TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025002791
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103143
出願日
2023-06-23
発明の名称
自動充電システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H02J
7/00 20060101AFI20241226BHJP(電力の発電,変換,配電)
要約
【課題】充電ロボットに撮像装置及びセンサを設けることなく、ロボットアームの目標移動位置及び進入角度を算出できる自動充電システムを提供すること。
【解決手段】本発明の自動充電システムは、蓄電装置を搭載する車両と充電コネクタを有する充電ケーブルを備えた充電器とロボットアームを備えた充電ロボットとによって構成された自動充電システムであって、車両は、車両に搭載された撮像装置が撮像した車両周辺の画像または距離センサによって測定された車両と周辺物との間の距離に基づいて、駐車位置及び車両姿勢を算出する車両制御装置と、駐車位置及び車両姿勢を含む充電口への充電コネクタの挿入動作に要する情報を充電ロボットに送信する車両通信装置とを備え、充電ロボットは、挿入動作に要する情報を受信するロボット通信装置と、挿入動作に要する情報に基づいて、ロボットアームの目標移動位置及び進入角度を算出するロボット制御装置とを備える。
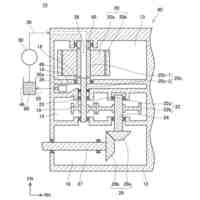
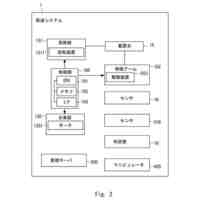
【選択図】図2
特許請求の範囲
【請求項1】
蓄電装置から供給される電力によって駆動される車両と、
充電コネクタを有する充電ケーブルを備えた充電器と、
前記充電コネクタを掴み、駐車スペースに位置する前記車両の充電口に対する、前記充電コネクタの抜き差しを自動的に行うロボットアームを備えた充電ロボットと、
によって構成され、
前記充電口に前記充電コネクタを挿入して前記充電器から前記蓄電装置に電力を供給して充電する自動充電システムであって、
前記車両は、
前記車両に搭載された撮像装置が撮像した車両周辺の画像、または、前記車両に搭載された距離センサによって測定された前記車両と周辺物との間の距離に基づいて、前記駐車スペース内における前記車両の駐車位置及び車両姿勢を算出する車両制御装置と、
前記車両制御装置が算出した前記駐車位置及び前記車両姿勢を含む前記充電口への前記充電コネクタの挿入動作に要する情報を前記充電ロボットに送信する車両通信装置と、
を備えており、
前記充電ロボットは、
前記挿入動作に要する情報を受信するロボット通信装置と、
前記挿入動作に要する情報に基づいて、前記ロボットアームの目標移動位置及び進入角度を算出するロボット制御装置と、
を備える、
ことを特徴とする自動充電システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動充電システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、充電ロボットに設けられた超音波センサによって車両の後輪タイヤを検出し、充電対象の車両位置を確認して充電ロボットによる自動充電を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2000-092622号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された技術では、自動充電を行うために充電ロボットに対して超音波センサを別途で設ける必要がある。また、車両に既存で搭載されている撮像装置であるカメラや、車両と周辺物との間の距離を測定する距離センサなどを利用する場合には、どのように利用すれば、車両の充電口に充電コネクタを挿入するロボットアームの目標移動位置及び進入角度を算出することができるか、改善の余地がある。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、充電ロボットに撮像装置及びセンサを設けることなく、ロボットアームの目標移動位置及び進入角度を算出することができる自動充電システムを提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明に係る自動充電システムは、蓄電装置から供給される電力によって駆動される車両と、充電コネクタを有する充電ケーブルを備えた充電器と、前記充電コネクタを掴み、駐車スペースに位置する前記車両の充電口に対する、前記充電コネクタの抜き差しを自動的に行うロボットアームを備えた充電ロボットと、によって構成され、前記充電口に前記充電コネクタを挿入して前記充電器から前記蓄電装置に電力を供給して充電する自動充電システムであって、前記車両は、前記車両に搭載された撮像装置が撮像した車両周辺の画像、または、前記車両に搭載された距離センサによって測定された前記車両と周辺物との間の距離に基づいて、前記駐車スペース内における前記車両の駐車位置及び車両姿勢を算出する車両制御装置と、前記車両制御装置が算出した前記駐車位置及び前記車両姿勢を含む前記充電口への前記充電コネクタの挿入動作に要する情報を前記充電ロボットに送信する車両通信装置と、を備えており、前記充電ロボットは、前記挿入動作に要する情報を受信するロボット通信装置と、前記挿入動作に要する情報に基づいて、前記ロボットアームの目標移動位置及び進入角度を算出するロボット制御装置と、を備える、ことを特徴とするものである。
【発明の効果】
【0007】
本発明に係る自動充電システムは、充電ロボットに撮像装置及びセンサを設けることなく、ロボットアームの目標移動位置及び進入角度を算出することができるという効果を奏する。
【図面の簡単な説明】
【0008】
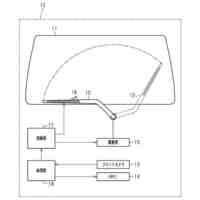
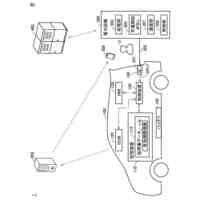
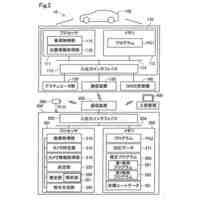
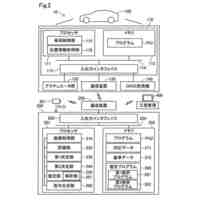
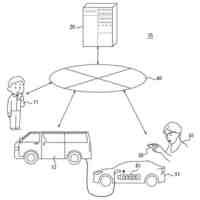
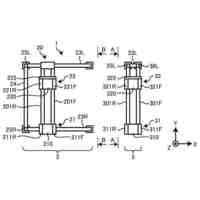
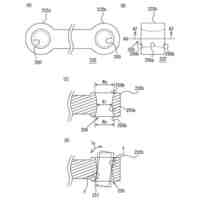
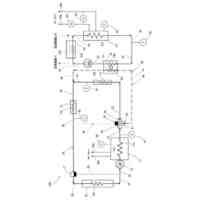
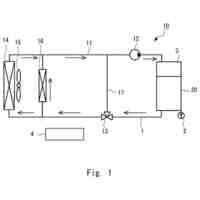
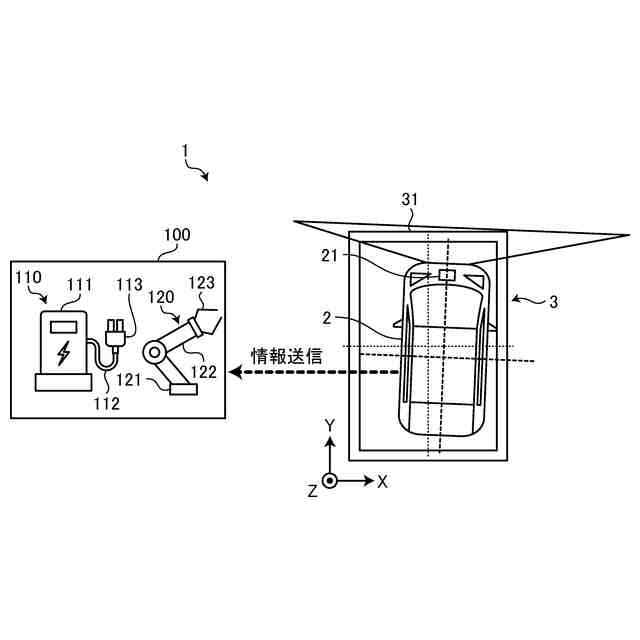
図1は、実施形態に係る自動充電システムの概略構成の一例を示す図である。
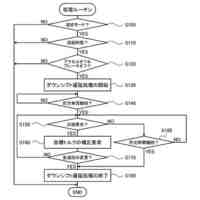
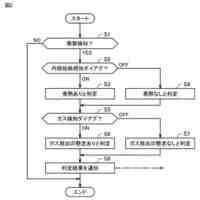
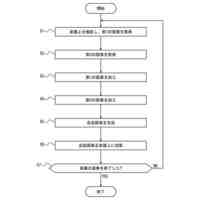
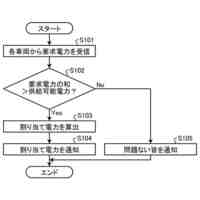
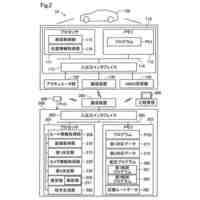
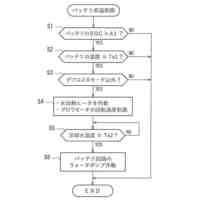
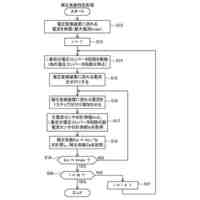
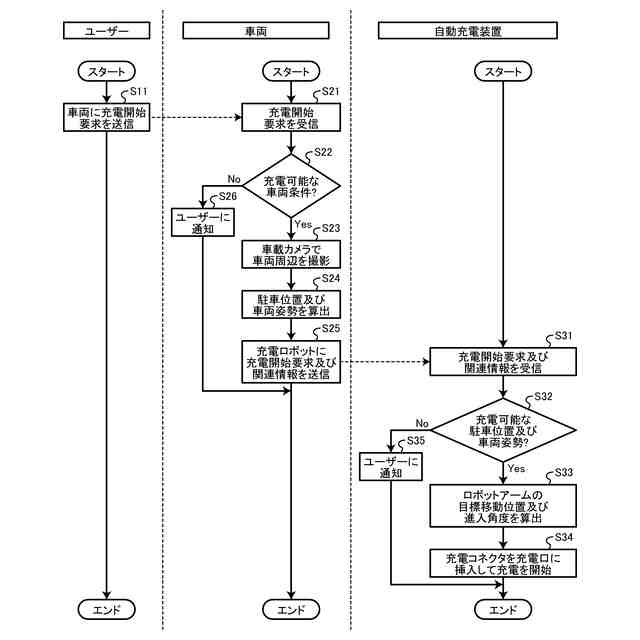
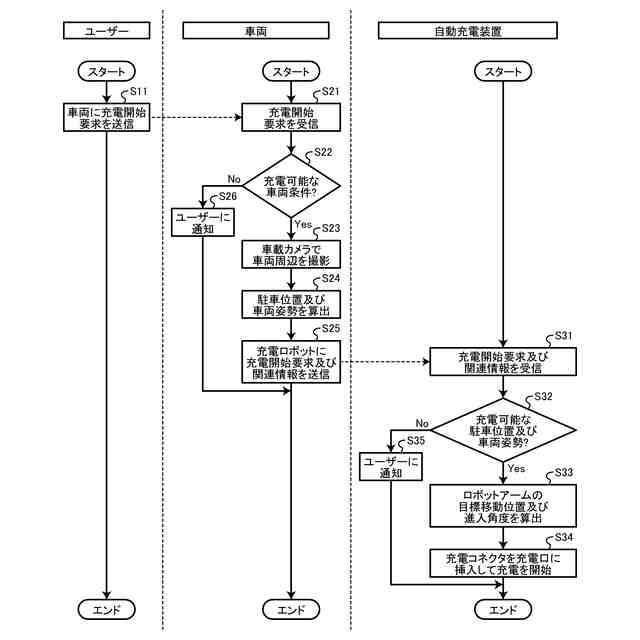
図2は、実施形態に係る自動充電制御の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下に、本発明に係る自動充電システムの実施形態について説明する。なお、本実施形態により本発明が限定されるものではない。
【0010】
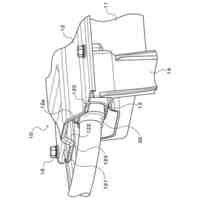
図1は、実施形態に係る自動充電システム1の概略構成の一例を示す図である。実施形態に係る自動充電システム1は、自動充電装置100及び車両2によって構成される。自動充電装置100は、充電器110及び充電ロボット120によって構成されている。充電器110は、充電器本体111、充電ケーブル112、及び、充電コネクタ113などを備えており、例えば、商用電源に接続されている。充電コネクタ113は、嵌合等の機械的な連結を伴って車両2の充電口(インレット)に挿入可能に構成されている。充電ロボット120は、ロボット本体121、ロボット本体121に接続されたロボットアーム122、ロボットアーム122の先端部に設けられたロボットハンド123、ロボット制御装置、及び、ロボット通信装置などを備えている。自動充電装置100では、充電コネクタ113をロボットハンド123で掴み、ロボットアーム122を移動させて充電コネクタ113を車両2の充電口へ挿入することによって、充電器10と車両2との間で電力伝送のための電気的な接続が確保される。これにより、充電器10から供給される電力によって車両2の車載バッテリを充電することが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
15日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車載隔壁
1日前
トヨタ自動車株式会社
二次電池
1日前
トヨタ自動車株式会社
内燃機関
15日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
制御方法
1日前
トヨタ自動車株式会社
金型装置
1日前
トヨタ自動車株式会社
内燃機関
15日前
トヨタ自動車株式会社
解析装置
15日前
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
供給装置
15日前
トヨタ自動車株式会社
積層コア
2日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
システム
1日前
トヨタ自動車株式会社
システム
1日前
トヨタ自動車株式会社
システム
1日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
電力機器
3日前
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
サーバ装置
2日前
トヨタ自動車株式会社
端子台装置
15日前
トヨタ自動車株式会社
車両用架台
3日前
トヨタ自動車株式会社
リンク機構
3日前
トヨタ自動車株式会社
車両制御装置
16日前
トヨタ自動車株式会社
配送システム
1日前
トヨタ自動車株式会社
電圧変換装置
15日前
トヨタ自動車株式会社
燃料電池車両
1日前
トヨタ自動車株式会社
電池温調装置
15日前
トヨタ自動車株式会社
ルーフラック
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ