TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014449
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117012
出願日
2023-07-18
発明の名称
ロータセンタリング計測方法、ロータアライメント調整支援方法及びロータセンタリング計測装置
出願人
株式会社東芝
,
東芝エネルギーシステムズ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
11/27 20060101AFI20250123BHJP(測定;試験)
要約
【課題】高精度かつ短時間でロータアライメント調整を行うことができる。
【解決手段】実施の形態によるロータセンタリング計測方法は、各々のカップリングを介して連結された2つのロータを含むロータシステムにおいて、2つのロータのカップリング間の芯差及び面開き量を計測する方法である。ロータセンタリング計測方法は、2つのロータのカップリングに、一方のカップリングから他方のカップリングの相対位置を計測するレーザ計測装置を設置する。そして、2つのロータを共に連続回転させながら、レーザ計測装置により、カップリング間の芯差及び面開き量に関するデータを取得する。
【選択図】図10
特許請求の範囲
【請求項1】
各々のカップリングを介して連結された2つのロータを含むロータシステムにおいて、2つの前記ロータの前記カップリング間の芯差及び面開き量を計測するロータセンタリング計測方法であって、
2つの前記ロータの前記カップリングに、一方の前記カップリングから他方の前記カップリングの相対位置を計測するレーザ計測装置を設置し、
2つの前記ロータを共に連続回転させながら、前記レーザ計測装置により、前記カップリング間の芯差及び面開き量に関するデータを取得する、ロータセンタリング計測方法。
続きを表示(約 940 文字)
【請求項2】
2つの前記ロータの前記カップリングを、前記カップリングのボルト穴に連結ピンを挿入することで連結し、
前記連結ピンを介して連結した2つの前記ロータを共に連続回転させながら、前記レーザ計測装置により前記データを取得する、請求項1に記載のロータセンタリング計測方法。
【請求項3】
2つの前記ロータの前記カップリングを、複数の前記連結ピンにより連結し、
複数の前記連結ピンは、周方向において等間隔で、それぞれ前記カップリングの前記ボルト穴に挿入される、請求項2に記載のロータセンタリング計測方法。
【請求項4】
前記連結ピンの外周面に、前記ボルト穴を保護する保護筒が配置される、請求項2に記載のロータセンタリング計測方法。
【請求項5】
2つの前記ロータの前記カップリング間に、スペーサが配置される、請求項1に記載のロータセンタリング計測方法。
【請求項6】
前記カップリングの軸方向への移動を規制する軸方向移動規制装置が設置される、請求項1に記載のロータセンタリング計測方法。
【請求項7】
前記ロータの左右方向への移動を規制する左右方向移動規制装置が設置される、請求項1に記載のロータセンタリング計測方法。
【請求項8】
前記ロータを連続回転させた際の前記ロータの軸芯位置の変化量を計測し、
計測した前記ロータの軸芯位置の変化量に基づいて、前記レーザ計測装置により取得した前記データを補正して、前記ロータの停止状態における前記カップリング間の芯差及び面開き量を算出する、請求項1に記載のロータセンタリング計測方法。
【請求項9】
前記ロータの軸芯位置の変化量を、前記ロータの軸受に設置された振動計により計測する、請求項8に記載のロータセンタリング計測方法。
【請求項10】
前記ロータの軸受付近に、前記ロータの変位量を検出する変位センサを設置し、
前記ロータの軸芯位置の変化量を、前記変位センサにより計測する、請求項8に記載のロータセンタリング計測方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施の形態は、ロータセンタリング計測方法、ロータアライメント調整支援方法及びロータセンタリング計測装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
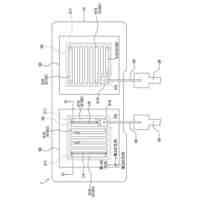
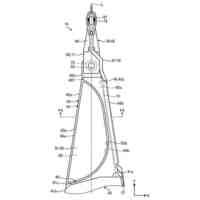
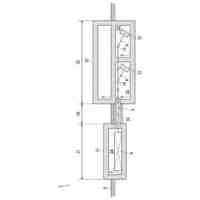
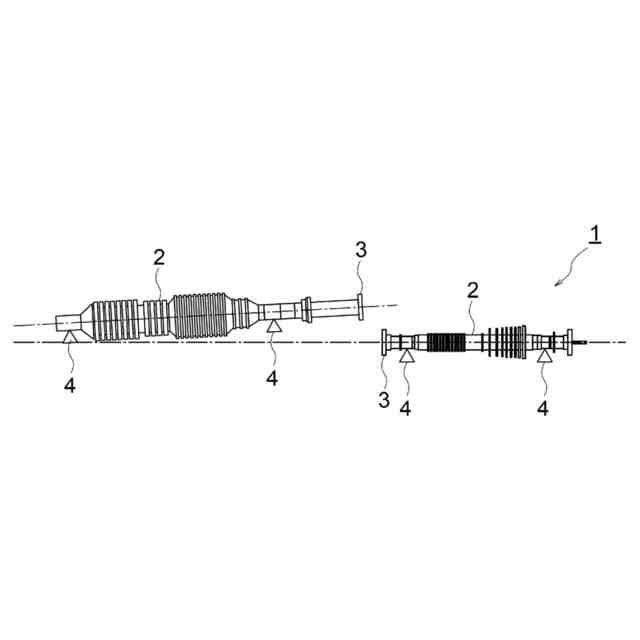
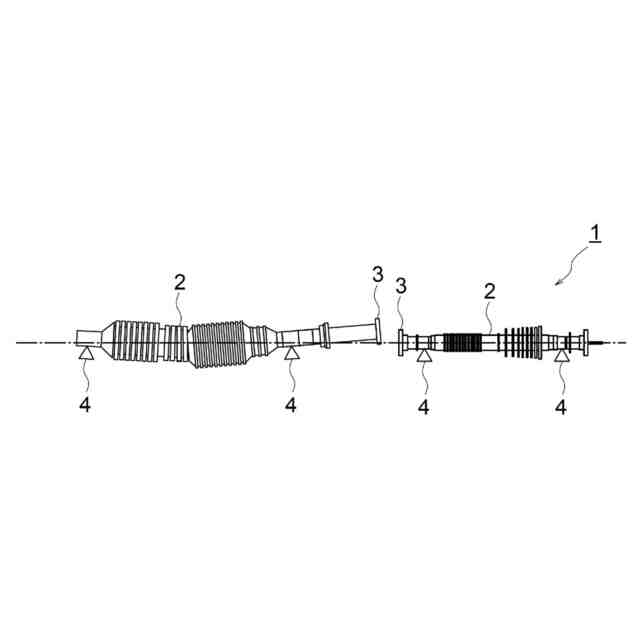
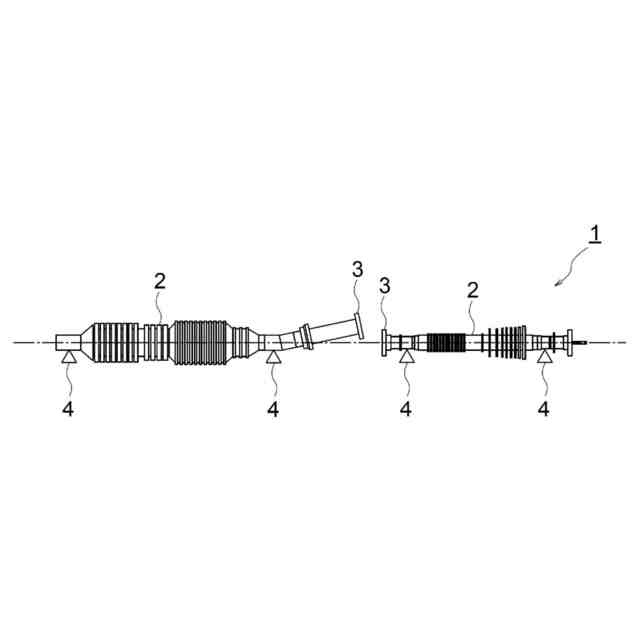
ロータシステムは、各々のカップリングを介して連結された2つのロータを含む機器である。図1は、ロータシステムの概略構成を示す模式図である。図1に示すように、ロータシステム1において、各ロータ2の端部にカップリング3が設けられており、隣接する2つのロータ2は、カップリング3を介して連結される。各ロータ2は、軸受4により支持されている。各ロータ2の位置関係をロータアライメントとも称する。
【0003】
図1に示すように、隣接する2つのロータ2間のアライメントは、2つのロータ2のカップリング3間の上下方向及び左右方向における芯差X並びに上下方向及び左右方向における面開き量Yにより一意的に表すことができる。
【0004】
一般的なロータアライメント調整では、カップリング3間の上下方向及び左右方向における芯差X及び面開き量Yを計測し、これらの芯差X及び面開き量Yを設計許容値内に調整することで、ロータ位置を計画値に調整している。このため、機器の据付時や機器メンテナンスでの分解組立時には、これらの芯差Xおよび面開き量Yを計測するセンタリング計測が行われる。ロータ位置は、ロータ2を支持する軸受4を上下方向及び左右方向に移動させることで調整される。
【0005】
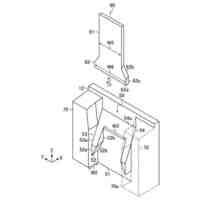
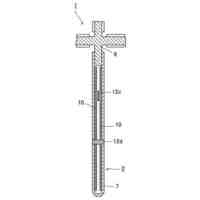
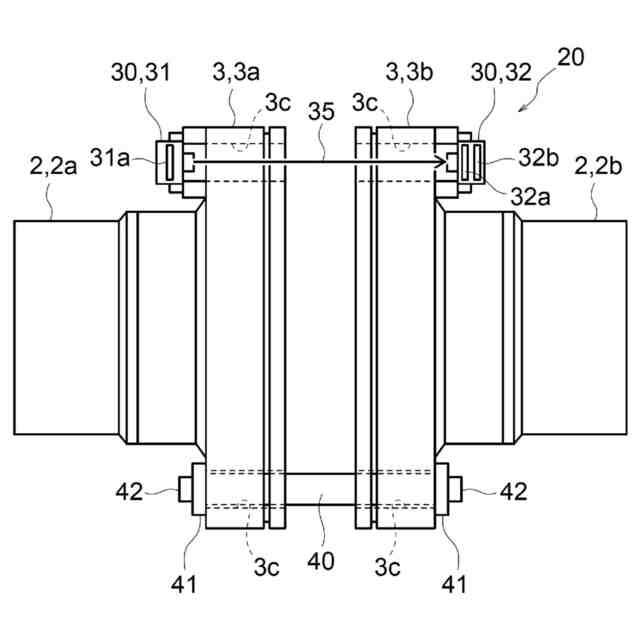
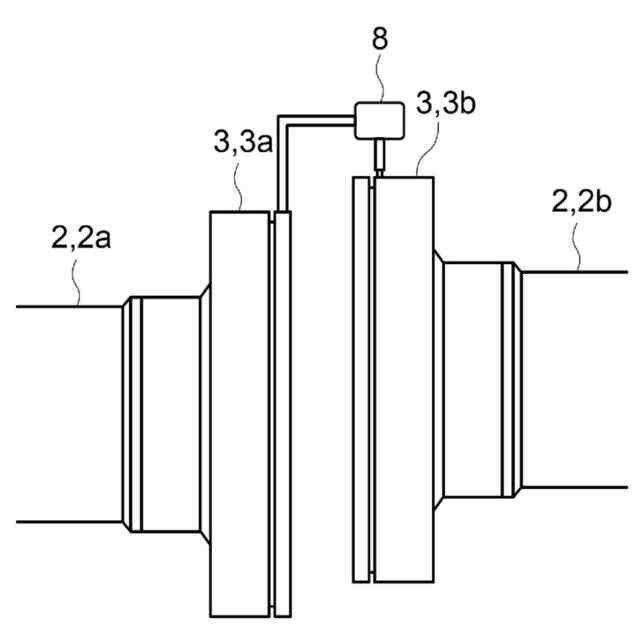
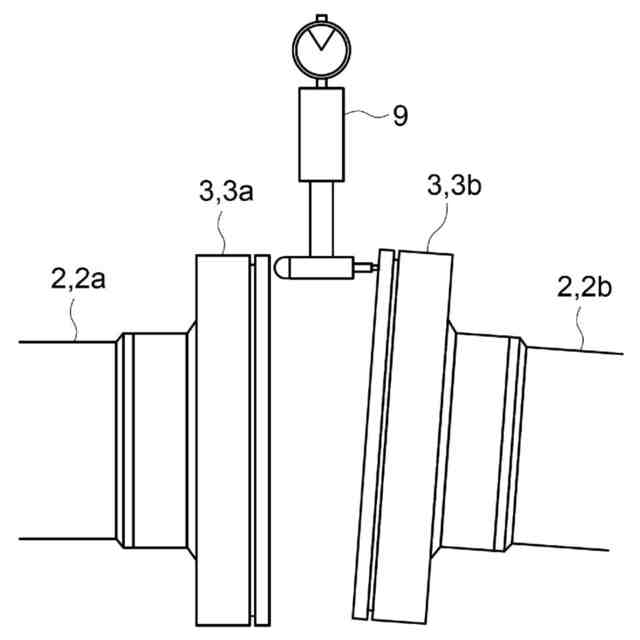
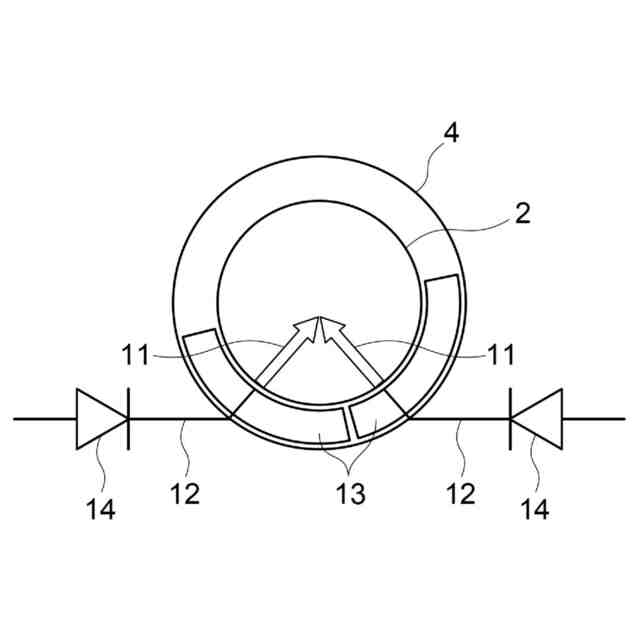
ここで、一般的なセンタリング計測について説明する。図2及び図3は、一般的なセンタリング計測時において、ロータシステムの2つのカップリングを拡大して示す図である。図2に示すように、センタリング計測時には、一方のカップリング3aに、他方のカップリング3bの径方向の振れ量(変位量)を計測するダイヤルゲージ8がマグネットスタンドを介して設けられる。また、図3に示すように、他方のカップリング3bの面外方向(軸方向)の振れ量を計測する際には、シリンダゲージ9が用いられる。
【0006】
一般的なセンタリング計測においては、各ロータ2a、2bに刻まれたロータ角度を基準にして、各ロータ2a、2bを手動により順にロータ角度0°、90°、180°、270°と回転させながら、ダイヤルゲージ8及びシリンダゲージ9により計測を行う。
【0007】
より具体的には、まず、両ロータ2a、2bをロータ角度0°が真上となるようにして、ダイヤルゲージ8及びシリンダゲージ9による計測値を取得する。次に、一方のロータ2aを90°回転させてロータ角度90°が真上となるようにし、その後、他方のロータ2bも90°回転させてロータ角度90°が真上となるようにして、ダイヤルゲージ8及びシリンダゲージ9による計測値を取得する。
【0008】
続いて、一方のロータ2aを更に90°回転させてロータ角度180°が真上となるようにし、その後、他方のロータ2bも更に90°回転させてロータ角度180°が真上となるようにして、ダイヤルゲージ8及びシリンダゲージ9による計測値を取得する。そして、一方のロータ2aを更に90°回転させてロータ角度270°が真上となるようにし、その後、他方のロータ2bも90°回転させてロータ角度270°が真上となるようにして、ダイヤルゲージ8及びシリンダゲージ9による計測値を取得する。
【0009】
最後に、一方のロータ2aを更に90°回転させて再びロータ角度0°が真上となるようにし、その後、他方のロータ2bも90°回転させて再びロータ角度0°が真上となるようにして、ダイヤルゲージ8及びシリンダゲージ9による計測値を取得する。最後の両ロータ2a、2bがロータ角度0°のときの計測値が、最初の両ロータ2a、2bがロータ角度0°のときの計測値に戻っていることを確認することで、データの再現性を確認する。
【0010】
カップリング3間の上下方向における芯差Xは、上下方向(例えば、ロータ角度0°が真上となる場合とロータ角度180°が真上となる場合)でのダイヤルゲージ8の計測値の差の1/2の値から算出することができる。カップリング3間の左右方向における芯差Xは、左右方向(例えば、ロータ角度90°が真上となる場合とロータ角度270°が真上となる場合)でのダイヤルゲージ8の計測値の差の1/2の値から算出することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
1か月前
株式会社東芝
電源回路
11日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
17日前
株式会社東芝
水処理装置
5日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
11日前
株式会社東芝
半導体装置
11日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
17日前
株式会社東芝
ガス遮断器
4日前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
磁気記録装置
4日前
株式会社東芝
空調制御装置
17日前
株式会社東芝
ディスク装置
4日前
株式会社東芝
ディスク装置
4日前
株式会社東芝
伝送システム
4日前
株式会社東芝
ディスク装置
24日前
株式会社東芝
モータ駆動装置
11日前
株式会社東芝
原子炉用制御棒
17日前
株式会社東芝
一括保護システム
17日前
株式会社東芝
組電池及び電池盤
17日前
株式会社東芝
半導体モジュール
21日前
株式会社東芝
投込式水位伝送器
1か月前
株式会社東芝
電力変換システム
10日前
株式会社東芝
系統安定化システム
4日前
株式会社東芝
粒子線照射システム
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ