TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025015135
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023118313
出願日
2023-07-20
発明の名称
モータ駆動装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人サトー
主分類
H02P
6/20 20160101AFI20250123BHJP(電力の発電,変換,配電)
要約
【課題】電流制限時において、回転位置の推定精度が低下することを防止できるモータ駆動装置を提供する。
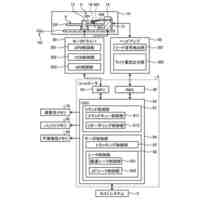
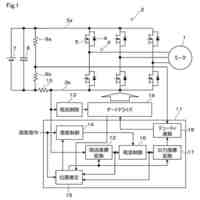
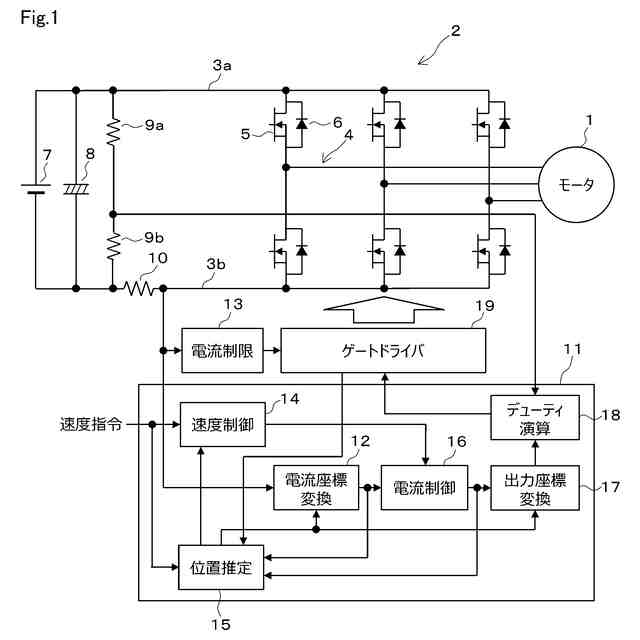
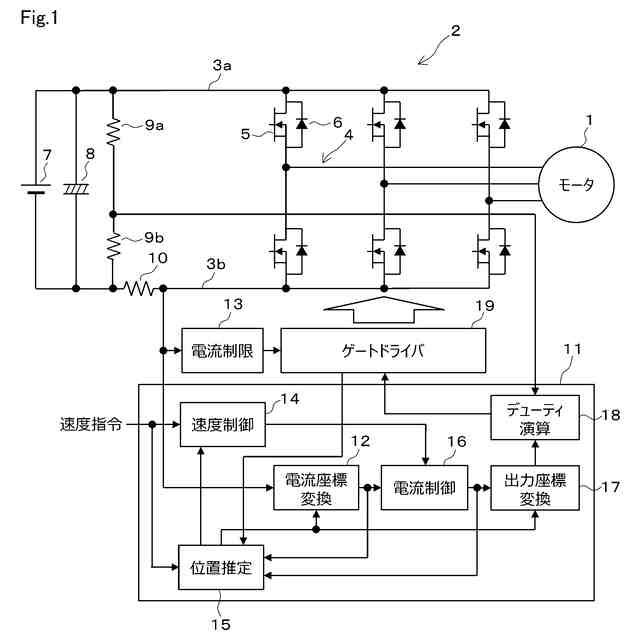
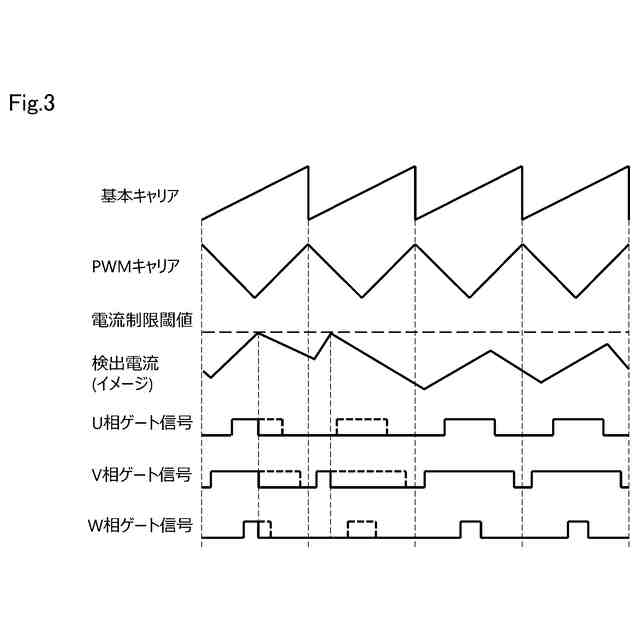
【解決手段】実施形態のモータ駆動装置は、正側及び負側半導体スイッチング素子の直列回路からなる複数のアームを並列に接続して構成され、モータを駆動する電力変換回路と、前記電力変換回路を構成する各半導体スイッチング素子に対するオンオフ信号を、PWM制御により生成して出力する制御部と、前記電力変換回路に流れる電流を検出する電流検出部と、前記電流が閾値に達すると、前記制御部の動作を停止させる電流制限部と、前記モータの回転位置を、モータ電流及びモータ電圧を用いて推定する位置推定部と、を備え、前記位置推定部は、前記制御部の動作が停止されている前記PWM制御のキャリア周期において前記回転位置の推定に用いるモータ電圧を補正する。
【選択図】図1
特許請求の範囲
【請求項1】
正側及び負側半導体スイッチング素子の直列回路からなる複数のアームを並列に接続して構成され、モータを駆動する電力変換回路と、
前記電力変換回路を構成する各半導体スイッチング素子に対するオンオフ信号を、PWM制御により生成して出力する制御部と、
前記電力変換回路に流れる電流を検出する電流検出部と、
前記電流が閾値に達すると、前記制御部の動作を停止させる電流制限部と、
前記モータの回転位置を、モータ電流及びモータ電圧を用いて推定する位置推定部と、を備え、
前記位置推定部は、前記制御部の動作が停止されている前記PWM制御のキャリア周期において、前記回転位置の推定に用いるモータ電圧を補正するモータ駆動装置。
続きを表示(約 1,300 文字)
【請求項2】
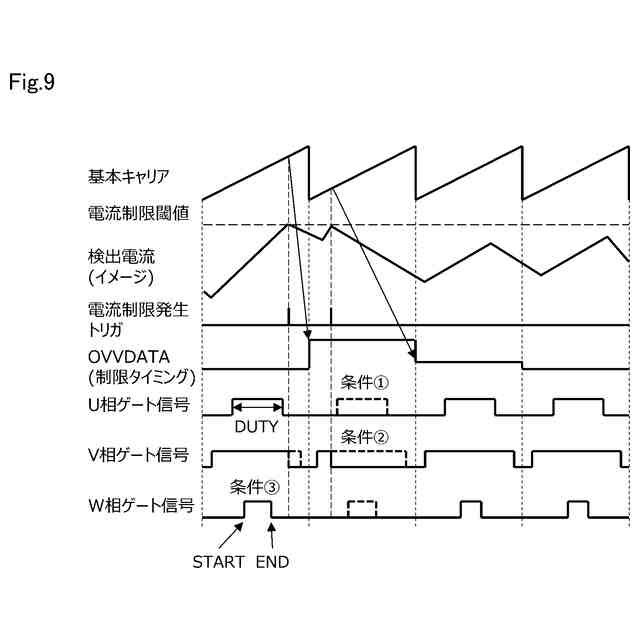
前記電流制限部は、前記電流が前記閾値を超えるとトリガ信号を出力し、
前記トリガ信号が出力された時点の、前記PWM制御におけるキャリア周期内のカウント値を電流制限発生タイミングデータとして保持するデータ保持部を備え、
前記位置推定部は、前記電流制限発生タイミングデータを用いて前記モータ電圧を補正する請求項1記載のモータ駆動装置。
【請求項3】
前記電流制限発生タイミングデータは、前記キャリア周期に同期したタイミングで前記データ保持部より出力される請求項2記載のモータ駆動装置。
【請求項4】
前記電流制限発生タイミングデータは、前記トリガ信号が出力されたキャリア周期の次の周期で、前記データ保持部より出力される請求項3記載のモータ駆動装置。
【請求項5】
前記位置推定部は、各相PWM信号の出力が開始される時点の開始カウント値と、当該出力が終了する時点の終了カウント値との何れか一方又は双方を、前記電流制限発生タイミングデータと比較することで、前記モータ電圧の補正値を決定する請求項4記載のモータ駆動装置。
【請求項6】
前記位置推定部は、前記電流制限発生タイミングデータが、前記開始カウント値よりも大で、且つ前記終了カウント値よりも小であれば、前記電流制限発生タイミングデータと前記開始カウント値との差を、当該周期にて出力を予定していたデューティ比で除すことで前記補正値を決定する請求項5記載のモータ駆動装置。
【請求項7】
前記電流検出部は、直流電源部に配置される1シャント抵抗であり、
前記電流検出部により検出された電流値を記憶する電流値記憶部を備え、
前記位置推定部は、前記回転位置の推定に、前記制御部の動作が停止する以前のキャリア周期に記憶された電流値を使用する請求項1から6の何れか一項に記載の前記モータ駆動装置。
【請求項8】
前記電流検出部は、直流電源部に配置される1シャント抵抗であり、
電流制御に使用され、外部より入力される速度指令に応じて電流指令値を決定する電流指令値決定部と、
電流指令値を記憶する指令値記憶部と、を備え、
前記位置推定部は、前記回転位置の推定に、前記制御部の動作が停止する以前のキャリア周期に記憶された電流指令値を使用する請求項1から6の何れか一項に記載の前記モータ駆動装置。
【請求項9】
正側及び負側半導体スイッチング素子の直列回路からなる複数のアームを並列に接続して構成される電力変換回路を介してモータを駆動する際に、
前記電力変換回路を構成する各半導体スイッチング素子に対するオンオフ信号をPWM制御により生成して出力し、
前記電力変換回路に流れる電流を検出し、
前記電流が閾値に達すると、オンオフ信号の出力を停止し、
前記モータの回転位置を、モータ電流及びモータ電圧を用いて推定し、
前記オンオフ信号の出力を停止している前記PWM制御のキャリア周期において、前記回転位置の推定に用いるモータ電圧を補正するモータ駆動方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、モータを駆動する装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば3相のブラシレスモータを駆動するための電力変換装置は、正負の直流電源線間に、ハーフブリッジ回路が3相分並列接続された構成となっている。ハーフブリッジ回路は、直流電源線間に直列に接続された一対の半導体スイッチング素子と、それら半導体スイッチング素子のそれぞれに逆並列接続された還流ダイオードとからなる。上記構成の電力変換装置においては、各半導体スイッチング素子の駆動がPWM(Pulse Width Modulation)制御される。これにより、直流電源線から与えられる直流電力が3相の交流電力に変換され、モータの巻線に電流が通電される。
【0003】
ブラシレスモータを駆動する回路で、特に始動トルクが必要な用途には、位置センサを使用するセンサ駆動が提案されている。しかしながら、低コスト化や小型化を実現するためには、位置センサを用いることなくブラシレスモータを制御するモータ駆動装置が求められる。
【0004】
例えば、ホール素子などの磁極センサでモータの回転位置を検出する代わりに、モータ巻線に発生する誘起電圧を利用して回転位置を検出し、これに基づいてモータ電圧を出力する方法がある。1相の通電電気角が120度の矩形波状の電圧を出力する120度矩形波駆動では、出力が停止する60度区間で誘起電圧を直接検出することが可能となる。しかしながら、120度矩形波駆動は、正弦波状の電圧を出力する180度正弦波駆動と比較して、騒音・振動の点で劣っている。
【0005】
一般的に、例えば特許文献1に開示されているように、位置センサを用いることなく正弦波駆動するため、モータ電圧方程式に基づいて誘起電圧を算出し、その誘起電圧を使って回転位置を推定する方法がある。
【0006】
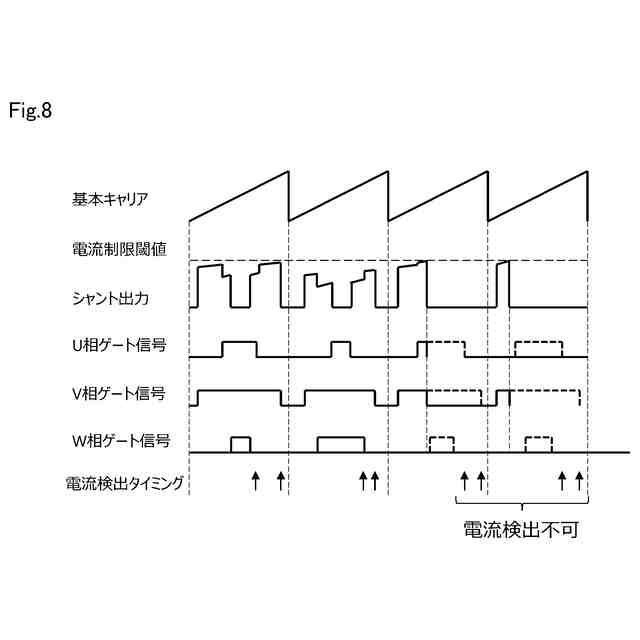
また、ブラシレスモータを精度よく制御する方法として、ベクトル制御が用いられる。ベクトル制御では、モータの3相交流電流を、直流であるトルク成分のq軸電流と磁束成分のd軸電流に変換し、両者を独立に細かく制御することで高効率、低振動での運転や、運転の範囲拡大等が可能となる。電流を制御するには、モータ電流を検出する必要があり、一般的には電流センサを2個以上使用する。しかしながら、位置センサと同様に、低コスト化や小型化を実現するために、電流センサとして高価なカレントトランスを用いずに、安価なシャント抵抗を用いる場合がある。また、システムをより低コスト化するために、シャント抵抗の数を、3つから1つに減らした1シャント電流検出方式が採用される。
【0007】
ブラシレスモータに過大な電流が流れると、ブラシレスモータの磁石が減磁したり、半導体スイッチング素子が破損するといった故障に至ることがある。そこで、モータ電流を制限するため、例えば特許文献2に開示されているように、インバータのグランドラインに配置されたシャント抵抗の電圧が、閾値値以上になるとゲート信号を遮断する機能が用いられている。
【先行技術文献】
【特許文献】
【0008】
特開2004-72906号公報
特開2007-89332号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
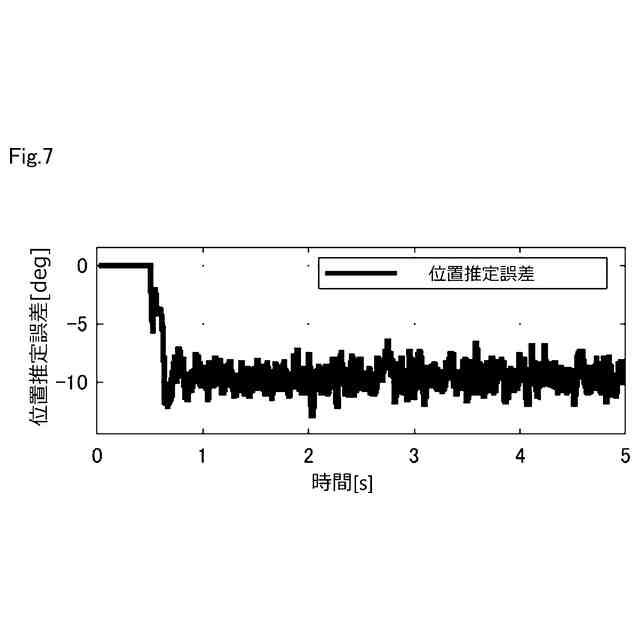
しかしながら、電流制限時にはゲート信号が遮断されるため、出力電圧が指令よりも低下するだけでなく、ゲート信号に応じてモータ電流を検出する場合は正しくモータ電流が検出できない。モータシステムの低コスト化を実現する回転位置検出器を使用しない位置推定制御では、出力電圧指令とモータ電流を使用するため、電流制限時における位置推定精度の低下が懸念される。
【0010】
そこで、電流制限時において、回転位置の推定精度が低下することを防止できるモータ駆動装置を提供する。
【課題を解決するための手段】
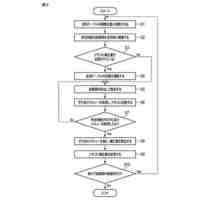
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
電源回路
8日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
8日前
株式会社東芝
水処理装置
2日前
株式会社東芝
半導体装置
2日前
株式会社東芝
半導体装置
2日前
株式会社東芝
光スイッチ
1か月前
株式会社東芝
遠心送風機
1か月前
株式会社東芝
半導体装置
14日前
株式会社東芝
ガス遮断器
1日前
株式会社東芝
半導体装置
8日前
株式会社東芝
半導体装置
21日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
半導体装置
14日前
株式会社東芝
蓋の開閉装置
1か月前
株式会社東芝
対策提示装置
1か月前
株式会社東芝
ディスク装置
1日前
株式会社東芝
ディスク装置
1日前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
ディスク装置
21日前
株式会社東芝
伝送システム
1日前
株式会社東芝
磁気記録装置
1日前
株式会社東芝
空調制御装置
14日前
株式会社東芝
電子計算機装置
1か月前
株式会社東芝
モータ駆動装置
8日前
株式会社東芝
紙葉類処理装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ