TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025009891
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2024091102
出願日
2024-06-05
発明の名称
デジタルツインを使用してシステムを制御するためのデバイスおよび方法
出願人
三菱電機株式会社
代理人
弁理士法人深見特許事務所
主分類
G05B
13/04 20060101AFI20250109BHJP(制御;調整)
要約
【課題】本開示は、タスクを実行するためにシステムの動作を制御するためのデバイスおよび方法を開示する
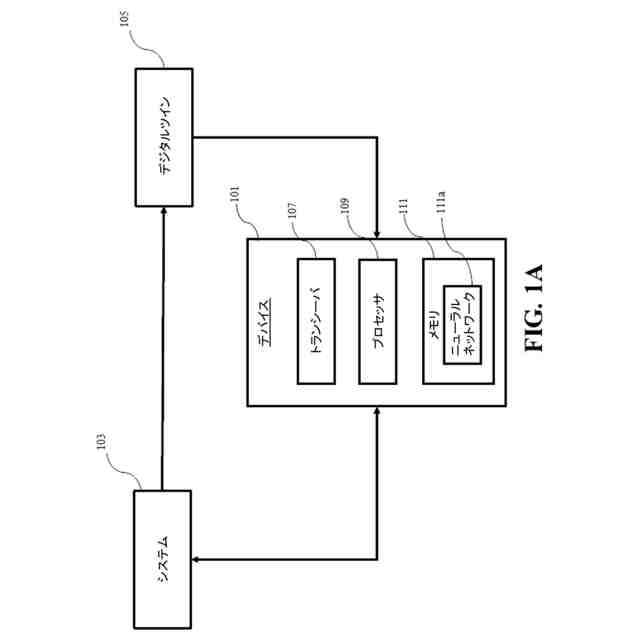
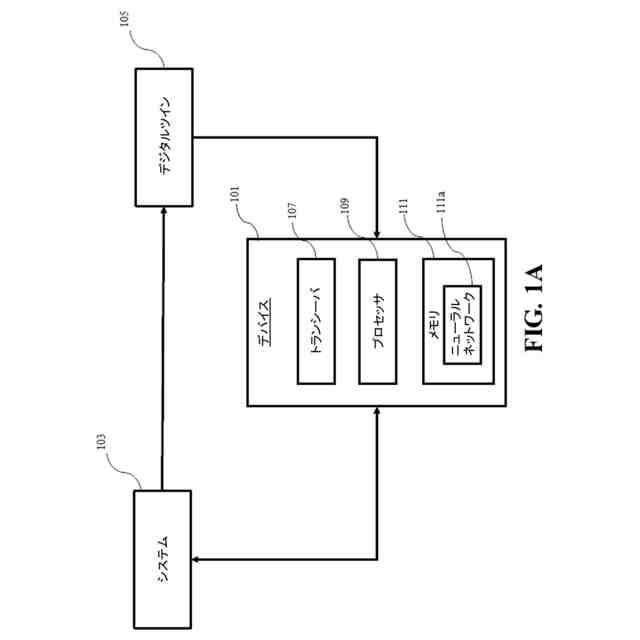
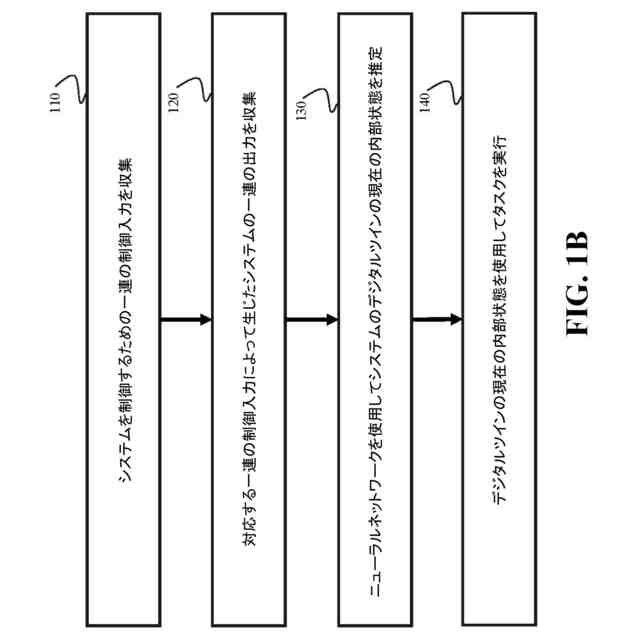
【解決手段】システムは、システムの動作を同時にシミュレートするように構成されたデジタルツインに通信可能に結合される。この方法は、タスクに従ってシステムの状態を変化させるようにシステムを制御するための一連の制御入力を収集することを含む。この方法は、対応する一連の制御入力によって生じたシステムの一連の出力を収集することをさらに含む。この方法は、デジタルツインの現在の内部状態を、一連の制御入力を一連の出力にマッピングするデジタルツインの一連の内部状態を推定するように訓練されたニューラルネットワークを使用して、推定することをさらに含む。この方法は、デジタルツインの現在の内部状態を使用してタスクを実行することをさらに含む。
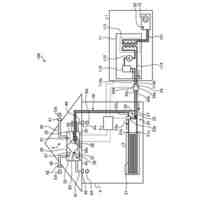
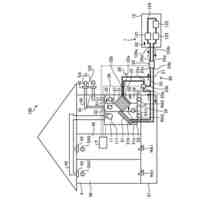
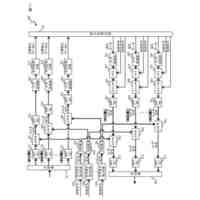
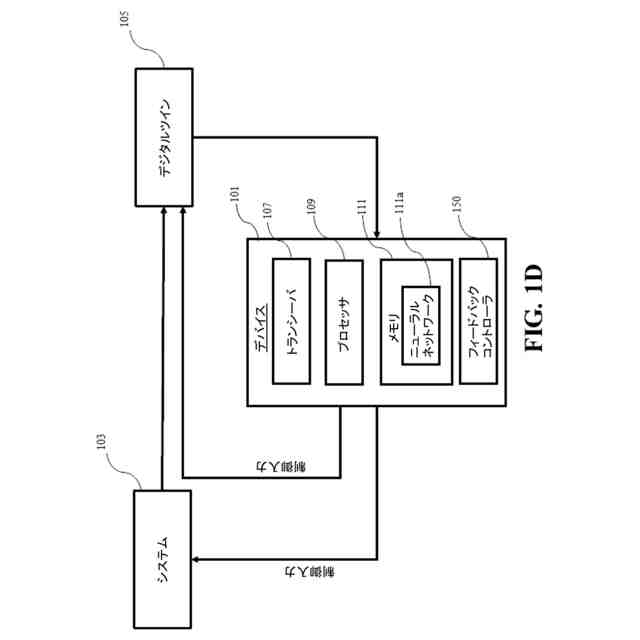
【選択図】図1A
特許請求の範囲
【請求項1】
タスクを実行するためにシステムの動作を制御するためのデバイスであって、前記システムは、前記システムの動作を同時にシミュレートするように構成されたデジタルツインに通信可能に結合され、前記システムおよび前記デジタルツインは同時に動作し、前記デバイスは、プロセッサと、命令が格納されたメモリとを備え、前記命令は、前記プロセッサによって実行されると、前記デバイスに、
前記タスクに従って前記システムの状態を変化させるように前記システムを制御するための一連の制御入力を収集することと、
対応する前記一連の制御入力によって生じた前記システムの一連の出力を収集することと、
前記デジタルツインの現在の内部状態を、前記一連の制御入力を前記一連の出力にマッピングする前記デジタルツインの一連の内部状態を推定するように訓練されたニューラルネットワークを使用して、推定することと、
前記デジタルツインの前記現在の内部状態を使用して前記タスクを実行することとを、実行させる、デバイス。
続きを表示(約 1,400 文字)
【請求項2】
フィードバックコントローラをさらに備え、前記フィードバックコントローラは、
前記デジタルツインの前記現在の内部状態に基づいて、前記システムを制御するための前記一連の制御入力のうちのある現在の制御入力を決定し、
前記タスクを実行するために、決定した前記制御入力に基づいて前記システムを制御するように、構成される、請求項1に記載のデバイス。
【請求項3】
前記フィードバックコントローラはさらに、前記現在の制御入力に基づいて、同時に、前記システムの状態を更新するように前記システムを制御し前記デジタルツインの内部状態を更新するように前記デジタルツインを制御するように構成される、請求項2に記載のデバイス。
【請求項4】
前記フィードバックコントローラは、比例積分微分(PID)コントローラ、極値探索制御、およびモデル予測制御(MPC)のうちの1つまたは組み合わせを含む、請求項2に記載のデバイス。
【請求項5】
前記プロセッサはさらに、前記システムの測定されたデータおよび前記システムの1つ以上の固有の特性に基づいて、前記デジタルツインの内部状態をオンラインで推定するように構成される、請求項1に記載のデバイス。
【請求項6】
前記ニューラルネットワークは、教師あり学習により、前記デジタルツインの内部状態の訓練シーケンスと前記デジタルツインの対応する出力の訓練シーケンスとを含む訓練データに基づいて、訓練される、請求項1に記載のデバイス。
【請求項7】
前記ニューラルネットワークは、前記デジタルツインの内部状態の符号化の、前記デジタルツインの内部状態と前記システムの出力との組み合わせを示す復号への動的伝播に適合させた潜在空間を有するオートエンコーダである、請求項1に記載のデバイス。
【請求項8】
前記プロセッサはさらに、前記システムの前記一連の出力と整合するように前記オートエンコーダによって変換された予測ホライズン内の一連の内部状態を生成する最適化問題を解くように構成される、請求項7に記載のデバイス。
【請求項9】
前記オートエンコーダは、
潜在空間における現在の入力内部状態の現在の符号化を生成するように前記現在の入力内部状態を前記潜在空間に符号化するように構成されたエンコーダサブネットワークと、
前記潜在空間における前記内部状態の次の符号化を生成するように前記潜在空間における前記内部状態の前記現在の符号化を時間的に前方に伝播させるように構成された潜在サブネットワークと、
前記潜在空間における前記内部状態の前記次の符号化から前記デジタルツインの次の内部状態を復号するように構成された第1デコーダサブネットワークと、
前記潜在空間における前記内部状態の前記現在の符号化から前記システムの現在の出力を復号するように構成された第2デコーダサブネットワークとを含む、請求項7に記載のデバイス。
【請求項10】
前記プロセッサはさらに、前記潜在サブネットワークのパラメータの値によって形成された制御行列を含む線形制御法則を使用して前記システムを制御するように構成される、請求項9に記載のデバイス。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、概して制御システムに関し、より具体的にはデジタルツインを使用してシステムを制御するためのデバイスおよび方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
蒸気圧縮システムおよびロボット等のさまざまなシステムが、状態観測器を用いて制御される。状態観測器を設計するには、システムの力学の知識と、システムの力学を規定する数学モデルとが必要である。数学モデルがない場合、動作データはシステムから収集される。さらに、収集された動作データを利用することにより、モデル化されていない力学を、例としてニューラルネットワークまたはベイズ最適化を使用して学習し、その後、状態推定器利得を計算する。
【0003】
モデル化および数値計算の進歩がデジタルツインの出現につながった。デジタルツインは、システムの挙動を再現したものである。デジタルツインは、状態観測器の設計に使用することができる。しかしながら、状態観測器の設計にデジタルツインを使用するのは難しい。例として、デジタルツインは、通常、不透明にされた「ブラックボックス」であるモジュールで構成されており、不透明にされている理由として、プロプライエタリ情報の保護、コードの複雑さの低減、またはユーザインターフェイスおよび経験の改善等の理由が挙げられる。そのため、デジタルツインは、標準的なモデルベースの状態観測器の設計に使用できる単純なモデル構造を許容しない場合がある。さらに、デジタルツインシミュレーションは、デジタルツインの内部状態を使用するシステムと同じ出力を生成する。しかしながら、内部状態は、システムからオンラインで容易に入手することができない。
【0004】
それ故に、ブラックボックスシミュレーション環境(すなわちデジタルツイン)と統合することができ、かつ、システムを制御するためにそのような状態観測器を使用することができる、状態観測器を設計することが、依然として必要とされている。
【発明の概要】
【0005】
いくつかの実施形態の目的は、システムのデジタルツインの内部状態に基づいてこのシステムを制御するためのデバイスおよび方法を提供することである。また、いくつかの実施形態の目的は、システムの測定値を使用してこのシステムの内部状態を推定することである。加えて、いくつかの実施形態の目的は、一連の制御入力を一連の出力にマッピングするデジタルツインの一連の内部状態を推定するようにニューラルネットワークを訓練することである。
【0006】
フィードバックは、システムの出力が、回路またはループを形成する原因と結果の連鎖の一部を構成する入力として戻されるときに生じる。よって、システムはこのシステム自体にフィードバックすると言える。たとえば、状態フィードバック制御は、制御システム工学の分野で使用される制御技術であり、システムの状態(または測定可能なおよび/または推定されたサブセット)を使用して制御アクションを計算しシステムの挙動を調節することを含む。
【0007】
制御システムにおいて、「状態」は、任意のある時間におけるシステムの内部力学および挙動を記述する一組の変数を意味する。一組の変数は、位置、速度、加速度、温度、圧力、またはシステムを特徴付ける任意の他の測定可能な量を含む。状態フィードバック制御はフィードバックループを利用し、このループにおいて、システムの状態が、測定または推定され、所望の状態と比較され、差分(誤差として知られている)を使用して、システムに適用される制御信号を計算する。制御信号は、システムの力学に影響を与えることにより、システムを操縦して所望の状態にするように設計される。
【0008】
しかしながら、多くの産業システムおよびプロセスにおいて、システムの状態という概念は抽象的および/または複雑すぎて実用的ではない。たとえば、製造プロセス、産業機器の監視および制御、ならびに建築物内のエネルギー消費の最適化は、リアルタイムの制御用途で測定するには非実用的なあまりにも多くの状態変数に依存する。このような測定されない状態変数の例は、蒸気圧縮システムにおける圧力またはエンタルピーである。他の用途では、状態変数という概念の明確な定義すらない。たとえば、複雑な製造システムにおける独立したプロセス間の結合が製造システムの状態の形成に関与すると仮定することは妥当である。しかしながら、そのような結合を如何にして測定し定義するか、および/またはそもそもそのような結合が存在するか否かさえ、明らかでないことが多い。したがって、多くの実用用途において状態フィードバック制御は非実用的、または不可能でさえある。
【0009】
いくつかの実施形態は、デジタルツインをシステムの制御に使用することができる、という認識に基づいている。デジタルツインは、意図されたまたは実際の、現実世界の物理的な製品、システム、またはプロセス(物理的ツイン)の、デジタル表現であり、これは、シミュレーション、統合、試験、監視、および保守等の実用的な目的のための、事実上区別できない、物理的ツインのデジタル対応物として機能する。デジタルツインは、製造プロセスを最適化するため、産業機器を監視および制御するため、個別化医療のために患者の健康データを分析するため、建築物内のエネルギー消費を最適化するため、さらに都市計画のために都市全体をモデル化およびシミュレーションするためにも、使用することができる。
【0010】
一連の入力に対し、システムのデジタルツインは、システムがこの一連の入力に対して出力できるものと同一の一連の出力を生成する。言い換えると、デジタルツインの力学は、一連の入力と一連の出力との間のマッピングを提供する。しかしながら、デジタルツインにはそれ自身の力学がある。例として、デジタルツインの内部状態は、通常その物理的ツイン(すなわちシステム)の内部状態とは異なる。加えて、物理ツインとは異なり、デジタルツインの内部状態は、物理的な意味を持たずデジタルツインの設計者の目的に依存する場合がある。さらに、デジタルツインは、未知の構成要素を備えた複雑な内部力学モデルを有する場合があり、このことは、デジタルツインの力学が未知であることを意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
22日前
三菱電機株式会社
放電装置
2日前
三菱電機株式会社
発光装置
2日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
光通信装置
2日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
半導体装置
3日前
三菱電機株式会社
半導体装置
10日前
三菱電機株式会社
半導体装置
3日前
三菱電機株式会社
半導体製造装置
24日前
三菱電機株式会社
半導体製造装置
12日前
三菱電機株式会社
換気空調システム
18日前
三菱電機株式会社
半導体モジュール
9日前
三菱電機株式会社
冷凍サイクル装置
22日前
三菱電機株式会社
半導体モジュール
22日前
三菱電機株式会社
換気空調システム
18日前
三菱電機株式会社
換気空調システム
18日前
三菱電機株式会社
保護リレーシステム
9日前
三菱電機株式会社
移載装置及び吸着方法
19日前
三菱電機株式会社
室外機及び空気調和装置
24日前
三菱電機株式会社
半導体チップ及び半導体装置
19日前
三菱電機株式会社
拡管工具および管の拡管方法
9日前
三菱電機株式会社
トルク締め個所検出システム
22日前
三菱電機株式会社
送風システム及び空調システム
3日前
三菱電機株式会社
送風システム及び空調システム
3日前
三菱電機株式会社
ベーパーチャンバー及び冷却装置
17日前
三菱電機株式会社
バーチャルオフィス支援システム
10日前
三菱電機株式会社
レーダ装置および物体位置検出方法
2日前
三菱電機株式会社
漏油画像生成装置および漏油検知装置
19日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
12日前
三菱電機株式会社
マルチトーンレーダおよび送受信方法
12日前
三菱電機株式会社
導波管アンテナおよびレーダシステム
2日前
三菱電機株式会社
移動体制御装置および移動体制御方法
2日前
三菱電機株式会社
アンテナモジュールおよびアンテナ装置
19日前
三菱電機株式会社
半導体装置および半導体装置の製造方法
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ