TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025003101
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103586
出願日
2023-06-23
発明の名称
歪センサ及び歪の検知方法
出願人
国立大学法人金沢大学
,
国立大学法人東北大学
代理人
個人
主分類
G01L
5/00 20060101AFI20241226BHJP(測定;試験)
要約
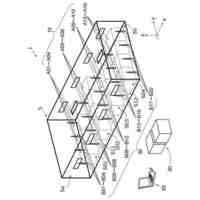
【課題】1自由度の流体制御が行われる起歪体が受ける外力を別の物理量に変換する、新しいタイプの歪センサ及び歪の検知方法を提供する。
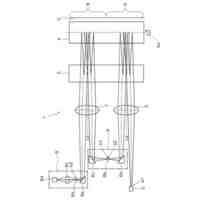
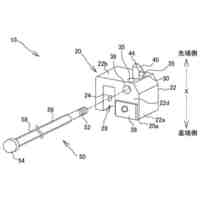
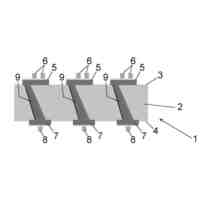
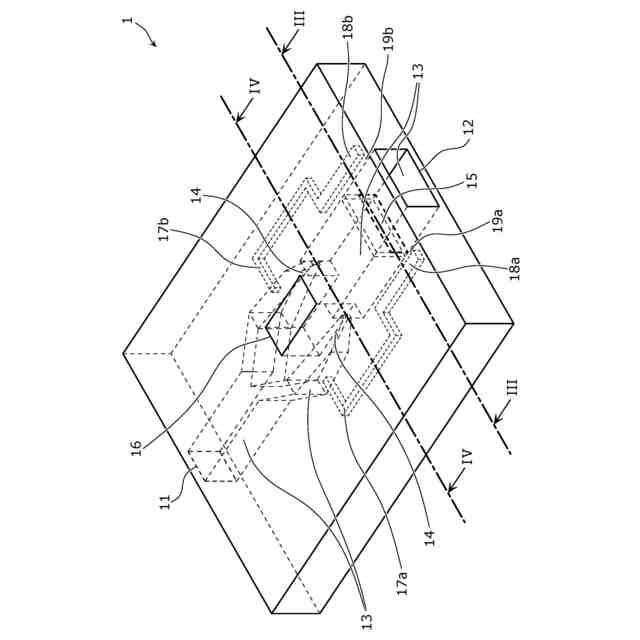
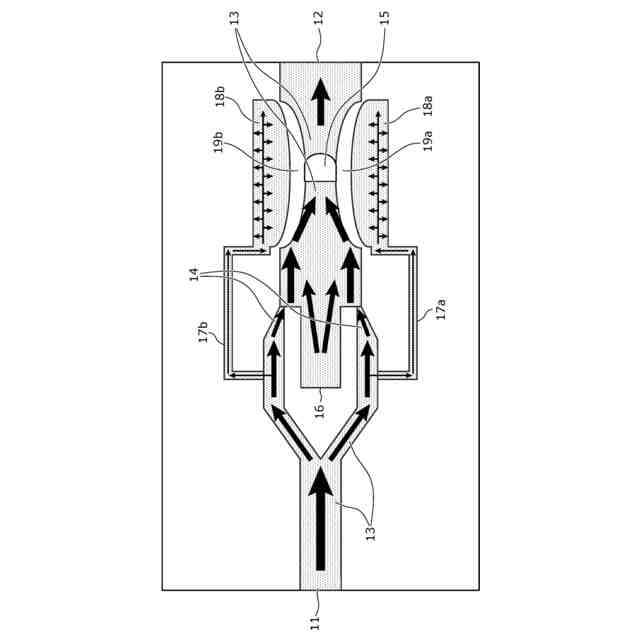
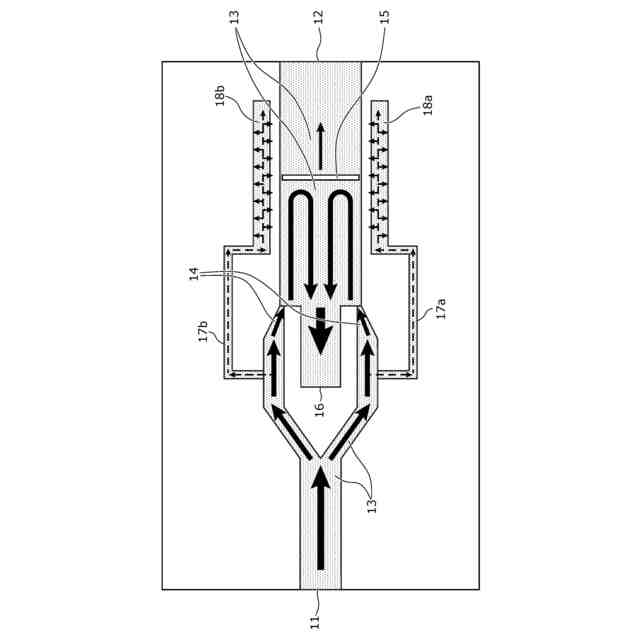
【解決手段】弾性部材からなる板状の起歪体を備え、起歪体は、起歪体の第1側面に設けられた開口である入口11と起歪体の第2側面に設けられた開口である出口12とを繋いで起歪体の内部を貫通する流路13を有し、流路13は、流路の途中において、流路断面積が局所的に小さい箇所であるノズル14を有し、ノズル14は、起歪体が外力を受けることによってノズル14に生じた歪に応じてノズル14における流路断面積を変化させることで、入口11に送り込まれる流体の圧力を変化させる、又は、ノズル14は発生する音の特性を変化させる。
【選択図】図1
特許請求の範囲
【請求項1】
弾性部材からなる板状の起歪体を備え、
前記起歪体は、前記起歪体の第1側面に設けられた開口である入口と前記起歪体の第2側面に設けられた開口である出口とを繋いで前記起歪体の内部を貫通する流路を有し、
前記流路は、前記流路の途中において、流路断面積が局所的に小さい箇所であるノズルを有し、
前記ノズルは、前記起歪体が外力を受けることによって前記ノズルに生じた歪に応じて前記ノズルにおける流路断面積を変化させることで、前記入口に送り込まれる流体の圧力を変化させる、又は、前記ノズルは発生する音の特性を変化させる、
歪センサ。
続きを表示(約 940 文字)
【請求項2】
前記ノズルは、切れ込みを有する、
請求項1記載の歪センサ。
【請求項3】
請求項1又は2記載の歪センサを用いた歪の検知方法であって、
前記歪センサを、外力を受ける場所に設置する設置ステップと、
前記歪センサの前記入口に流体を送り込む流入ステップと、
前記歪センサの前記入口に送り込む流体の圧力を検知する検知ステップと、を含む、
歪の検知方法。
【請求項4】
前記起歪体は、前記ノズルよりも前記出口に近い前記流路を開閉する弁を有し、
前記起歪体は、前記弁よりも前記入口に近い前記流路に通じる開口である吸引放出口を有し、
前記流入ステップでは、前記開口が外界の空気を吸引することとなる流量で、前記入口に前記流体を送り込む、
請求項3記載の歪の検知方法。
【請求項5】
さらに、前記検知ステップで検知された前記流体の圧力を解析することで、前記外力の大きさを特定する解析ステップを含む、
請求項3記載の歪の検知方法。
【請求項6】
請求項1又は2記載の歪センサを用いた歪の検知方法であって、
前記歪センサを、外力を受ける場所に設置する設置ステップと、
前記歪センサの前記入口に流体を送り込む流入ステップと、
前記歪センサの前記ノズルが発生する音を検知する検知ステップと、を含む、
歪の検知方法。
【請求項7】
さらに、前記検知ステップで検知された前記音の大きさを解析することで、前記外力の大きさを特定する解析ステップを含む、
請求項6記載の歪の検知方法。
【請求項8】
さらに、前記検知ステップで検知された前記音の周波数スペクトルを解析することで、前記起歪体のうち前記外力を受けた位置を特定する解析ステップを含む、
請求項6記載の歪の検知方法。
【請求項9】
さらに、前記検知ステップで検知された前記音の周波数スペクトルを解析することで、前記起歪体が受けた湾曲の程度を特定する解析ステップを含む、
請求項6記載の歪の検知方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、歪センサ及び歪の検知方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、歪センサとして、様々なタイプの歪センサが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-133175号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、流体の流れを利用した新しいタイプの歪センサ及び歪の検知方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本開示の一形態に係る歪センサは、弾性部材からなる板状の起歪体を備え、前記起歪体は、前記起歪体の第1側面に設けられた開口である入口と前記起歪体の第2側面に設けられた開口である出口とを繋いで前記起歪体の内部を貫通する流路を有し、前記流路は、前記流路の途中において、流路断面積が局所的に小さい箇所であるノズルを有し、前記ノズルは、前記起歪体が外力を受けることによって前記ノズルに生じた歪に応じて前記ノズルにおける流路断面積を変化させることで、前記入口に送り込まれる流体の圧力を変化させる、又は、前記ノズルは発生する音の特性を変化させる。
【0006】
上記目的を達成するために、本開示の一形態に係る歪の検知方法は、上記の歪センサを用いた歪の検知方法であって、前記歪センサを、外力を受ける場所に設置する設置ステップと、前記歪センサの前記入口に流体を送り込む流入ステップと、前記歪センサの前記入口に送り込む流体の圧力を検知する検知ステップと、を含む。
【発明の効果】
【0007】
本開示により、流体の流れを利用した新しいタイプの歪センサ及び歪の検知方法が提供される。
【図面の簡単な説明】
【0008】
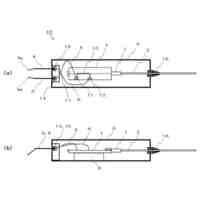
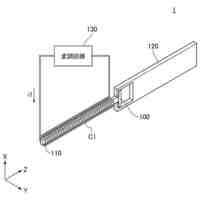
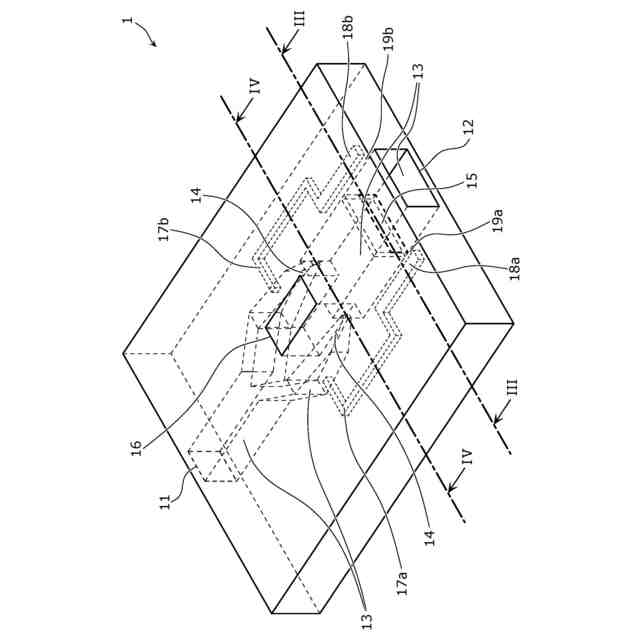
図1は、実施の形態1に係る歪センサの構造の一例を示す斜視図である。
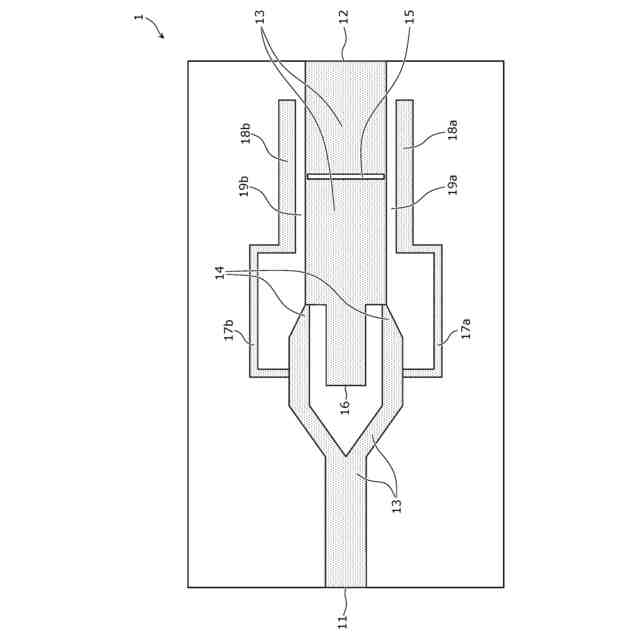
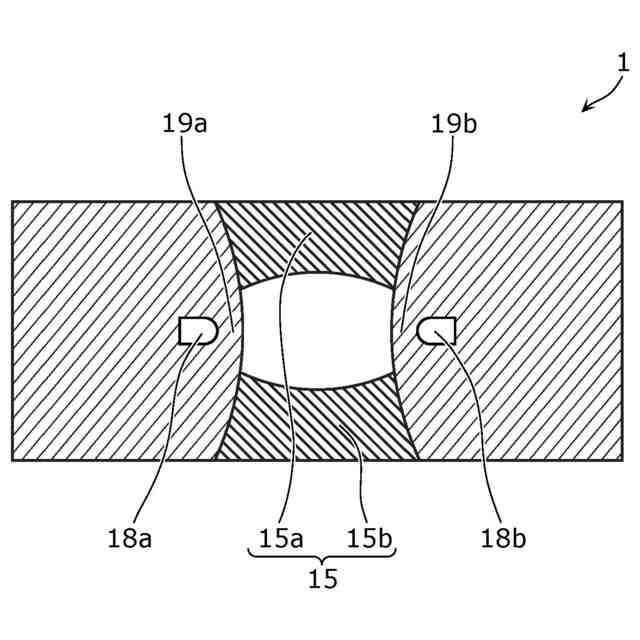
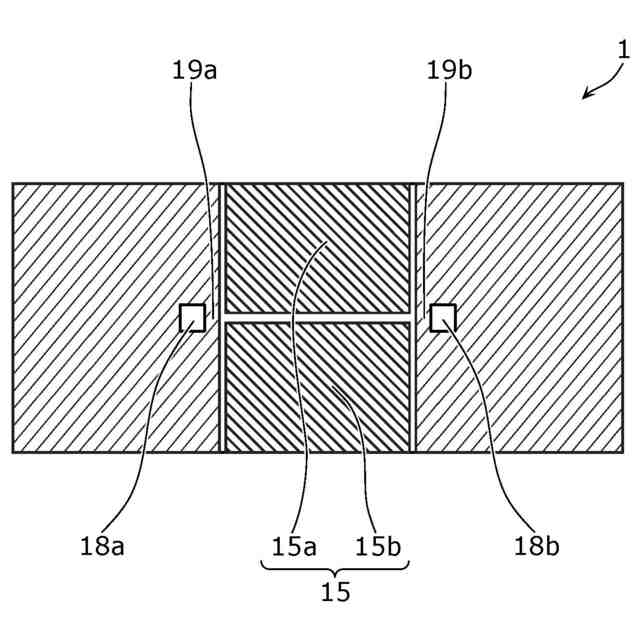
図2は、図1の歪センサの上面図である。
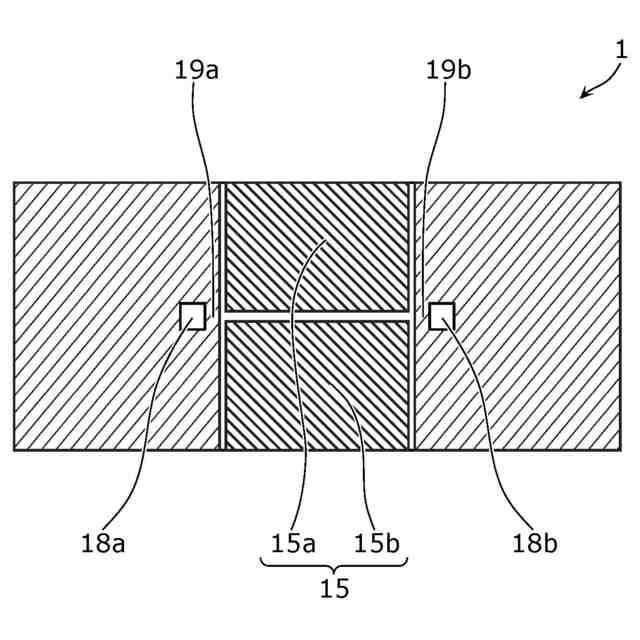
図3は、図1のIII-III線における断面図である。
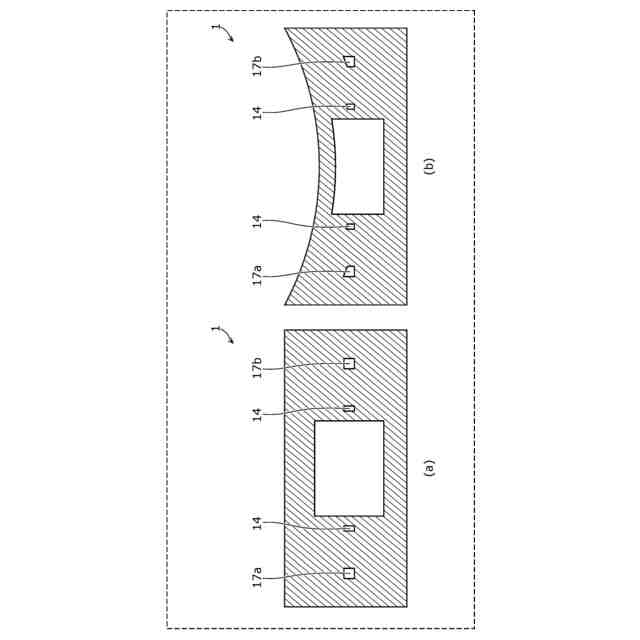
図4は、図1のIV-IV線における断面図である。
図5は、図1の歪センサに高流量の流体が送り込まれたときの動作を示す図である。
図6は、図1の歪センサに高流量の流体が送り込まれたときにおける図1のIII-III線の断面図である。
図7は、図1の歪センサに低流量の流体が送り込まれたときの動作を示す図である。
図8は、図1の歪センサに低流量の流体が送り込まれたときにおける図1のIII-III線の断面図である。
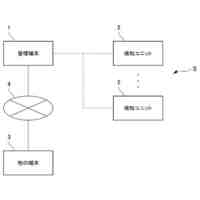
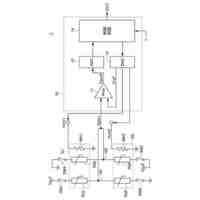
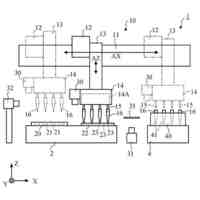
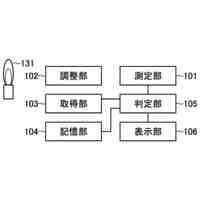
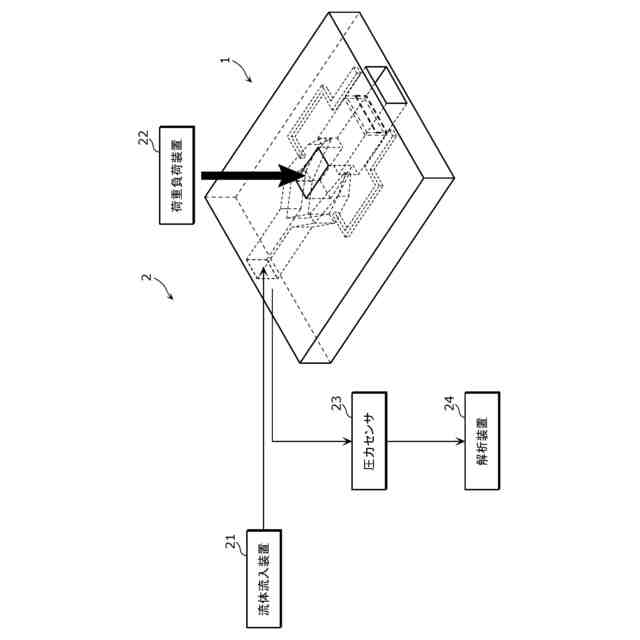
図9は、実施の形態1に係る歪検知システムの構成を示すブロック図である。
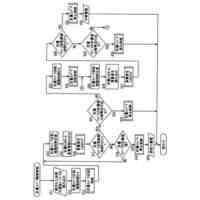
図10は、図9における歪検知システムの動作を示すフローチャートである。
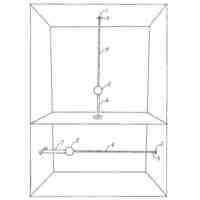
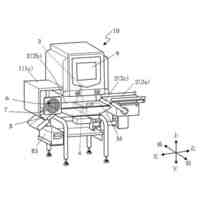
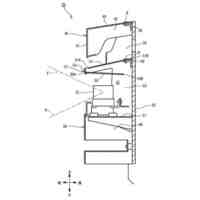
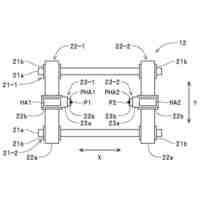
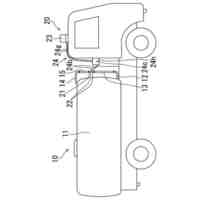
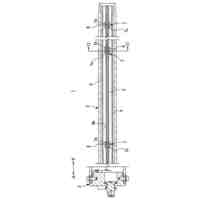
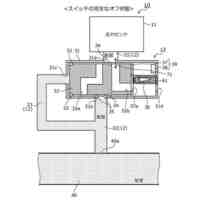
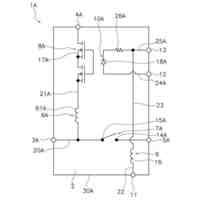
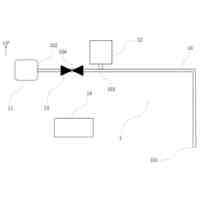
図11は、図9に係る歪検知システムにおける荷重負荷装置の構成及び動作についての模式図である。
図12は、図9の歪検知システムにおいて歪センサに送り込まれる流体の流量を10L/minと一定にした場合に、図1の歪センサが受ける外力と圧力センサが検知する流体の圧力との関係を示すグラフである。
図13は、図9の歪検知システムにおいて歪センサに送り込まれる流体の流量を変化させた場合に、図1の歪センサが受ける外力と圧力センサが検知する流体の圧力との関係を示すグラフである。
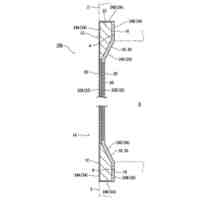
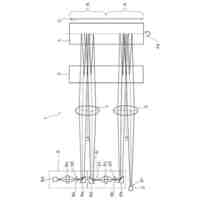
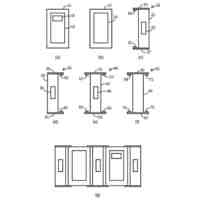
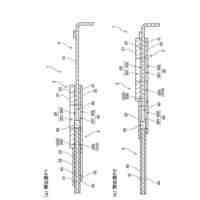
図14は、実施の形態2に係る歪センサの構造の一例を示す図である。
図15は、図14の歪センサの上面図である。
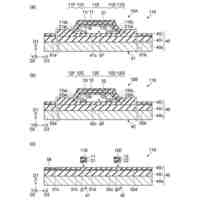
図16は、図15の(b)の各断面から見た一例を示す断面図である。
図17は、図15の(b)の各断面から見た別の一例を示す断面図である。
図18は、図15の(b)の各断面から見たさらに別の一例を示す断面図である。
図19は、実施の形態2に係る歪検知システムの構成を示すブロック図である。
図20は、図19における歪検知システムの主要な動作を示すフローチャートである。
図21は、図20における解析ステップの詳細な動作を示すフローチャートである。
図22は、図19に係る歪検知システムにおける荷重負荷装置の構成及び動作についての模式図である。
図23は、図14の歪センサに対して外力をかける位置と外力の大きさを変化させた場合におけるノズルから発生する音の音圧との関係を示すグラフである。
図24は、図14の歪センサに対して外力をかける位置と外力の大きさを変化させた場合におけるノズルが発生する音の周波数との関係を示すグラフである。
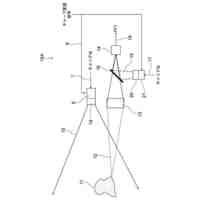
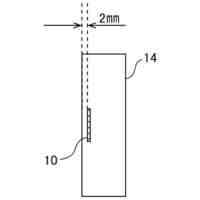
図25は、図14の歪センサを湾曲させる実験の様子を示す図である。
図26は、図19の歪検知システムにおいて歪センサに送り込まれる流体の流量を10L/minと一定にした場合に、図14の歪センサが受ける湾曲の程度を変化させたときのノズルが発生する音の周波数におけるスペクトルの時間変化との関係を示すグラフである。
【発明を実施するための形態】
【0009】
以下、本開示の実施の形態について、図面を参照しながら説明する。なお、以下に説明する実施の形態は、いずれも本開示の一具体例を示すものである。したがって、以下の実施の形態で示される、数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、並びに、工程、ステップ及び工程の順序等は、一例であって本開示を限定する主旨ではない。よって、以下の実施の形態における構成要素のうち、本開示の最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。
【0010】
なお、各図は、模式図であり、必ずしも厳密に図示されたものではない。したがって、各図において縮尺などは必ずしも一致していない。また、各図において、実質的に同一の構成に対しては同一の符号を付しており、重複する説明は省略又は簡略化する。また、本明細書において、「上」及び「下」という用語は、必ずしも、絶対的な空間認識における上方向(鉛直上方)及び下方向(鉛直下方)を指すものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
微小振動検出装置
10日前
ユニパルス株式会社
力変換器
1か月前
株式会社イシダ
X線検査装置
10日前
横浜ゴム株式会社
音響窓
1か月前
株式会社豊田自動織機
産業車両
1か月前
三菱電機株式会社
計測器
25日前
株式会社辰巳菱機
システム
19日前
株式会社国際電気
試験装置
1か月前
個人
センサーを備えた装置
1か月前
日置電機株式会社
測定装置
1か月前
IPU株式会社
距離検出装置
1か月前
日本精機株式会社
施工管理システム
1か月前
アンリツ株式会社
分光器
5日前
アンリツ株式会社
分光器
5日前
株式会社東芝
センサ
10日前
株式会社東芝
センサ
1か月前
株式会社FRPカジ
FRP装置
21日前
ダイハツ工業株式会社
測定用具
3日前
株式会社CAST
センサ固定治具
1か月前
富士レビオ株式会社
嵌合システム
24日前
TDK株式会社
ガスセンサ
13日前
大和製衡株式会社
組合せ計量装置
21日前
株式会社カワタ
サンプリング装置
14日前
株式会社田中設備
報知装置
1か月前
学校法人立命館
液面レベルセンサ
18日前
日本精工株式会社
分注装置
17日前
株式会社精工技研
光電圧プローブ
11日前
株式会社ヨコオ
コンタクタ
3日前
TDK株式会社
磁気センサ
6日前
大陽日酸株式会社
液面センサ
6日前
富士電機株式会社
半導体パッケージ
27日前
オムロン株式会社
スイッチング装置
1か月前
WOTA株式会社
液位検出システム
1か月前
日本装置開発株式会社
X線検査装置
1か月前
株式会社熊平製作所
刃物類判別装置
1か月前
アズビル株式会社
火炎状態判定装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ