TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021520
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125270
出願日
2023-08-01
発明の名称
3次元計測装置、部品実装装置、及び3次元計測方法
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G01B
11/25 20060101AFI20250206BHJP(測定;試験)
要約
【課題】部品の少なくとも一部の3次元形状の計測処理を高速化すること。
【解決手段】3次元計測装置は、部品のボディ部から突出する突出部のモデルの3次元点群データを示すモデル点群データを記憶するモデル点群データ記憶部と、モデル点群データと3次元センサにより検出された部品の3次元点群データを示す検出点群データとを照合して、検出点群データの演算範囲を決定する演算範囲決定部と、演算範囲の検出点群データに基づいて、突出部の3次元形状を算出する3次元形状算出部と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
部品のボディ部から突出する突出部のモデルの3次元点群データを示すモデル点群データを記憶するモデル点群データ記憶部と、
前記モデル点群データと3次元センサにより検出された前記部品の3次元点群データを示す検出点群データとを照合して、前記検出点群データの演算範囲を決定する演算範囲決定部と、
前記演算範囲の前記検出点群データに基づいて、前記突出部の3次元形状を算出する3次元形状算出部と、を備える、
3次元計測装置。
続きを表示(約 850 文字)
【請求項2】
前記演算範囲決定部は、前記モデル点群データと前記検出点群データとの一致度に基づいて、前記演算範囲を決定する、
請求項1に記載の3次元計測装置。
【請求項3】
前記演算範囲決定部は、前記モデル点群データと前記検出点群データとの照合結果に基づいて、前記ボディ部を含まず前記突出部を含む前記演算範囲を決定する、
請求項2に記載の3次元計測装置。
【請求項4】
前記演算範囲決定部は、前記検出点群データの解像度を下げた後、前記モデル点群データと前記検出点群データとを照合して、前記演算範囲を決定する、
請求項1に記載の3次元計測装置。
【請求項5】
前記演算範囲決定部は、前記突出部のサイズが大きいほど、前記解像度を下げる、
請求項4に記載の3次元計測装置。
【請求項6】
前記3次元形状算出部は、前記検出点群データの解像度を上げた後、前記突出部の3次元形状を算出する、
請求項4に記載の3次元計測装置。
【請求項7】
基板に実装される部品を保持した状態で駆動するロボットマニピュレータと、
前記部品の3次元形状を計測する請求項1に記載の3次元計測装置と、
前記3次元計測装置の計測処理結果に基づいて、前記部品が基板に実装されるように、前記ロボットマニピュレータを制御する制御装置と、を備える、
部品実装装置。
【請求項8】
部品のボディ部から突出する突出部のモデルの3次元点群データを示すモデル点群データを取得することと、
前記モデル点群データと3次元センサにより検出された前記部品の3次元点群データを示す検出点群データとを照合して、前記検出点群データの演算範囲を決定することと、
前記演算範囲の前記検出点群データに基づいて、前記突出部の3次元形状を算出することと、を含む、
3次元計測方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、3次元計測装置、部品実装装置、及び3次元計測方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
部品実装装置に係る技術分野において、特許文献1に開示されているような、3次元計測装置を備える電子部品実装装置が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2019-144137号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
部品実装装置を用いて電子機器を効率良く生産するために、基板に実装される部品の少なくとも一部の3次元形状の計測処理を高速化することが要望される。
【課題を解決するための手段】
【0005】
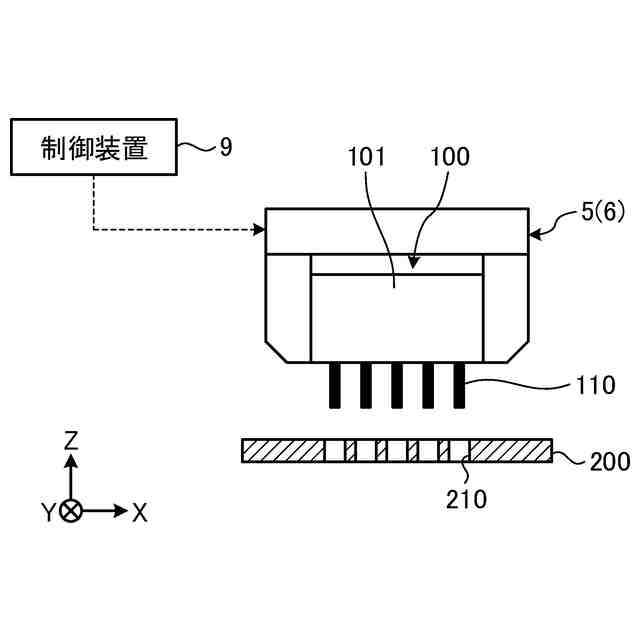
本明細書は、3次元計測装置を開示する。3次元計測装置は、部品のボディ部から突出する突出部のモデルの3次元点群データを示すモデル点群データを記憶するモデル点群データ記憶部と、モデル点群データと3次元センサにより検出された部品の3次元点群データを示す検出点群データとを照合して、検出点群データの演算範囲を決定する演算範囲決定部と、演算範囲の検出点群データに基づいて、突出部の3次元形状を算出する3次元形状算出部と、を備える。
【発明の効果】
【0006】
本明細書で開示する技術によれば、部品の少なくとも一部の3次元形状の計測処理が高速化される。
【図面の簡単な説明】
【0007】
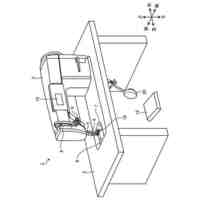
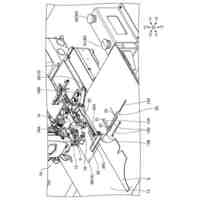
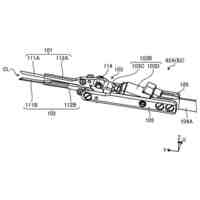
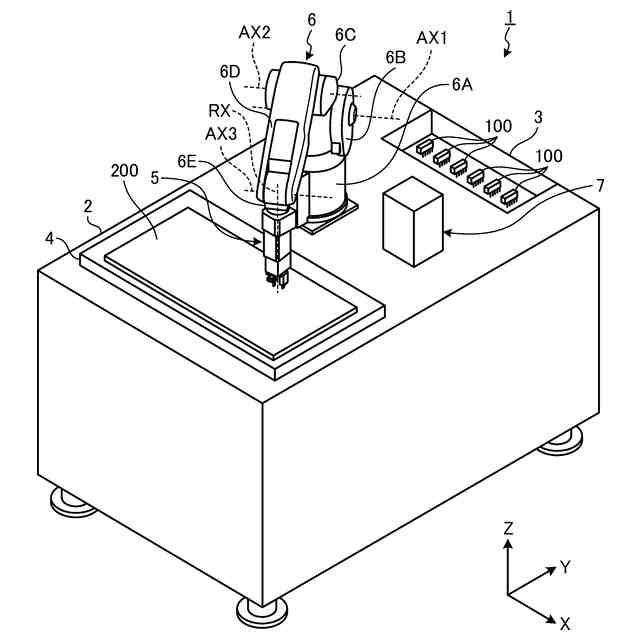
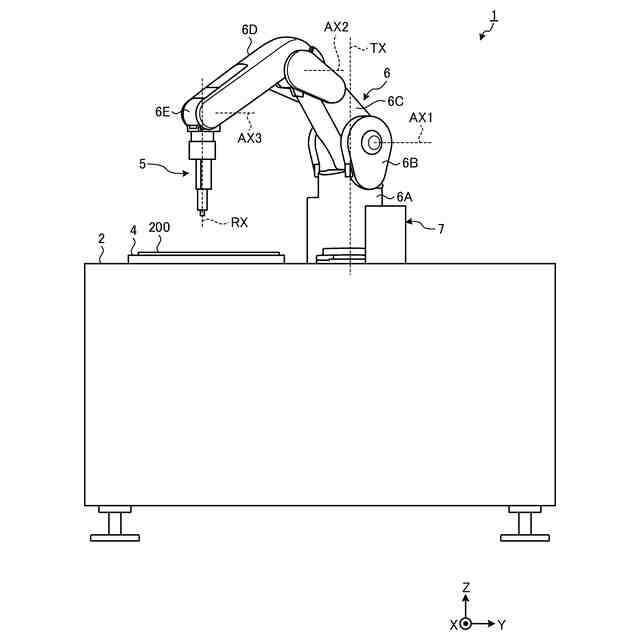
図1は、実施形態に係る部品実装装置を示す斜視図である。
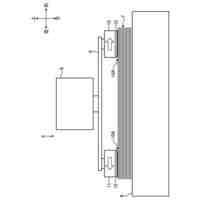
図2は、実施形態に係る部品実装装置を示す側面図である。
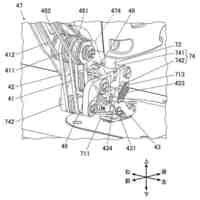
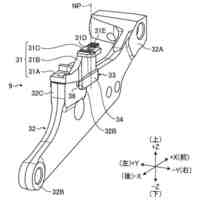
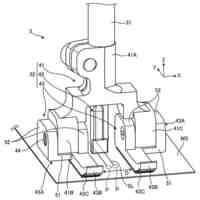
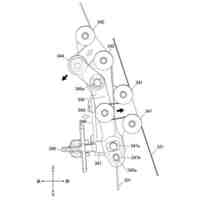
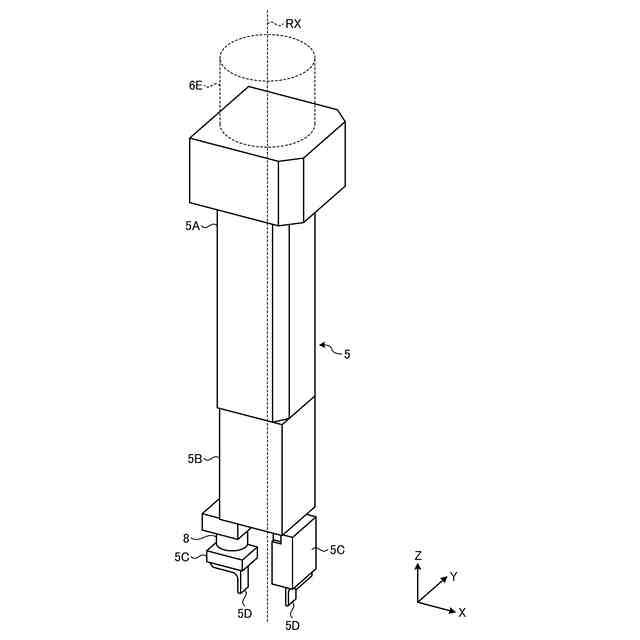
図3は、実施形態に係るロボットハンドを示す斜視図である。
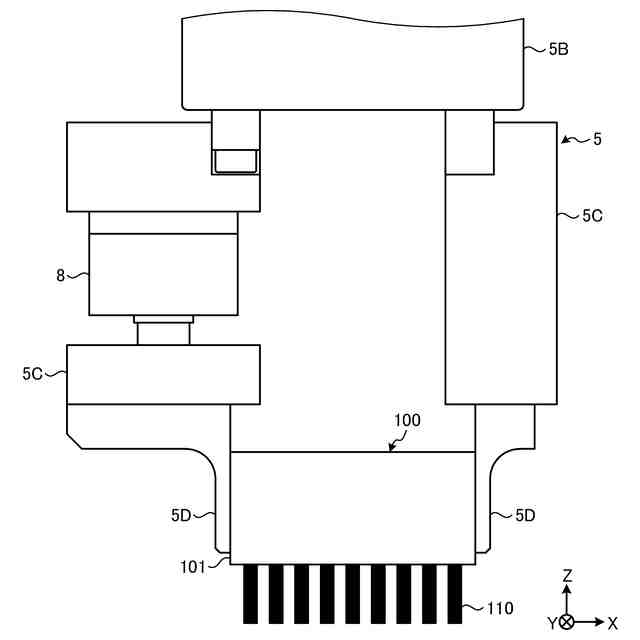
図4は、実施形態に係るロボットハンドに保持された部品を示す側面図である。
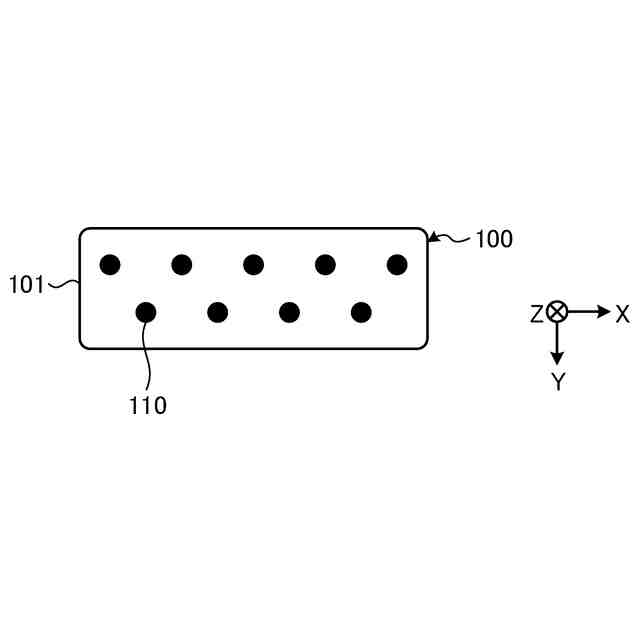
図5は、実施形態に係る部品を下方から見た図である。
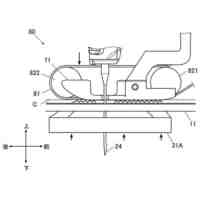
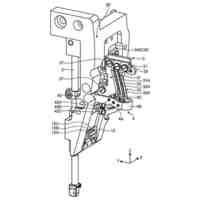
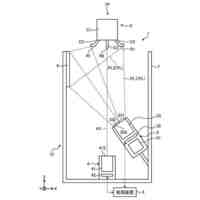
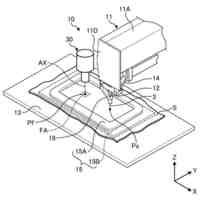
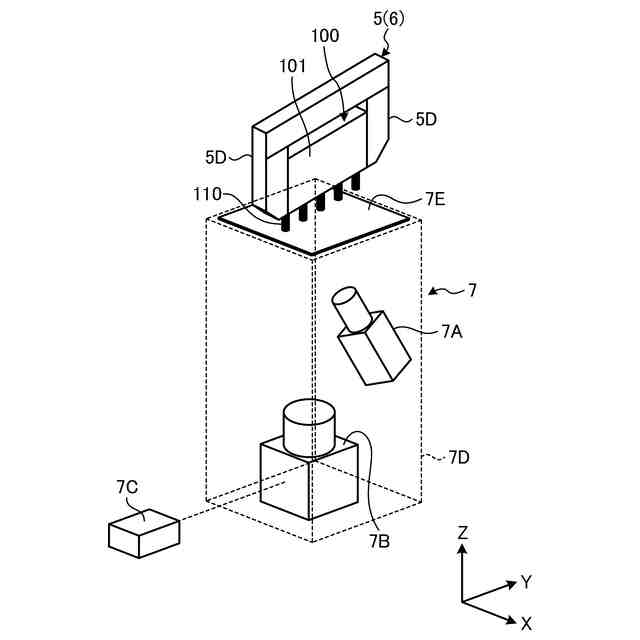
図6は、実施形態に係る3次元計測装置を示す斜視図である。
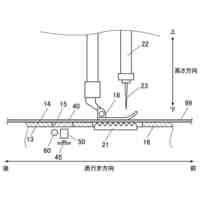
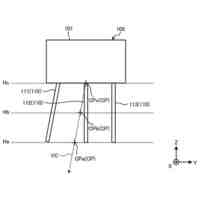
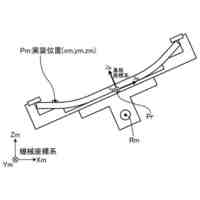
図7は、実施形態に係るロボットマニピュレータの動作を説明するための図である。
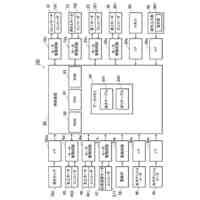
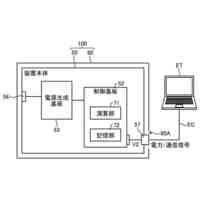
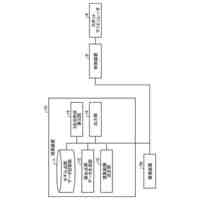
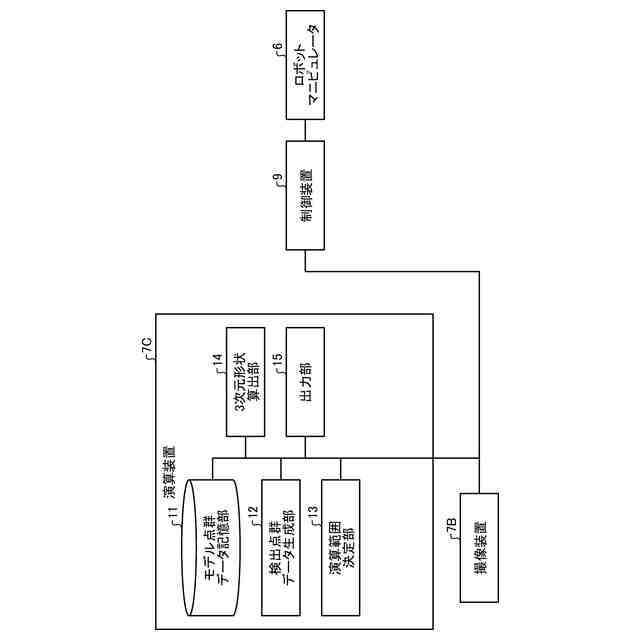
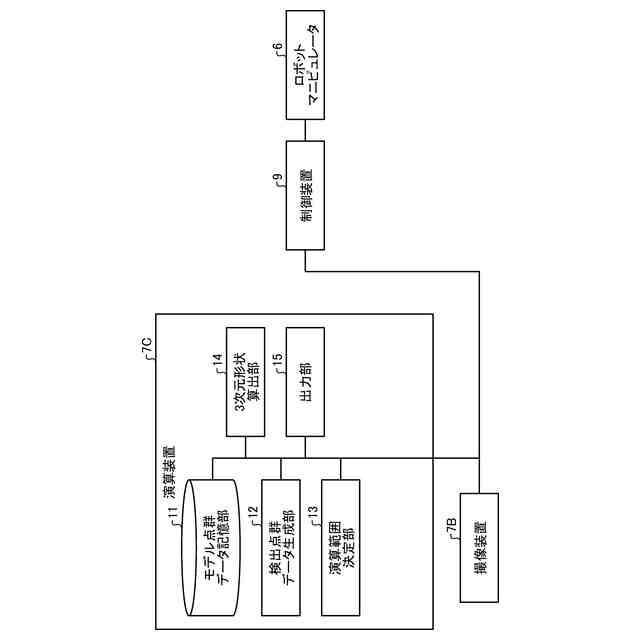
図8は、実施形態に係る部品実装装置を示すブロック図である。
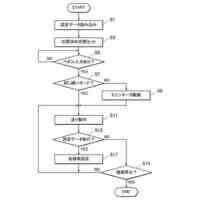
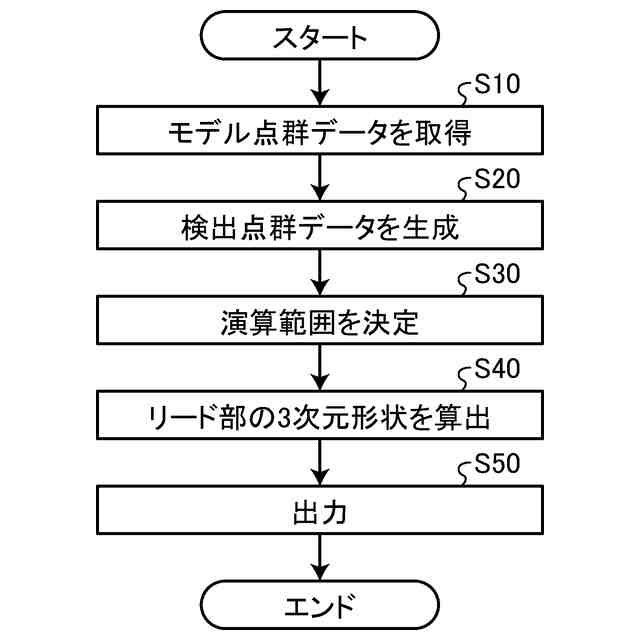
図9は、実施形態に係るリード部の3次元計測方法を示すフローチャートである。
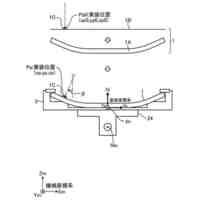
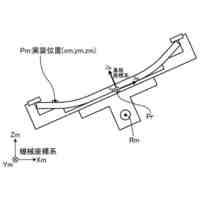
図10は、実施形態に係るモデル点群データの一例を模式的に示す図である。
図11は、実施形態に係る検出点群データの一例を模式的に示す図である。
図12は、実施形態に係る演算範囲の決定方法を説明するための図である。
図13は、実施形態に係る部分点群データの一例を模式的に示す図である。
図14は、実施形態に係るコンピュータシステムを示すブロック図である。
図15は、実施形態に係るリード部の3次元計測方法を示すフローチャートである。
図16は、実施形態に係るリード部のサイズと解像度との関係を説明するための図である。
【発明を実施するための形態】
【0008】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0009】
実施形態においては、部品実装装置1にローカル座標系を設定し、ローカル座標系を参照しながら各部の位置関係について説明する。ローカル座標系として、XYZ直交座標系を設定する。所定面内においてX軸に平行な方向をX軸方向とする。所定面内においてX軸と直交するY軸に平行な方向をY軸方向とする。X軸及びY軸のそれぞれと直交するZ軸に平行な方向をZ軸方向とする。X軸を中心とする回転方向又は傾斜方向をθX方向とする。Y軸を中心とする回転方向又は傾斜方向をθY方向とする。Z軸を中心とする回転方向又は傾斜方向をθZ方向とする。所定面は、XY平面である。Z軸は、所定面と直交する。実施形態において、所定面は、水平面に平行であることとする。Z軸方向は、鉛直方向である。なお、所定面が水平面に対して傾斜していてもよい。
【0010】
第1実施形態.
第1実施形態について説明する。
[部品実装装置]
図1は、実施形態に係る部品実装装置1を示す斜視図である。図2は、実施形態に係る部品実装装置1を示す側面図である。部品実装装置1は、部品100を基板200に実装する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
今日
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
1か月前
JUKI株式会社
ミシン
4日前
JUKI株式会社
ミシン
4日前
JUKI株式会社
検査装置
2か月前
JUKI株式会社
ミシン機構
1か月前
JUKI株式会社
生地搬送装置
1か月前
JUKI株式会社
縫製システム
6日前
JUKI株式会社
ミシン制御装置
6日前
JUKI株式会社
ハンドリング装置
1か月前
JUKI株式会社
電子名刺デバイス
2か月前
JUKI株式会社
縁かがり縫いミシン
25日前
JUKI株式会社
ミシン及び縫製方法
1か月前
JUKI株式会社
部品実装装置及び部品実装方法
1か月前
JUKI株式会社
ミシン及びミシン管理システム
3か月前
JUKI株式会社
工業用ミシン及びユーザ認証方法
6日前
JUKI株式会社
縫製システムおよび補助ユニット
2か月前
JUKI株式会社
3次元計測装置及び3次元計測方法
1か月前
JUKI株式会社
縫製管理システム及び縫製管理方法
4日前
JUKI株式会社
縫製管理システム及び縫製管理方法
4日前
JUKI株式会社
縫製管理システム及び縫製管理方法
4日前
JUKI株式会社
縫製管理システム及び縫製管理方法
4日前
JUKI株式会社
ベルトループ供給装置及びベルトループ縫製装置
1か月前
JUKI株式会社
ベルトループ縫製装置及びベルトループ縫製方法
1か月前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
3か月前
JUKI株式会社
画像処理装置、ミシン、画像処理方法、及び縫製補正方法
3か月前
JUKI株式会社
実装装置、電子デバイスの製造システム、実装方法、及び電子デバイスの製造方法
1か月前
JUKI株式会社
実装装置、電子デバイスの製造システム、実装方法、及び電子デバイスの製造方法
3か月前
JUKI株式会社
レーザ照射装置、電子デバイスの製造システム、レーザ照射方法、及び電子デバイスの製造方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ