TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002960
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103376
出願日
2023-06-23
発明の名称
測位装置、測位方法及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
G01B
11/00 20060101AFI20241226BHJP(測定;試験)
要約
【課題】より適切に移動体の位置を導出する。
【解決手段】測位装置は、発光装置が取り付けられた移動体を撮影した画像内における発光装置の発光位置を特定可能な第1期間において、画像内における発光位置に基づいて移動体の実空間における位置を導出し、画像内における発光位置を特定不能な第1期間とは異なる第2期間において、画像における移動体の外観に係る特徴に基づいて画像内における発光位置を推定することで、移動体の実空間における位置を導出する、処理部を備える。
【選択図】図9
特許請求の範囲
【請求項1】
発光装置が取り付けられた移動体を撮影した画像内における前記発光装置の発光位置を特定可能な第1期間において、前記画像内における前記発光位置に基づいて前記移動体の実空間における位置を導出し、
画像内における前記発光位置を特定不能な前記第1期間とは異なる第2期間において、前記画像における前記移動体の外観に係る特徴に基づいて前記画像内における前記発光位置を推定することで、前記移動体の実空間における位置を導出する、
処理部を備える測位装置。
続きを表示(約 1,900 文字)
【請求項2】
前記処理部は、
前記第1期間において、前記画像のうち前記発光位置を基準とした所定の枠内の部分を含む教師データを機械学習モデルに入力することによって、画像に含まれる前記移動体を識別するように前記機械学習モデルに機械学習を行わせ、
前記第2期間において、前記機械学習を行わせた前記機械学習モデルにより、前記画像に含まれる前記移動体を識別させ、当該識別の結果に基づいて前記移動体の前記画像内における位置を特定し、当該特定の結果に基づいて前記発光位置を推定する、
請求項1に記載の測位装置。
【請求項3】
前記処理部は、
前記第1期間において、前記画像のうち前記発光位置を基準とした所定の枠内における前記移動体の外観に係る前記特徴を抽出し、
前記第2期間において、抽出した前記特徴に基づいて前記移動体の前記画像内における位置を特定し、当該特定の結果に基づいて前記発光位置を推定する、
請求項1に記載の測位装置。
【請求項4】
前記処理部は、
前記画像を撮影する撮影装置が設けられた所定位置と、前記第1期間において導出された前記移動体の実空間における位置との距離が近いほど前記所定の枠が大きくなるように前記所定の枠を設定する、
請求項2又は3に記載の測位装置。
【請求項5】
前記処理部は、複数の前記画像の各々について、前記第1期間に相当する場合には前記発光位置を特定し、前記第2期間に相当する場合には前記発光位置を推定し、前記複数の画像において導出又は推定された複数の発光位置に基づいて前記移動体の実空間における位置を導出する、
請求項1~3のいずれか一項に記載の測位装置。
【請求項6】
移動体に取り付けられた撮影装置により発光装置を撮影した画像内における前記発光装置の発光位置を特定可能な第1期間において、前記画像内における前記発光装置の前記発光位置に基づいて前記移動体の実空間における位置を導出し、
画像内における前記発光位置を特定不能な前記第1期間とは異なる第2期間において、前記画像における前記発光装置が設けられている場所の外観に係る特徴に基づいて前記画像内における前記発光装置の発光位置を推定することで、前記移動体の実空間における位置を導出する、
処理部を備える測位装置。
【請求項7】
前記処理部は、
前記第1期間において、前記画像のうち前記発光位置を基準とした所定の枠内の部分を含む教師データを機械学習モデルに入力することによって、画像に含まれる前記場所を識別するように前記機械学習モデルに機械学習を行わせ、
前記第2期間において、前記機械学習を行わせた前記機械学習モデルにより、前記画像に含まれる前記場所を識別させ、当該識別の結果に基づいて前記場所の前記画像内における位置を特定し、当該特定の結果に基づいて前記発光位置を推定する、
請求項6に記載の測位装置。
【請求項8】
前記処理部は、
前記第1期間において、前記画像のうち前記発光位置を基準とした所定の枠内における前記場所の外観に係る前記特徴を抽出し、
前記第2期間において、抽出した前記特徴に基づいて前記場所の前記画像内における位置を特定し、当該特定の結果に基づいて前記発光位置を推定する、
請求項6に記載の測位装置。
【請求項9】
前記処理部は、
前記発光装置が設けられた所定位置と、前記第1期間において導出された前記移動体の実空間における位置との距離が近いほど前記所定の枠が大きくなるように前記所定の枠を設定する、
請求項7又は8に記載の測位装置。
【請求項10】
前記処理部は、
複数の前記発光装置が前記画像に含まれている場合に、前記複数の発光装置の各々の発光パターンに基づいて前記複数の発光装置を判別し、
前記複数の発光装置の各々が前記第1期間及び前記第2期間のいずれに相当するかを判別し、
前記第1期間に相当する発光装置については、当該発光装置の発光位置を特定し、
前記第2期間に相当する発光装置については、前記場所の外観に係る前記特徴に基づいて識別された前記場所の前記画像内における位置から、前記画像内における前記発光装置の発光位置を推定する、
請求項6~8のいずれか一項に記載の測位装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、測位装置、測位方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、空間を移動する移動体が、当該空間に設けられた発光装置の発光信号に基づいて自装置の位置を導出する技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-76401号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来技術には、発光装置を小型化したり、発光装置と移動体との距離が遠くなったりすると、発光信号の検出及び位置の導出を適切に行うことができなくなる場合があるという課題がある。
【0005】
本発明は、より適切に移動体の位置を導出することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る測位装置は、
発光装置が取り付けられた移動体を撮影した画像内における前記発光装置の発光位置を特定可能な第1期間において、前記画像内における前記発光位置に基づいて前記移動体の実空間における位置を導出し、
画像内における前記発光位置を特定不能な前記第1期間とは異なる第2期間において、前記画像における前記移動体の外観に係る特徴に基づいて前記画像内における前記発光位置を推定することで、前記移動体の実空間における位置を導出する、
処理部を備える。
【0007】
上記課題を解決するため、本発明に係る測位装置は、
移動体に取り付けられた撮影装置により発光装置を撮影した画像内における前記発光装置の発光位置を特定可能な第1期間において、前記画像内における前記発光装置の前記発光位置に基づいて前記移動体の実空間における位置を導出し、
画像内における前記発光位置を特定不能な前記第1期間とは異なる第2期間において、前記画像における前記発光装置が設けられている場所の外観に係る特徴に基づいて前記画像内における前記発光装置の発光位置を推定することで、前記移動体の実空間における位置を導出する、
処理部を備える。
【発明の効果】
【0008】
本発明によれば、より適切に移動体の位置を導出することができる。
【図面の簡単な説明】
【0009】
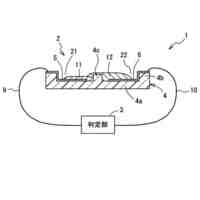
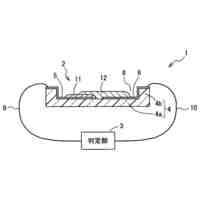
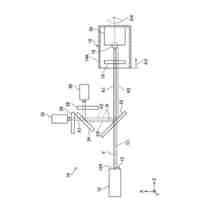
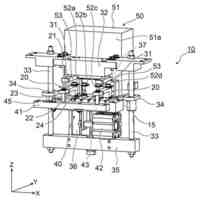
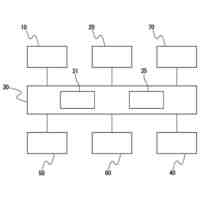
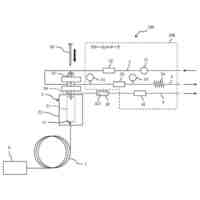
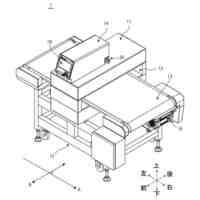
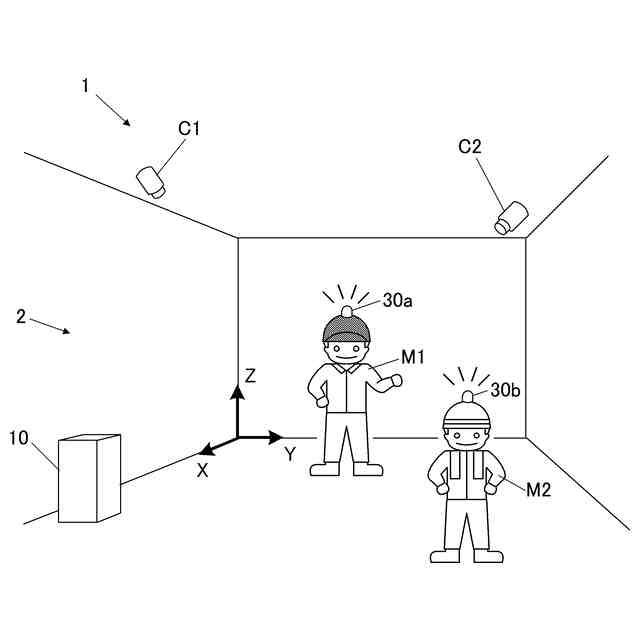
第1の実施形態の測位システムの構成を示す図である。
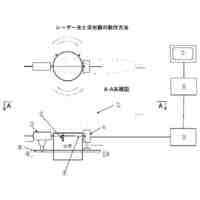
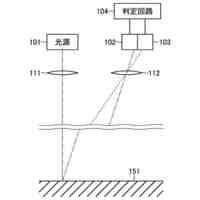
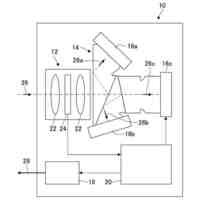
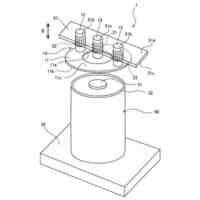
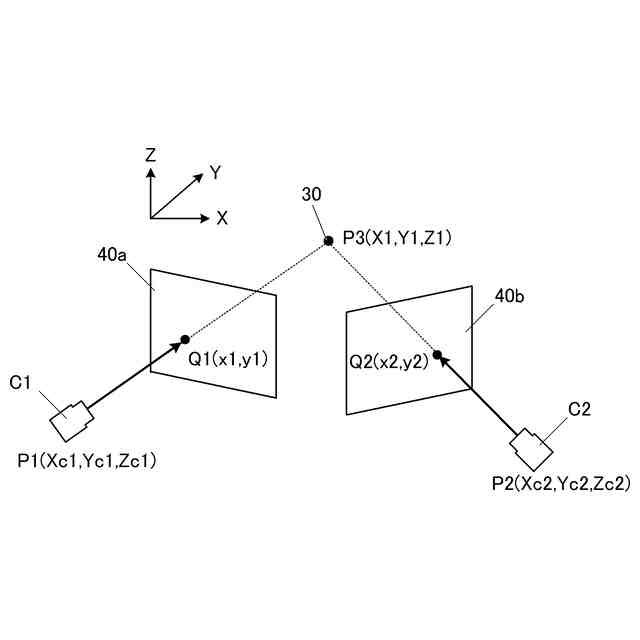
第1の実施形態の測位システムにおける測位の原理を説明する図である。
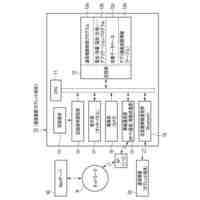
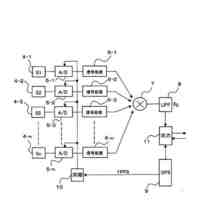
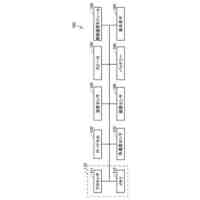
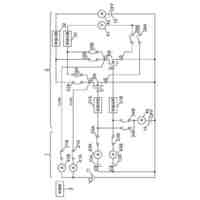
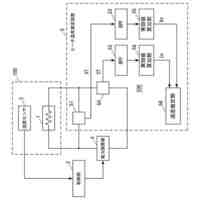
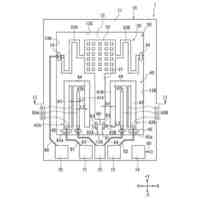
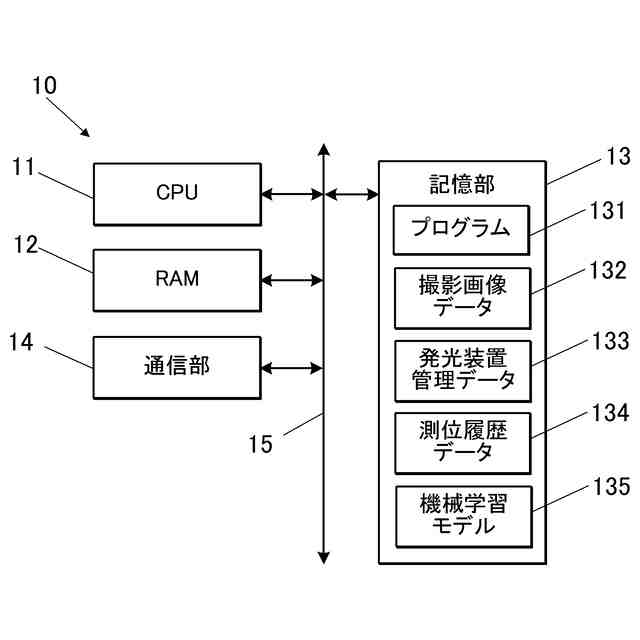
測位装置の機能構成を示すブロック図である。
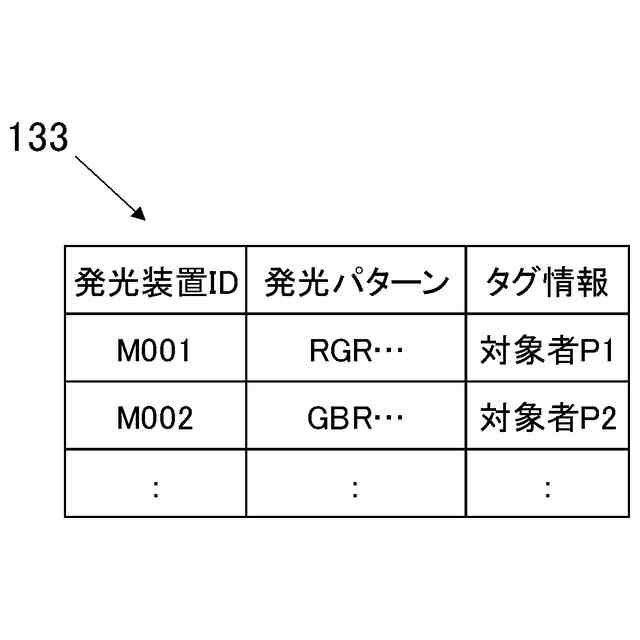
発光装置管理データの内容を示す図である。
測位履歴データの内容を示す図である。
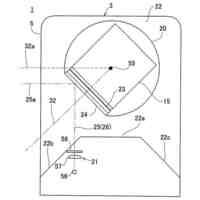
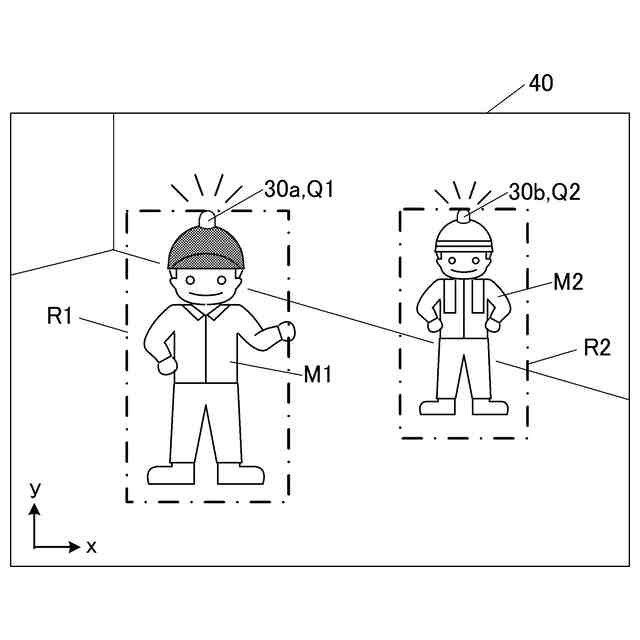
或るカメラにより或るタイミングで撮影された撮影画像を示す図である。
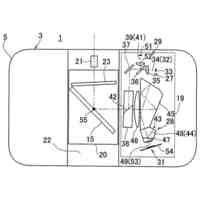
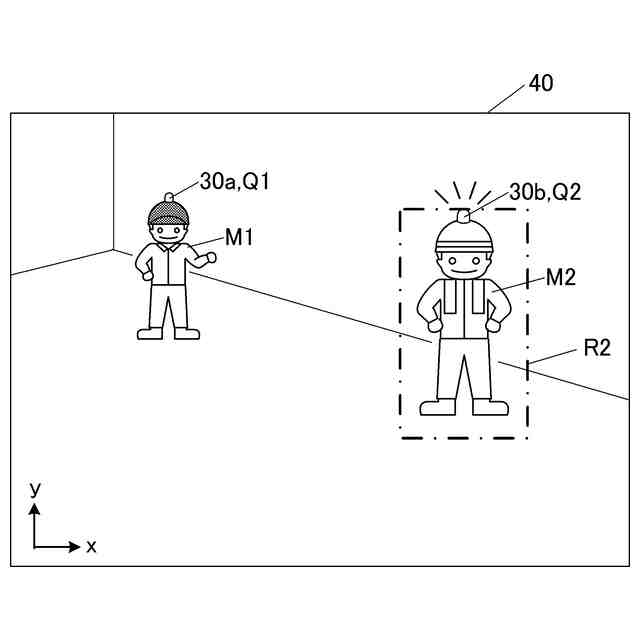
或るカメラにより図6とは異なるタイミングで撮影された撮影画像を示す図である。
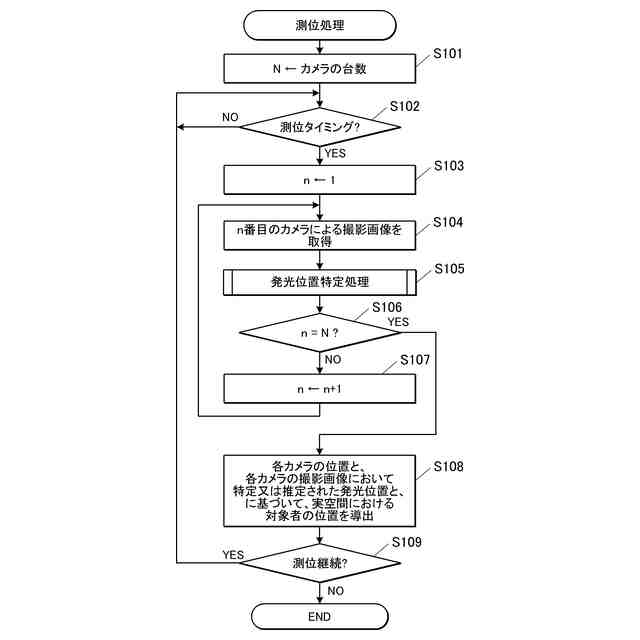
測位処理の制御手順を示すフローチャートである。
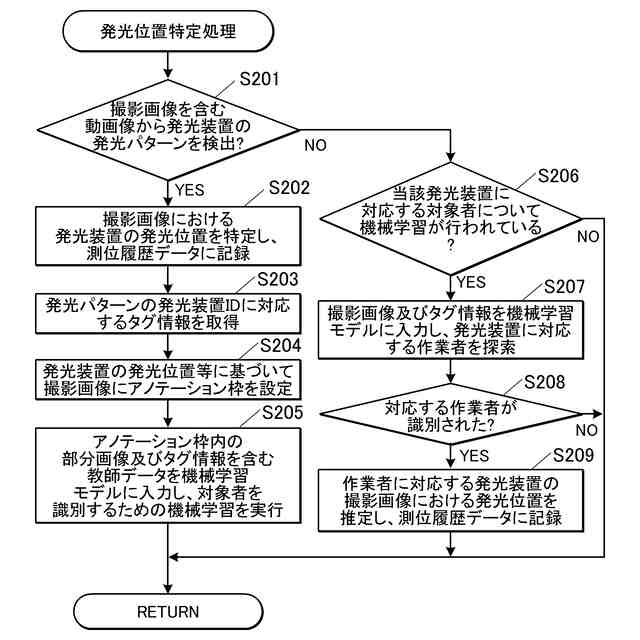
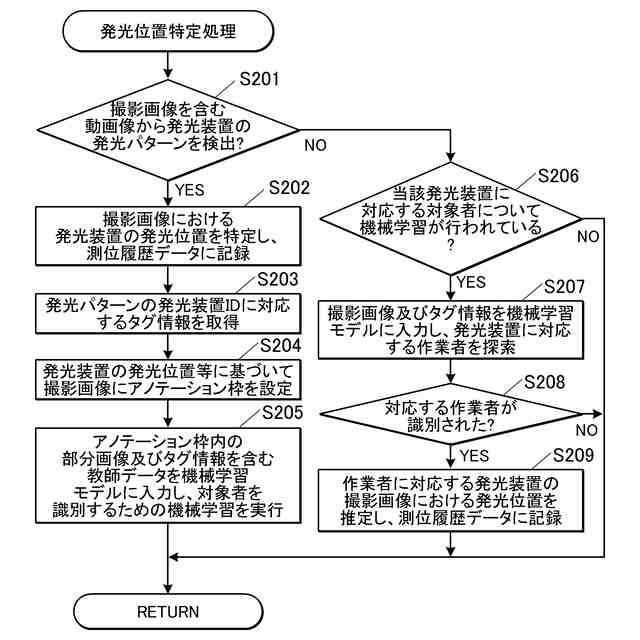
発光位置特定処理の制御手順を示すフローチャートである。
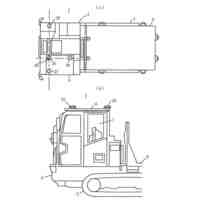
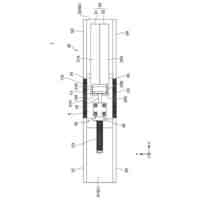
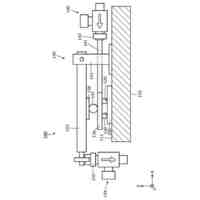
第2の実施形態の測位システムの構成を示す図である。
第2の実施形態の測位システムにおける測位の原理を説明する図である。
車両の機能構成を示すブロック図である。
第2の実施形態における発光装置管理データの内容を示す図である。
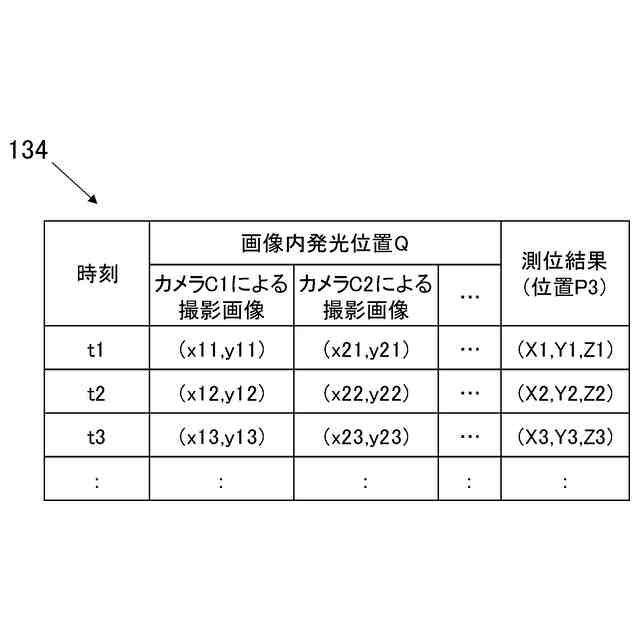
第2の実施形態における測位履歴データの内容を示す図である。
カメラにより或るタイミングで撮影された撮影画像を示す図である。
カメラにより図15とは異なるタイミングで撮影された撮影画像を示す図である。
第2の実施形態における測位処理の制御手順を示すフローチャートである。
第2の実施形態における発光位置特定処理の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
カシオ計算機株式会社
印刷装置、印刷方法およびプログラム
5日前
カシオ計算機株式会社
電子機器、電子機器の制御方法、およびプログラム
5日前
個人
集束超音波の測定機
5日前
個人
センサ制御回路
5日前
株式会社大真空
センサ
9日前
株式会社大真空
センサ
14日前
日本精機株式会社
車両用計器
12日前
CKD株式会社
検査装置
12日前
ダイトロン株式会社
外観検査装置
5日前
株式会社トプコン
測量装置
12日前
株式会社トプコン
測量装置
12日前
株式会社諸岡
自動運転作業機
9日前
学校法人東京電機大学
干渉計
6日前
株式会社国際電気
治具セット
12日前
アズビル株式会社
漏液センサ
9日前
株式会社ミトミ技研
圧力測定装置
5日前
シャープ株式会社
測定装置
12日前
TDK株式会社
磁気センサ
5日前
株式会社ジェイテクト
荷重付与装置
12日前
アズビル株式会社
真空計測システム
9日前
個人
電気計器用結線器
9日前
エスペック株式会社
試験装置
6日前
理研計器株式会社
ガス検知器
9日前
株式会社JVCケンウッド
撮像装置
6日前
株式会社チノー
耐熱配管および測定システム
13日前
株式会社ミツトヨ
目盛板姿勢検査方法
12日前
アズビル株式会社
ヒータ温度推定装置
6日前
有限会社巧機工
冷凍物打撃装置
12日前
株式会社島津製作所
ガスクロマトグラフ
5日前
TDK株式会社
温度センサ
14日前
株式会社エー・アンド・デイ
金属検出機
9日前
エスペック株式会社
二次電池用プローブ
12日前
タカハタプレシジョン株式会社
水道メータ
5日前
シャープ株式会社
粒状物質排出装置
12日前
ローム株式会社
MEMS装置
5日前
東ソー株式会社
D-サイロキシン特異的測定方法
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ