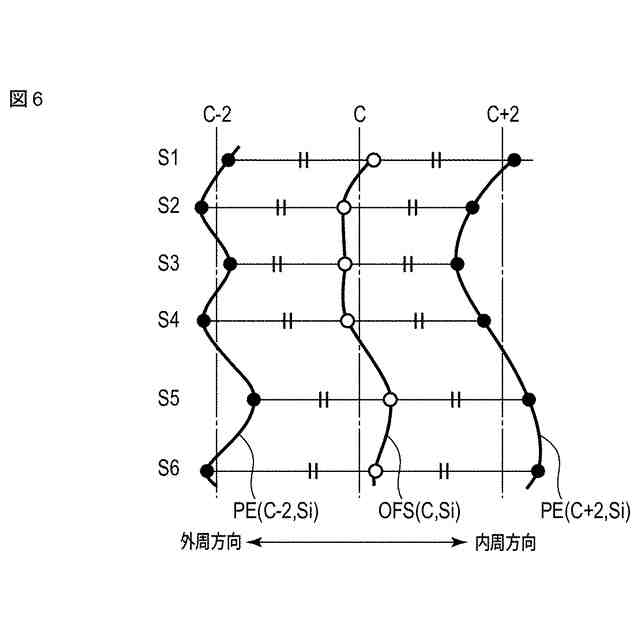
図6は、目標位置の補正量と、2トラック先のセクタにライトされているデータの位置決め誤差と、を示す概略図である。
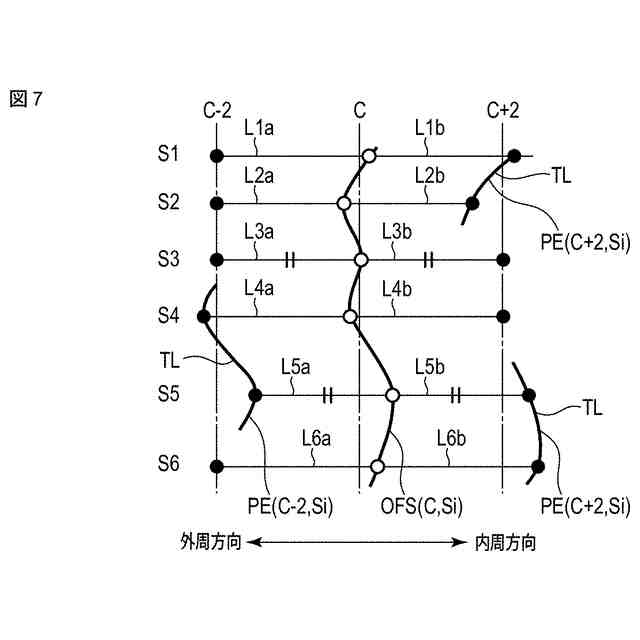
図7は、目標位置の補正量と、2トラック先のセクタにライトされているデータの位置決め誤差と、を示す概略図である。
図8は、目標位置の補正量と、2トラック先のセクタにライトされているデータの位置決め誤差と、を示す概略図である。
図9は、目標位置の補正量と、2トラック先のセクタにライトされているデータの位置決め誤差と、を示す概略図である。
図10は、サンプリング処理の一例を説明するための概略図である。
図11は、第2実施形態に係る磁気ディスク装置のライト処理の一例を示す図である。
図12は、第2実施形態に係る磁気ディスク装置のライト処理の一例を示す図である。
図13は、第2実施形態に係る磁気ディスク装置の制御構成の一例を示すブロック図である。
図14は、目標位置の補正量と、2トラック先のセクタにライトされているデータの位置決め誤差と、目標セクタに対するオフトラックスライスと、を示す概略図である。
図15は、目標位置の補正量と、目標セクタに対するオフトラックスライスと、を示す概略図である。
【発明を実施するための形態】
【0008】
以下に、実施の形態について図面を参照して説明する。なお、図面は一例であって、発明の範囲を限定するものではない。
図1は、第1実施形態に係る磁気ディスク装置1の構成を示すブロック図である。
図1に示すように、磁気ディスク装置1は、後述するヘッドディスクアセンブリ(HDA)と、ドライバIC20と、ヘッドアンプ集積回路(以下、ヘッドアンプIC、又はプリアンプと称する場合もある)30と、揮発性メモリ70と、不揮発性メモリ80と、バッファメモリ90と、1チップの集積回路であるシステムコントローラ130と、を備えている。また、磁気ディスク装置1は、ホストシステム(ホスト)100と接続されている。
【0009】
HDAは、磁気ディスク(以下、「ディスク」と称する)10と、スピンドルモータ(SPM)12と、磁気ヘッド15を搭載しているアーム13と、ボイスコイルモータ(VCM)14と、を有している。ディスク10は、スピンドルモータ12に取付けられ、スピンドルモータ12の駆動により回転する。アーム13及びボイスコイルモータ14は、アクチュエータを構成している。アクチュエータは、ボイスコイルモータ14の駆動により、アーム13に搭載されている磁気ヘッド15をディスク10の所定の位置まで移動制御する。ディスク10及び磁気ヘッド15は、2つ以上設けられてもよい。
【0010】
以下、磁気ディスク装置1の各部及び外部機器、例えば、ディスク10にライトするデータをライトデータと称する場合もあるし、磁気ディスク装置1の各部及び外部機器、例えば、ディスク10からリードされたデータをリードデータと称する場合もある。ライトデータを単にデータと称する場合もあるし、リードデータを単にデータと称する場合もあるし、ライトデータ及びリードデータをまとめてデータと称する場合もある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
2日前
株式会社東芝
センサ
16日前
株式会社東芝
計算装置
23日前
株式会社東芝
電子機器
9日前
株式会社東芝
電子機器
9日前
株式会社東芝
電子装置
16日前
株式会社東芝
計測装置
10日前
株式会社東芝
回転電機
2日前
株式会社東芝
遮断装置
16日前
株式会社東芝
電源回路
1か月前
株式会社東芝
半導体装置
16日前
株式会社東芝
ガス遮断器
1か月前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
穴検出装置
10日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
24日前
株式会社東芝
水処理装置
1か月前
株式会社東芝
蓄電池装置
24日前
株式会社東芝
半導体装置
16日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
ICカード
23日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
2日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
20日前
株式会社東芝
半導体装置
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ