TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011296
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2024184358,2023024660
出願日
2024-10-18,2015-07-22
発明の名称
磁束機械
出願人
クリアウォーター ホールディングス,リミテッド
代理人
個人
,
個人
,
個人
主分類
H02K
16/02 20060101AFI20250116BHJP(電力の発電,変換,配電)
要約
【課題】より高い電力密度を可能にする電磁回転磁束機械を提供する。
【解決手段】磁束機械10は、複数のコイルアセンブリと、中心軸5の周りで互いに非常に近接し、かつ円形に配置された複数の磁石セットとを有する。コイルアセンブリおよび磁石セットのいずれか一方は、中心軸と位置合わせされた少なくとも1つのシャフトによって支持されており、コイルアセンブリおよび磁石セットのいずれか一方は、コイルアセンブリ内に電流が存在する場合に中心軸の周りでの回転運動を行う。磁石セットの磁束は軸方向および半径方向に導かれ、機械の回転は磁束方向に直交している。各磁石セット内の複数の磁石は、磁束機械が電気モータ、発電機または同時に両方として動作することができるように、複数の同軸上に位置合わせされたシャフトのうちの1つまたは別の1つによって支持されている。
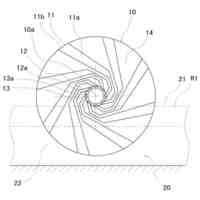
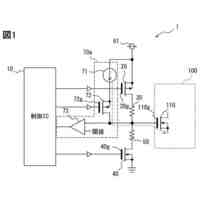
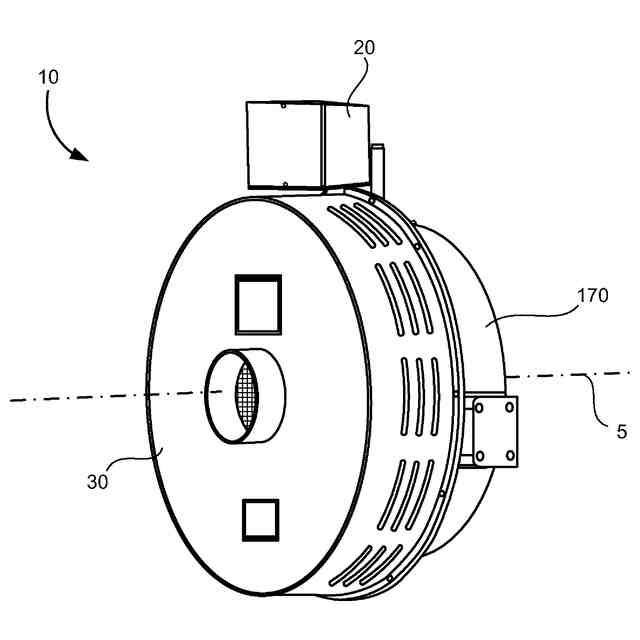
【選択図】図1
特許請求の範囲
【請求項1】
ステータ、1つ以上のロータ、複数のコイルアセンブリ、及び複数の磁石のセットを備える磁束機械であって、
前記1つ以上のロータの各々が、軸と、半径方向に前記軸から延在する複数のスポークとを備え、
前記複数のコイルアセンブリが、前記ステータと結合しており、また
前記複数の磁石のセットが、前記1つ以上のロータの前記複数のスポークと結合し、前記複数の磁石のセットの各々が、第1の磁石と第2の磁石を少なくとも備え、
前記第1の磁石は前記複数のスポークと少なくとも結合し、かつ前記複数のコイルアセンブリに向かって直交する磁束を第1の方向へ配向するように構成され、前記第2の磁石は前記複数のスポークと少なくとも結合し、かつ前記複数のコイルアセンブリに向かって直交する磁束を第2の方向へ配向するように構成され、それによって、前記複数のスポークの各々が、(i)前記複数の磁石のセットのうち少なくとも1つの前記第1の磁石と少なくとも結合し、かつ(ii)前記複数の磁石のセットのうち少なくとも1つの前記第2の磁石と少なくとも結合し、
前記1つ以上のロータのうち各々のロータの前記複数のスポークが前記各々のロータの前記軸の周囲360度にわたって配置される
磁束機械。
続きを表示(約 860 文字)
【請求項2】
前記複数のスポークが、前記軸の周囲360度にわたって配置される、請求項1に記載の磁束機械。
【請求項3】
前記複数のスポークが、各々、前記複数の磁石のセットのうちの1つの前記第1の磁石に少なくとも結合される、請求項1に記載の磁束機械。
【請求項4】
前記複数のスポークが、前記複数の磁石のセットのうちの第1の磁石のセットの少なくとも前記第1の磁石と、及び、前記複数の磁石のセットのうちの第2の磁石のセットの少なくとも前記第1の磁石と、に結合されている、請求項1に記載の磁束機械。
【請求項5】
前記複数の磁石のセットの各々の前記第1の磁石が、前記複数のスポークのうち少なくとも2つに結合されている、請求項1に記載の磁束機械。
【請求項6】
前記複数のスポークの各々のスポークが、前記複数のコイルアセンブリのうちの1つのコイルアセンブリに対応する、請求項1に記載の磁束機械。
【請求項7】
少なくとも1つの磁石が、前記複数のスポークのうちそれぞれのスポークに結合し、かつ
前記それぞれのスポークに対応する前記複数のコイルアセンブリのうちの前記1つのコイルアセンブリに隣接して配置されている、請求項6に記載の磁束機械。
【請求項8】
前記複数のコイルアセンブリの各々が、前記複数のスポークのうちの1つのスポークに隣接して配置される、請求項6に記載の磁束機械。
【請求項9】
前記複数のスポークの各々が、前記複数のコイルアセンブリのうちの少なくとも2つのコイルアセンブリに対応している、請求項1に記載の磁束機械。
【請求項10】
少なくとも1つの磁石が、前記複数のスポークの各々に結合しており、また、前記複数のコイルアセンブリのうちの前記少なくとも2つのコイルアセンブリに隣接して配置される、請求項9に記載の磁束機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、回転電磁モータおよび発電機に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
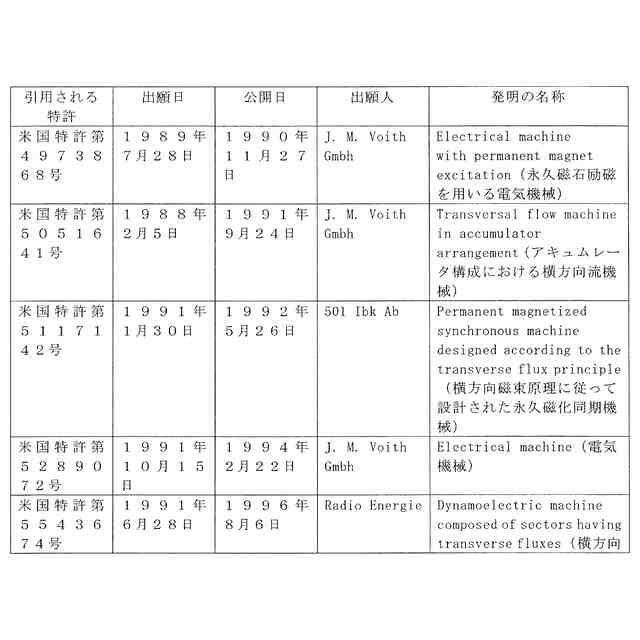
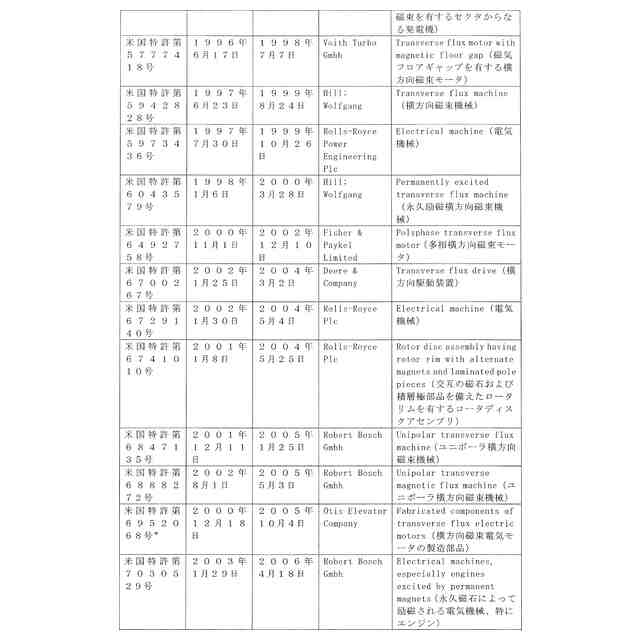
磁石横方向磁束機械は、コイル内の電流に対して垂直(横方向)に磁束を導き、長手方向の磁束を有する標準的なブラシレス機械よりも高いトルク密度を生成することができる。そのような機械は高い電力密度を有し、モータおよび発電機の両方として使用することができる。トルクは一定のステータ(固定子)電流において極数と共に増加する。横方向磁束機械では極数が大きいため、ステータ巻線における電流の周波数は高いが、シャフト速度は低い。そのような機械は、昔からステータおよびロータ(回転子)部品の製作および組み立てを難しくしている3次元磁気回路を有する。先行技術の磁気回路の製造方法は、個々のU字型の磁気回路の形成を必要とする。例えば、U字型の磁気回路は、互いに積み重ねられた複数の個々のU字型の積層体で構成されていてもよい。その上、そのような機械の組み立ては、各U字型の磁気回路の正しい配置、位置合わせおよび離間を必要とする。先行技術で知られている別の方法は、それぞれが一連のL字型突起物として全磁気回路の半分を有する2つの3D積層体を構築することである。コイルの周りで互いに接合させると、磁気回路はU字型に完成する。この方法は複雑な3次元形状を有する積層体の構築を必要とし、磁気回路を適切に形成するために積層体の正確な回転位置合わせを必要とする。本明細書に記載されている本磁束機械は製造および組み立てが単純であり、小型であり、かつ他の新規かつ非常に有利な態様を有する。本開示に関連する先行技術は以下の表に含まれており、参照により本明細書に組み込まれる。
TIFF
2025011296000002.tif
143
162
TIFF
2025011296000003.tif
229
162
TIFF
2025011296000004.tif
229
162
TIFF
2025011296000005.tif
229
162
TIFF
2025011296000006.tif
116
162
【0003】
図面は、先行技術に対して製造および操作上の利点を有する新規な電磁回転磁束機械10を示す。例えば、磁束密度は比較的高く、1つの極当たりの起磁力を低下させることなく極数を増加させることができ、より高い電力密度を可能にする。さらなる利点としては、高いトルク/重量比、高い電力/重量比および比較的低い銅損により効率向上を可能にする比較的短い電流経路を有する多数の極が挙げられる。
【0004】
4つ以上の方向から導かれた磁束がコイルアセンブリに結合されるコイルおよび磁石の構成が開発されてきた。例えば、磁束をコイルの両側から半径方向に導くために極が向かい合った状態で配向された2つの磁石と、磁束をコイルの両側から軸方向に導くために極が軸方向を向いた状態で配向された2つのさらなる磁石が存在してもよい。さらに、巻線およびそれらの巻線内の電流が磁束機械のロータの運動の確立された円周方向を指すベクトルに垂直な平面を流れるように、コイルを配向させてもよい。
【0005】
このように、磁石はコイルの異なる側面に隣接していてもよいが、全ての磁束回路は付加的に結合している。
【0006】
本明細書に記載されているように独立したロータおよびシャフトに装着された磁石(電磁石または永久磁石あるいはその2つの組み合わせ)を用いれば、それらを独立して異なる周波数で、かつ/または独立してモータおよび発電機として同時に動作させることできる。これらの技術革新は、本機械の回転軸に垂直な平面に位置するコイルの向きを考慮すれば可能である。磁石およびコイルをその間の空隙を最小にして密結合した状態で回転させることにより、磁石とコイルとの間に相対運動が生じる。
【0007】
例えば添付の図面の図の中に、ここに説明されている機械の実施形態が一例として示されている。図面では、同様の参照符号は同様の要素を示す。
【図面の簡単な説明】
【0008】
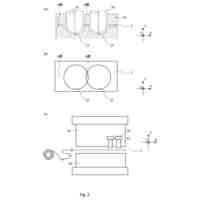
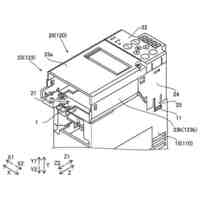
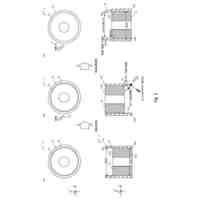
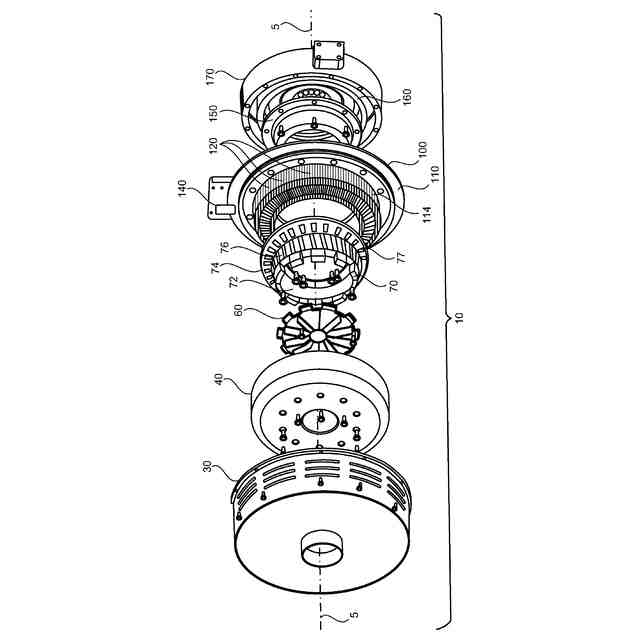
以下の詳細な説明に係る磁束機械の斜視図である。
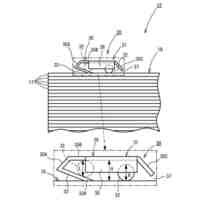
その斜視拡大図である。
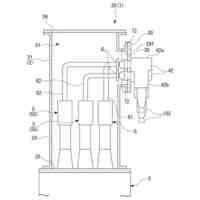
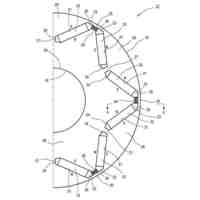
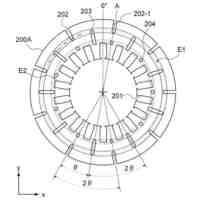
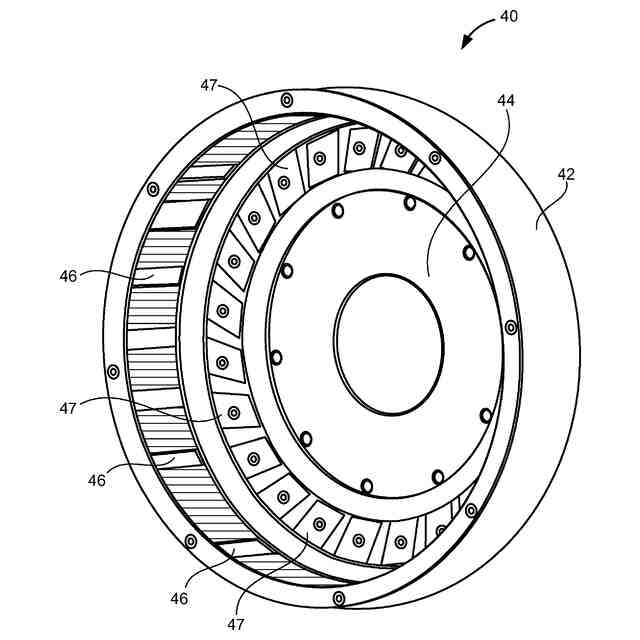
その一実施形態の外側ロータ-磁石アセンブリの斜視図である。
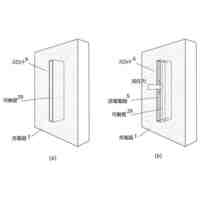
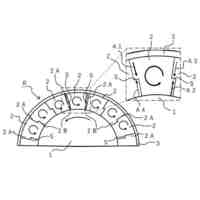
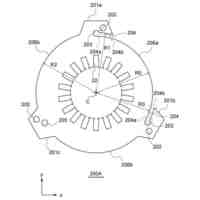
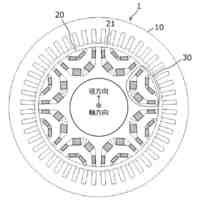
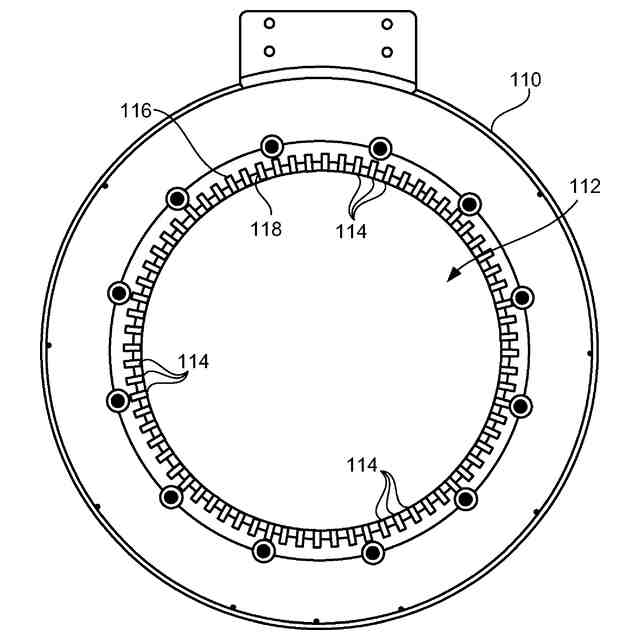
その一実施形態のステータ板の立面図である。
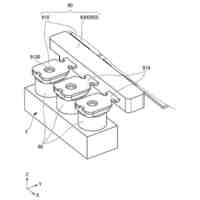
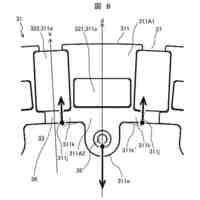
例示的なコイルアセンブリおよびその磁石の斜視図である。
前記コイルアセンブリ、磁石、シャフトを有する支持フレームの構成の例示的な概念図である。
前記コイルアセンブリ、磁石、シャフトを有する支持フレームの構成の例示的な概念図である。
前記コイルアセンブリ、磁石、シャフトを有する支持フレームの構成の例示的な概念図である。
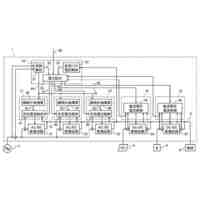
図6~図8と同様にさらなる構成の例示的な機械的概略図である。
【発明を実施するための形態】
【0009】
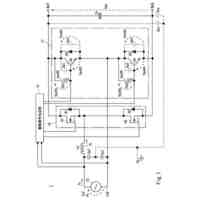
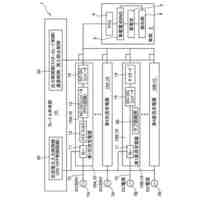
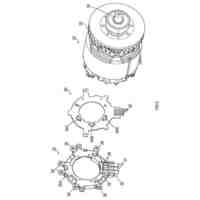
図1は、機械10がほぼ円形状であり、かつ囲い板30とはずみ車ハウジング170との間は軸方向に比較的短くてもよく、それにより空間および重量が節約されていることを示す。機械10への電気的接続は、標準的な接続ボックス20を介してなされてもよく、機械的係合は、図6~図9に示す中心軸5に位置合わせされた1つ以上の同軸シャフトを介してなされてもよい。
【0010】
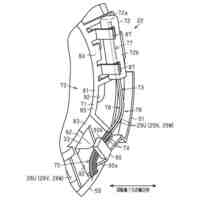
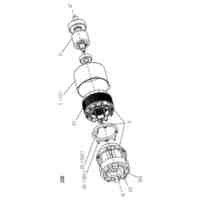
図2は、実施形態に係る機械10のいくつかの部品およびサブアセンブリを示し、それらの相対的軸方向位置を示す。図2を左から右に移動して見ると、囲い板30、外側ロータ-磁石アセンブリ40、ファン60、内側ロータ-磁石アセンブリ70、コイルアセンブリ120を含むステータアセンブリ100、ロータハブ150、はずみ車160およびはずみ車ハウジング170が示されている。これらの部品は、機械10の回転中心でもある一般的な軸5の周りに位置合わせされている。実施形態では、外側ロータ-磁石アセンブリ40、ファン60、内側ロータ-磁石アセンブリ70、ロータハブ150およびはずみ車160は機械的に互いに接合されていてもよく、従って一緒に回転してもよい。他の実施形態では、これらの要素および他の要素のいくつかは、後で説明および図示するように、同軸シャフトの周りを独立して回転するように構成されていてもよい。実施形態では、囲い板30、ステータアセンブリ100およびはずみ車ハウジング170は回転しなくてもよく、機械的に互いに接合されていてもよく、ステータとして適所に固定されていてもよい。他の実施形態では、ステータアセンブリ100は、一般にスリップリングモータにおいて見られるような標準的な回転式電気的インタフェースを介して接続された巻線の各位相と共に中心シャフトの周りを回転するように装着されていてもよい。従って、アセンブリ100が機械10のロータとして機能し、外側ロータ-磁石アセンブリ40および内側ロータ-磁石アセンブリ70が機械10のステータとして機能してもよい。当業者であればこの単純な改造方法が分かるであろう。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
静電モータ
11日前
株式会社ExH
接触ユニット
15日前
株式会社東光高岳
開閉装置
4日前
株式会社アイシン
車両用駆動装置
11日前
竹内工業株式会社
配線ダクト
5日前
トヨタ自動車株式会社
積層コア
11日前
株式会社豊田自動織機
回転電機のロータ
11日前
株式会社豊田自動織機
回転電機のロータ
18日前
日産自動車株式会社
ロータ
11日前
日産自動車株式会社
ロータ
5日前
株式会社高砂製作所
力率改善回路
15日前
アズビル株式会社
配線確認システム
11日前
住友電装株式会社
電気接続箱
15日前
富士電機株式会社
電力変換装置
18日前
本田技研工業株式会社
回転電機
15日前
本田技研工業株式会社
回転電機
18日前
富士電機株式会社
電力変換装置
5日前
株式会社ダイヘン
電力システム
15日前
株式会社ダイヘン
電力システム
15日前
ダイハツ工業株式会社
クレードル装置
18日前
トヨタ自動車株式会社
電動車両
11日前
株式会社豊田自動織機
回転電機
15日前
株式会社ミツバ
電動モータ
5日前
個人
電力管理装置及び電力管理システム
12日前
株式会社日立製作所
回転電機
11日前
株式会社デンソー
駆動回路
15日前
株式会社豊田自動織機
電動圧縮機
11日前
矢崎総業株式会社
プロテクタ
18日前
株式会社マツイ
一軸アクチュエータ
18日前
株式会社デンソー
電子制御装置
11日前
トヨタ自動車株式会社
モータ装置の製造方法
11日前
株式会社日立製作所
回転電機
11日前
ゴイク電池株式会社
容量計測機能付き充電器
18日前
株式会社日立製作所
電力変換装置
11日前
株式会社マキタ
電動作業機
11日前
ニデック株式会社
モータ
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ