TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011518
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023113688
出願日
2023-07-11
発明の名称
制御方法、プログラム及び移動体
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20250117BHJP(制御;調整)
要約
【課題】障害物を適切に回避する。
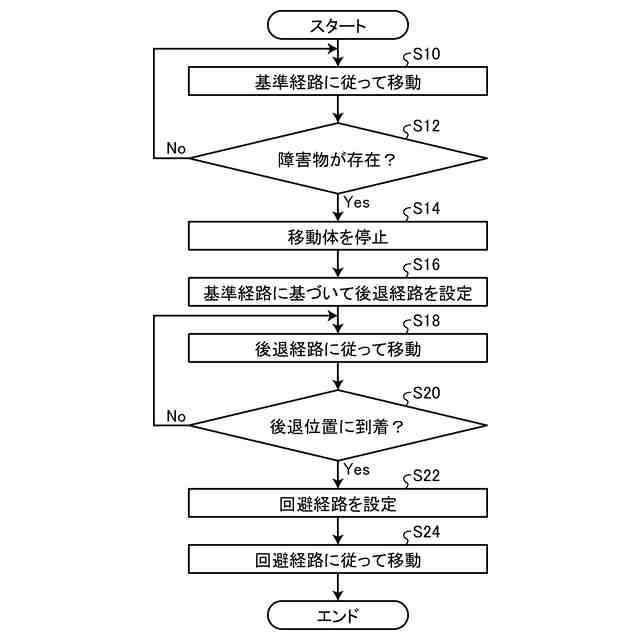
【解決手段】制御方法は、自動で移動する移動体の制御方法であって、基準経路に従って移動体を移動させるステップと、移動体が前記基準経路に従って移動している際に、移動体に設けられたセンサに、移動体の進行方向である第1方向側に位置する障害物を検出させるステップと、第1方向側に障害物が存在する場合に、移動体を停止させるステップと、基準経路に基づいて、第1方向とは反対の第2方向に戻る後退経路を設定するステップと、停止した移動体を、後退経路に従って移動させるステップと、を含む。
【選択図】図10
特許請求の範囲
【請求項1】
自動で移動する移動体の制御方法であって、
基準経路に従って移動体を移動させるステップと、
前記移動体が前記基準経路に従って移動している際に、前記移動体に設けられたセンサに、前記移動体の進行方向である第1方向側に位置する障害物を検出させるステップと、
前記第1方向側に障害物が存在する場合に、前記移動体を停止させるステップと、
前記基準経路に基づいて、前記第1方向とは反対の第2方向に戻る後退経路を設定するステップと、
停止した前記移動体を、前記後退経路に従って移動させるステップと、
を含む、
制御方法。
続きを表示(約 1,500 文字)
【請求項2】
前記後退経路を設定するステップにおいては、前記基準経路に沿って前記第2方向に向かう経路を、前記後退経路として設定する、請求項1に記載の制御方法。
【請求項3】
前記後退経路を設定するステップにおいては、前記基準経路に従って前記移動体が実際に移動した移動軌跡に沿って、前記第2方向に向かう経路を、前記後退経路として設定する、請求項1に記載の制御方法。
【請求項4】
前記障害物を検出した際の前記移動体の位置と、前記障害物の位置とが、所定の関係を満たす場合に、前記移動体を停止させ、かつ、前記移動体を前記後退経路に従って移動させる、請求項1から請求項3のいずれか1項に記載の制御方法。
【請求項5】
前記移動体を前記後退経路に従って移動させるステップにおいては、前記移動体を所定の後退位置まで移動させ、
前記障害物の位置に基づいて、前記後退位置から前記障害物を回避しつつ前記第1方向に向かう回避経路を設定するステップと、
前記後退位置まで移動した前記移動体を、前記回避経路に従って移動させるステップと、
を更に含む、請求項1から請求項3のいずれか1項に記載の制御方法。
【請求項6】
前記後退経路を設定するステップにおいては、前記障害物を検出した際の前記移動体の位置である検出位置に対応する位置、前記検出位置と前記障害物の位置との間の位置、又は、前記検出位置よりも前記障害物から離れた位置を、前記後退位置として設定する、請求項5に記載の制御方法。
【請求項7】
前記回避経路に従って移動した第1移動体とは別の第2移動体が、前記障害物から所定距離範囲内を通る際には、前記第1移動体の前記回避経路に基づいて、前記第2移動体の回避経路を設定するステップと、
前記第2移動体を、停止及び後退させることなく、前記第2移動体の回避経路に従って移動させるステップと、
を更に含む、請求項5に記載の制御方法。
【請求項8】
自動で移動する移動体の制御方法をコンピュータに実行させるプログラムであって、
基準経路に従って移動体を移動させるステップと、
前記移動体が前記基準経路に従って移動している際に、前記移動体に設けられたセンサに、前記移動体の進行方向である第1方向側に位置する障害物を検出させるステップと、
前記第1方向側に障害物が存在する場合に、前記移動体を停止させるステップと、
前記基準経路に基づいて、前記第1方向とは反対の第2方向に戻る後退経路を設定するステップと、
停止した前記移動体を、前記後退経路に従って移動させるステップと、
を、コンピュータに実行させる、
プログラム。
【請求項9】
自動で移動する移動体であって、
基準経路に従って前記移動体を移動させる移動制御部と、
前記移動体が前記基準経路に従って移動している際に、前記移動体に設けられたセンサに、前記移動体の進行方向である第1方向側に位置する障害物を検出させる検出制御部と、
前記基準経路に基づいて設定された、前記第1方向とは反対の第2方向に戻る後退経路を取得する後退経路取得部と、
を含み、
前記移動制御部は、
前記第1方向側に障害物が存在する場合に、前記移動体を停止させ、
停止した前記移動体を、前記後退経路に従って移動させる、
移動体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御方法、プログラム及び移動体に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
周囲を検出するセンサを備えて自動で移動する移動体が知られている。例えば特許文献1には、障害物を検出し、障害物の検出結果に基づき、障害物の前面の位置及び姿勢を特定して、その特定結果に基づき、障害物を回避する回避パスを生成する旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-141380号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、障害物を回避するように移動体を制御するには、改善の余地がある。
【0005】
本開示は、上述した課題を解決するものであり、障害物を適切に回避可能な制御方法、プログラム及び移動体を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る制御方法は、自動で移動する移動体の制御方法であって、基準経路に従って移動体を移動させるステップと、前記移動体が前記基準経路に従って移動している際に、前記移動体に設けられたセンサに、前記移動体の進行方向である第1方向側に位置する障害物を検出させるステップと、前記第1方向側に障害物が存在する場合に、前記移動体を停止させるステップと、前記基準経路に基づいて、前記第1方向とは反対の第2方向に戻る後退経路を設定するステップと、停止した前記移動体を、前記後退経路に従って移動させるステップと、を含む。
【0007】
本開示に係るプログラムは、自動で移動する移動体の制御方法をコンピュータに実行させるプログラムであって、基準経路に従って移動体を移動させるステップと、前記移動体が前記基準経路に従って移動している際に、前記移動体に設けられたセンサに、前記移動体の進行方向である第1方向側に位置する障害物を検出させるステップと、前記第1方向側に障害物が存在する場合に、前記移動体を停止させるステップと、前記基準経路に基づいて、前記第1方向とは反対の第2方向に戻る後退経路を設定するステップと、停止した前記移動体を、前記後退経路に従って移動させるステップと、を、コンピュータに実行させる。
【0008】
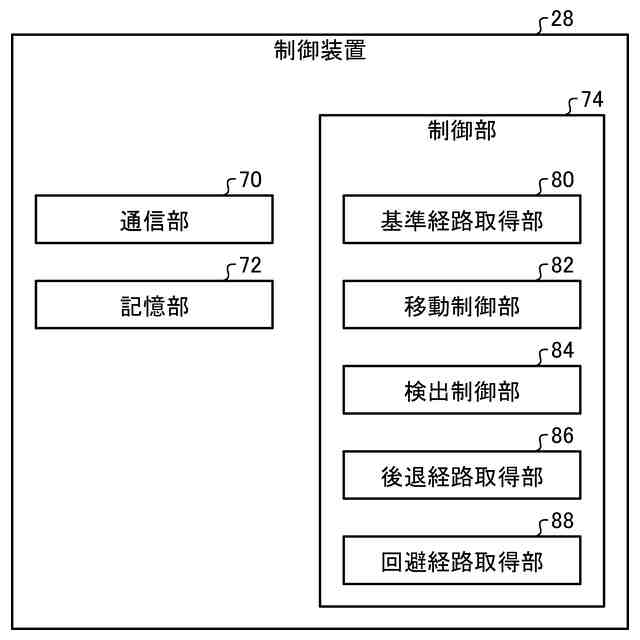
本開示に係る移動体は、自動で移動する移動体であって、基準経路に従って前記移動体を移動させる移動制御部と、前記移動体が前記基準経路に従って移動している際に、前記移動体に設けられたセンサに、前記移動体の進行方向である第1方向側に位置する障害物を検出させる検出制御部と、前記基準経路に基づいて設定された、前記第1方向とは反対の第2方向に戻る後退経路を取得する後退経路取得部と、を含み、前記移動制御部は、前記第1方向側に障害物が存在する場合に、前記移動体を停止させ、停止した前記移動体を、前記後退経路に従って移動させる。
【発明の効果】
【0009】
本開示によれば、障害物を適切に回避できる。
【図面の簡単な説明】
【0010】
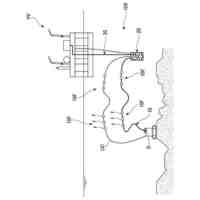
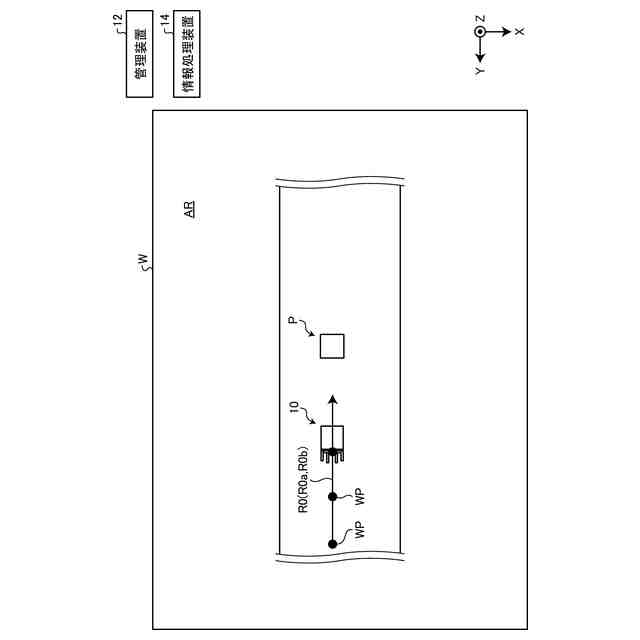
図1は、本実施形態に係る移動制御システムの模式図である。
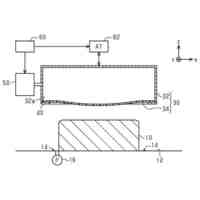
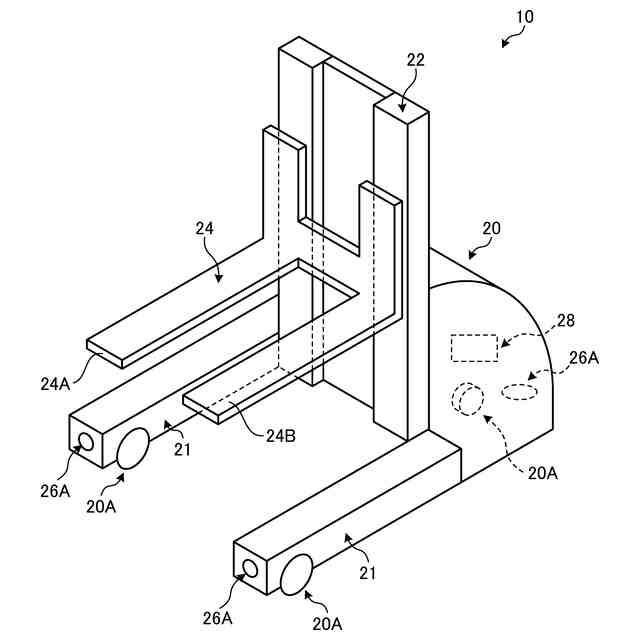
図2は、移動体の構成の模式図である。
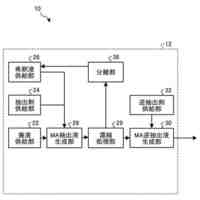
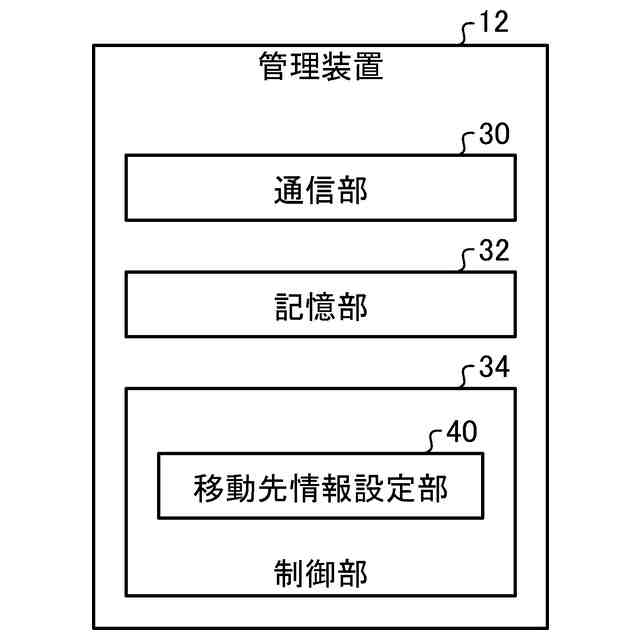
図3は、管理装置の模式的なブロック図である。
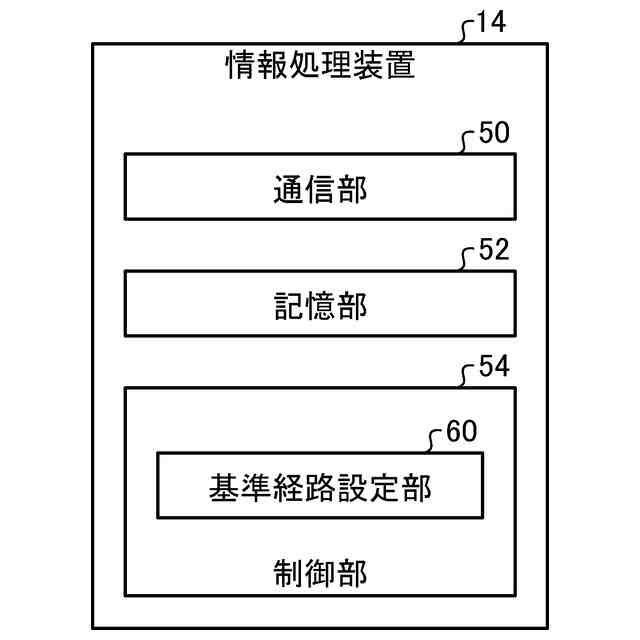
図4は、情報処理装置の模式的なブロック図である。
図5は、移動体の制御装置の模式的なブロック図である。
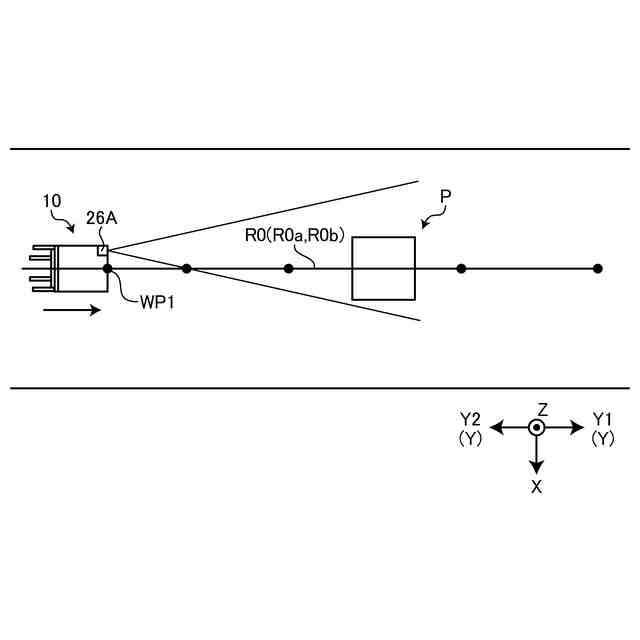
図6は、障害物の検出の一例を説明する模式図である。
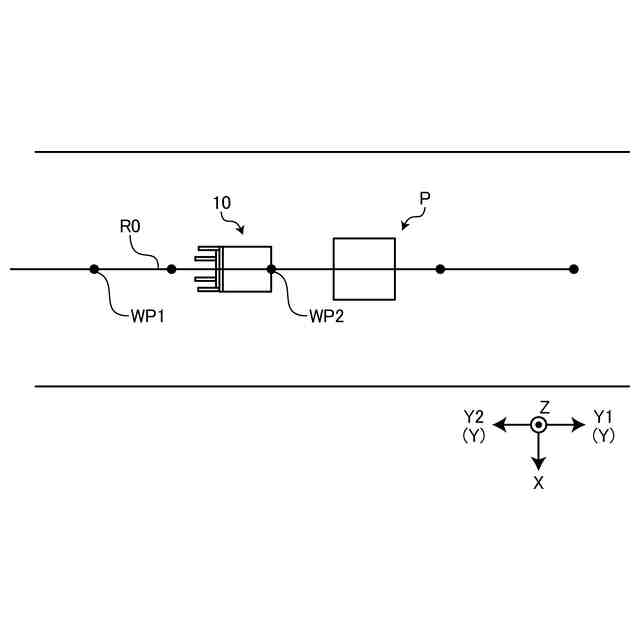
図7は、移動体の停止の一例を説明する模式図である。
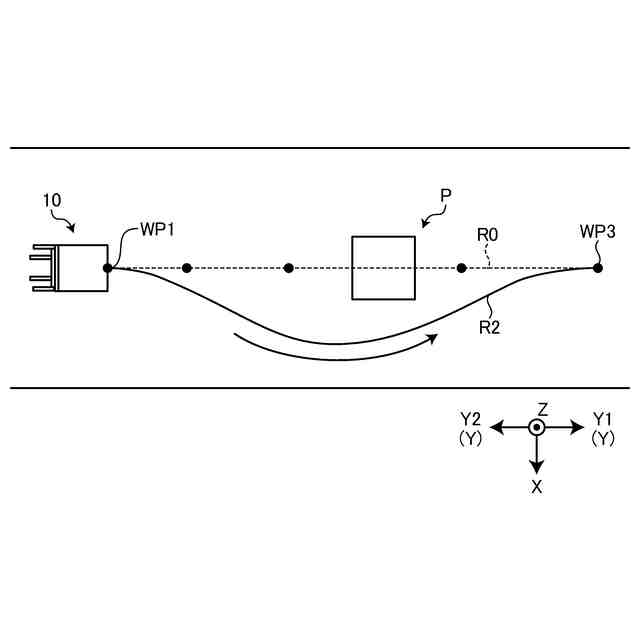
図8は、後退経路の一例を説明する模式図である。
図9は、回避経路の一例を説明する模式図である。
図10は、移動体の制御フローを説明するフローチャートである。
図11は、サブゴールの設定方法の例を示す模式図である。
図12は、サブゴールの設定方法の例を示す模式図である。
図13は、サブゴールの設定方法の例を示す模式図である。
図14は、参照経路の設定の一例を示す模式図である。
図15は、回避経路の設定の一例を示す模式図である。
図16は、非干渉領域の設定を説明するための模式図である。
図17は、非干渉領域の設定を説明するための模式図である。
図18は、非干渉領域の設定の他の例を説明する模式図である。
図19は、解析用点群の抽出方法の例を示す模式図である。
図20は、後退位置の例を説明する模式図である。
図21は、後退位置の例を説明する模式図である。
図22は、他の移動体の回避経路を説明する模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
コイル、及び回転電機
今日
三菱重工業株式会社
コイル、及び回転電機
今日
三菱重工業株式会社
液化装置及び液化方法
今日
三菱重工業株式会社
液化装置及び液化方法
今日
三菱重工業株式会社
熱交換器および高温ガス炉システム
今日
三菱重工業株式会社
成形品の製造方法、および成形品の製造装置
今日
三菱重工業株式会社
成形品の製造方法、および成形品の製造装置
今日
三菱重工業株式会社
製造モデル作成装置、製造モデル作成方法及びプログラム
今日
三菱重工業株式会社
サイレンサ
今日
三菱重工業株式会社
高レベル放射性物質処理システム及び高レベル放射性物質処理方法
今日
三菱重工業株式会社
ガスタービン制御装置、ガスタービン制御方法、及び、ガスタービン制御プログラム
今日
日鉄エンジニアリング株式会社
接続構造、搬送中継体、可撓性線状体の設置方法、及び可撓性線状体の交換方法
今日
個人
方向検出器
2か月前
ugo株式会社
移動体
2か月前
村田機械株式会社
産業機械
7日前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
移動体
1か月前
神港テクノス株式会社
制御装置
1か月前
トヨタ自動車株式会社
自律移動体
2か月前
トヨタ自動車株式会社
自律移動体
7日前
トヨタ自動車株式会社
搬送ロボット
2か月前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
7日前
株式会社フジキン
流体制御装置
1か月前
アズビル株式会社
パラメータ調整装置
16日前
株式会社明電舎
車両
7日前
トヨタ自動車株式会社
ロボットシステム
15日前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
位置推定システム
2か月前
トヨタ自動車株式会社
ロボットシステム
7日前
株式会社FUJI
工作機械の操作システム
2か月前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
1か月前
キヤノン株式会社
情報処理装置
15日前
ローム株式会社
電源回路
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ