TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025004522
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023104254
出願日
2023-06-26
発明の名称
制御システム及び作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250107BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】複数のセンサを用いた障害物回避制御を高い信頼性で行う制御システム及び作業機を提供する。
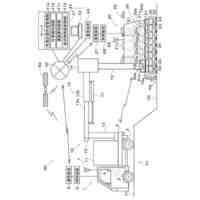
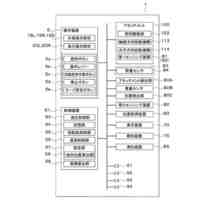
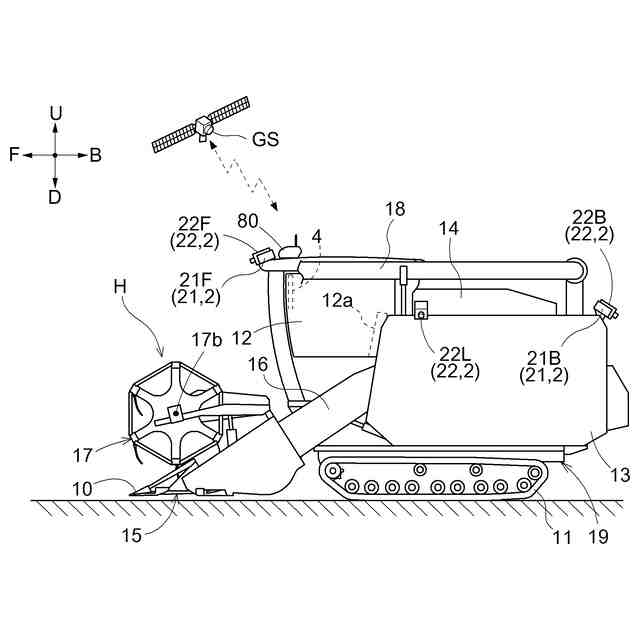
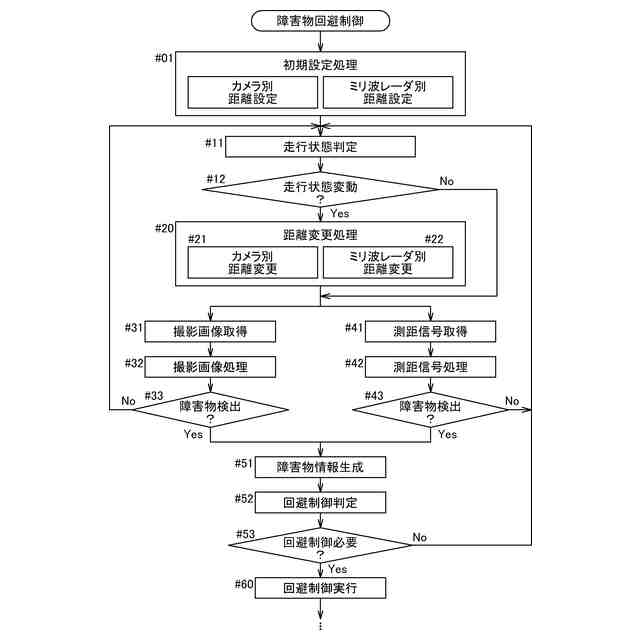
【解決手段】作業機の制御システムは、障害物を検知する複数のセンサ2と、作業機の走行状態を検知する走行状態検知部51と、複数のセンサ2による検知結果に基づいて、作業機が障害物に干渉することを回避するための制御である回避制御を実行する回避制御部64と、複数のセンサ2のそれぞれの障害物に対する検知可能距離、及び、制御実行距離の少なくとも一方を変更する距離変更部52とを備える。回避制御部64は、作業機と障害物との間の距離が制御実行距離以下である場合に、回避制御を実行し、距離変更部52は、走行状態検知部51によって検知された走行状態に基づいて、検知可能距離、及び、制御実行距離の少なくとも一方を変更する。
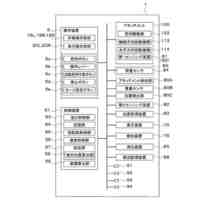
【選択図】図5
特許請求の範囲
【請求項1】
作業機の制御システムであって、
それぞれ異なる方向をセンシングして前記作業機にとっての障害物を検知する複数のセンサと、
前記作業機の走行状態を検知する走行状態検知部と、
前記複数のセンサによる検知結果に基づいて、前記作業機が前記障害物に干渉することを回避するための制御である回避制御を実行する回避制御部と、
前記複数のセンサのそれぞれの前記障害物に対する検知可能距離、及び、制御実行距離の少なくとも一方を変更する距離変更部と、を備え、
前記回避制御部は、前記作業機と前記障害物との間の距離が前記制御実行距離以下である場合に、前記回避制御を実行し、
前記距離変更部は、前記走行状態検知部によって検知された前記走行状態に基づいて、前記検知可能距離、及び、前記制御実行距離の少なくとも一方を変更する制御システム。
続きを表示(約 1,300 文字)
【請求項2】
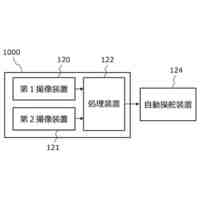
前記複数のセンサには、測距センサと撮影画像を生成するカメラとが含まれている請求項1に記載の制御システム。
【請求項3】
前記測距センサによる前記検知可能距離は、前記カメラによる前記検知可能距離より長い請求項2に記載の制御システム。
【請求項4】
前記複数のセンサには、前記作業機の前方を検知範囲とする前検知センサと前記作業機の後方を検知範囲とする後検知センサとが含まれ、
前記作業機の前進時には、前記後検知センサの前記検知可能距離及び前記制御実行距離の少なくとも一方は、前記距離変更部によって、前記作業機の後進時よりも短くされ、
前記後進時には、前記前検知センサの前記検知可能距離及び前記制御実行距離の少なくとも一方は、前記距離変更部によって、前記前進時よりも短くされる請求項1に記載の制御システム。
【請求項5】
前記複数のセンサには、前記作業機の左方を検知範囲とする左検知センサと前記作業機の右方を検知範囲とする右検知センサとが含まれ、
前記作業機の左旋回時には、前記右検知センサの前記検知可能距離及び前記制御実行距離の少なくとも一方は、前記距離変更部によって、前記作業機の右旋回時よりも短くされ、
前記右旋回時には、前記左検知センサの前記検知可能距離及び前記制御実行距離の少なくとも一方は、前記距離変更部によって、前記左旋回時よりも短くされる請求項1に記載の制御システム。
【請求項6】
前記作業機における前部に作業装置が昇降可能に備えられ、
前記複数のセンサには、前記作業機の前方の前記障害物を検知する前検知センサが含まれ、
前記走行状態検知部によって前記作業装置の上昇状態が検知されている場合、前記前検知センサによる障害物検知が中止される請求項1に記載の制御システム。
【請求項7】
自車位置算出部によって算出された前記作業機の自車位置と前記センサによる障害物検知結果とに基づいて、検知された前記障害物の位置を算出する障害物位置算出部が備えられ、前記障害物が前記作業機の走行対象となっている作業地の外側に位置する場合、当該障害物は無視される請求項1から6のいずれか一項に記載の制御システム。
【請求項8】
それぞれ異なる方向をセンシングして障害物を検知する複数のセンサと、
機体の走行状態を検知する走行状態検知部と、
前記複数のセンサによる検知結果に基づいて、前記機体が前記障害物に干渉することを回避するための制御である回避制御を実行する回避制御部と、
前記複数のセンサのそれぞれの前記障害物に対する検知可能距離、及び、制御実行距離の少なくとも一方を変更する距離変更部と、を備え、
前記回避制御部は、前記機体と前記障害物との間の距離が前記制御実行距離以下である場合に、前記回避制御を実行し、
前記距離変更部は、前記走行状態検知部によって検知された前記走行状態に基づいて、前記検知可能距離、及び、前記制御実行距離の少なくとも一方を変更する作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機を制御する制御システム、及び作業機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年の作業機は、障害物を検出する障害物センサを備え、この障害物センサが障害物を検出すると、障害物との衝突を回避するために回避操舵や緊急停車を行う回避制御機能を備えている。
【0003】
回避制御機能を備えた自動走行作業車が、特許文献1から知られている。特許文献1による回避制御では、障害物センサの障害物検出領域は、検出された作業走行状態に基づいて、変更可能である。例えば、機体に横幅の大きな作業装置が取り付けられている場合、障害物検出領域の横幅が拡張される。また、機体が左折(または右折)する場合、障害物検出領域の左側(または右側)が拡張される。
【先行技術文献】
【特許文献】
【0004】
特開2018-113937号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、障害物センサの障害物領域の拡張や縮小についての記載はあるが、障害物センサの障害物に対する検知可能距離や制御実行距離(回避制御が実行される距離)を状況に応じて変更させることは開示されていない。障害物センサの障害物に対する検知可能距離や制御実行距離を状況に応じて変更させることは、より信頼性の高い障害物回避制御を行うためには重要である。信頼性の低い障害物回避制御では、例えば、不要な障害物検出に基づく不要な作業車の停車などが頻繁に生じる。また、特許文献1には、複数のセンサを代表する前方中央をセンシングするセンサの障害物検出領域の変更は記載されているが、複数の障害物センサの障害物検出領域を個別に変更することは記載されていない。
【0006】
従来の障害物回避制御では、機体と障害物との間で干渉が生じないにもかかわらず、障害物回避制御によって作業車が停車するといった不都合が生じる問題がある。
【0007】
本発明の目的は、複数のセンサを用いた障害物回避制御を高い信頼性で行う制御システム及び作業機を提供することである。
【課題を解決するための手段】
【0008】
本発明による作業機の制御システムの特徴は、それぞれ異なる方向をセンシングして前記作業機にとっての障害物を検知する複数のセンサと、前記作業機の走行状態を検知する走行状態検知部と、前記複数のセンサによる検知結果に基づいて、前記作業機が前記障害物に干渉することを回避するための制御である回避制御を実行する回避制御部と、前記複数のセンサのそれぞれの前記障害物に対する検知可能距離、及び、制御実行距離の少なくとも一方を変更する距離変更部と、を備え、前記回避制御部は、前記作業機と前記障害物との間の距離が前記制御実行距離以下である場合に、前記回避制御を実行し、前記距離変更部は、前記走行状態検知部によって検知された前記走行状態に基づいて、前記検知可能距離、及び、前記制御実行距離の少なくとも一方を変更する。
【0009】
本発明による作業機の特徴は、それぞれ異なる方向をセンシングして障害物を検知する複数のセンサと、機体の走行状態を検知する走行状態検知部と、前記複数のセンサによる検知結果に基づいて、前記機体が前記障害物に干渉することを回避するための制御である回避制御を実行する回避制御部と、前記複数のセンサのそれぞれの前記障害物に対する検知可能距離、及び、制御実行距離の少なくとも一方を変更する距離変更部と、を備え、前記回避制御部は、前記機体と前記障害物との間の距離が前記制御実行距離以下である場合に、前記回避制御を実行し、前記距離変更部は、前記走行状態検知部によって検知された前記走行状態に基づいて、前記検知可能距離、及び、前記制御実行距離の少なくとも一方を変更する。
【0010】
本構成によれば、複数のセンサのそれぞれの障害物に対する検知可能距離、及び、制御実行距離の少なくとも一方は、走行状態検知部によって検知された走行状態に基づいて、距離変更部によって変更される。これにより、センサ毎に、より信頼性の高い障害物検知が可能となり、結果的に、機体と障害物との間で干渉が生じないにもかかわらず、回避制御(作業機の停止など)が実行されるといった不都合が抑制される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
桝蓋
1か月前
株式会社クボタケミックス
多層管
20日前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業車
20日前
株式会社クボタ
システム
今日
株式会社クボタケミックス
取付部材
28日前
株式会社クボタ
水処理装置
8日前
株式会社クボタ
圃場作業機
1か月前
株式会社クボタ
水田作業車
27日前
株式会社クボタ
水田作業車
27日前
株式会社クボタ
膜分離装置
21日前
株式会社クボタ
水処理装置
8日前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
作物検知システム
今日
株式会社クボタ
弁箱用の消失模型
29日前
株式会社クボタ
作業車制御システム
今日
株式会社クボタ
塗装方法及び塗装系
7日前
株式会社クボタ
粒状物供給システム
8日前
株式会社クボタ
独立型水利用システム
1か月前
株式会社クボタ
自動走行制御システム
今日
株式会社クボタ
制御システム及び作業機
今日
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
列検出システムおよび農業機械
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
排気ガス再循環装置およびエンジン
29日前
株式会社クボタ
排気ガス再循環装置およびエンジン
29日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
6日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
6日前
株式会社クボタ
電動作業機及び電動作業機の起動方法
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ