TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024179764
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023098891
出願日
2023-06-16
発明の名称
撮像システム、方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
H04N
23/63 20230101AFI20241219BHJP(電気通信技術)
要約
【課題】
GUIを使用せずに撮像装置がループ動作する経路を決める場合においても、設定したループ動作の経路を容易に補正することを可能にすること。
【解決手段】
撮像システムは、撮像装置の撮像画角の経路を指定する移動情報を受け付けて前記撮像装置の撮像画角を移動させる操作手段と、前記移動情報により指定された前記撮像装置の撮像画角の経路である補正前経路と、前記補正前経路が補正されることにより生成された前記撮像装置の撮像画角の経路である補正後経路とを表示する表示手段と、前記移動情報に含まれている前記撮像装置の撮像画角の位置、方向及び速度の少なくとも一つに基づいて前記補正前経路を補正することにより前記補正後経路を生成する補正手段と、を備えることを特徴とする。
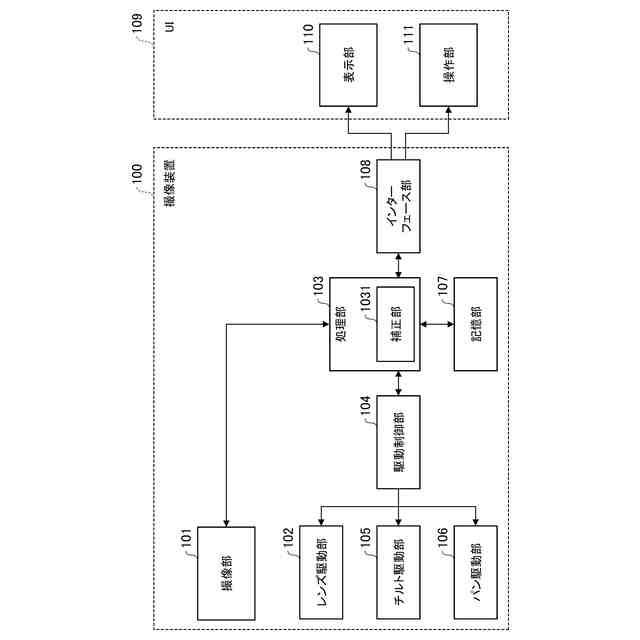
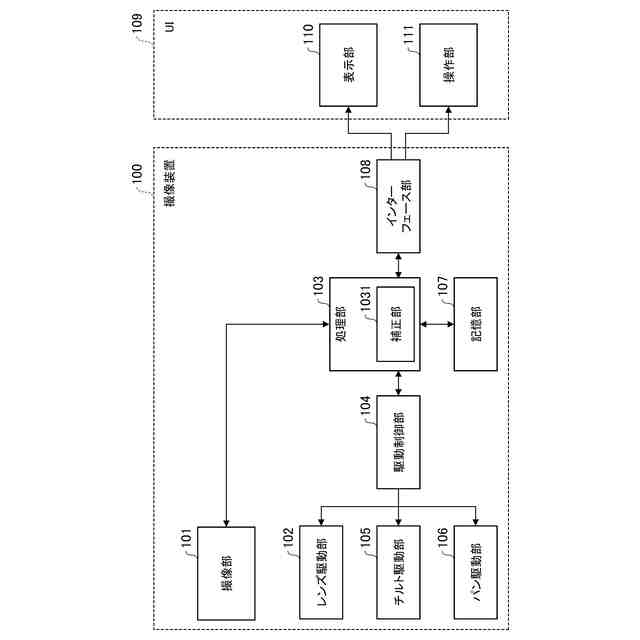
【選択図】図1
特許請求の範囲
【請求項1】
撮像装置の撮像画角の経路を指定する移動情報を受け付けて前記撮像装置の撮像画角を移動させる操作手段と、
前記移動情報により指定された前記撮像装置の撮像画角の経路である補正前経路と、前記補正前経路が補正されることにより生成された前記撮像装置の撮像画角の経路である補正後経路とを表示する表示手段と、
前記移動情報に含まれている前記撮像装置の撮像画角の位置、方向及び速度の少なくとも一つに基づいて前記補正前経路を補正することにより前記補正後経路を生成する補正手段と、
を備えることを特徴とする撮像システム。
続きを表示(約 1,000 文字)
【請求項2】
前記補正手段は、前記補正後経路の始点における撮像画角の位置と、前記補正後経路の終点における撮像画角の位置とが一致している前記補正後経路を生成する、
ことを特徴とする請求項1に記載の撮像システム。
【請求項3】
前記補正手段は、前記補正後経路の始点における撮像画角の方向と、前記補正後経路の終点における撮像画角の方向とが一致している前記補正後経路を生成する、
ことを特徴とする請求項1に記載の撮像システム。
【請求項4】
前記補正手段は、前記補正後経路の始点における撮像画角の速度と、前記補正後経路の終点における撮像画角の速度とが一致している前記補正後経路を生成する、
ことを特徴とする請求項1に記載の撮像システム。
【請求項5】
前記補正手段は、前記補正前経路の縦横比に等しい縦横比を有する前記補正後経路を生成する、
ことを特徴とする請求項1から請求項4のいずれか一つに記載の撮像システム。
【請求項6】
前記補正手段は、前記補正後経路が通過すべき点を指定するデータを受け付け、前記点を通過する前記補正後経路を生成する、
ことを特徴とする請求項1から請求項4のいずれか一つに記載の撮像システム。
【請求項7】
前記表示手段は、前記移動情報に基づいて前記撮像装置の撮像画角が移動している間に撮像された複数の画像を合成することにより生成された合成画像を表示し、前記補正前経路及び前記補正後経路の少なくとも一方を前記合成画像の上に重ねて表示する、
ことを特徴とする請求項1から請求項4のいずれか一つに記載の撮像システム。
【請求項8】
前記合成画像の上に重ねて表示された前記補正後経路における速度及び加速度の少なくとも一方が一定となるように前記撮像装置の撮像画角を移動させる駆動制御手段を更に備える、
ことを特徴とする請求項7に記載の撮像システム。
【請求項9】
前記表示手段は、前記撮像装置の撮像画角の速度を示す第一ユーザーインターフェースを更に表示する、
ことを特徴とする請求項1から請求項4のいずれか一つに記載の撮像システム。
【請求項10】
前記表示手段は、同時に複数の前記補正後経路を表示する、
ことを特徴とする請求項1から請求項4のいずれか一つに記載の撮像システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像システム、方法及びプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、省人化のために遠隔で操作可能な撮像装置が増加している。その一つに、撮像した動画像をネットワークを介して配信するライブストリーミングカメラがある。ライブストリーミングカメラのパン、チルト、ズームの駆動に関する機能の一つとして、あらかじめスイッチャ等の撮像装置へのパン、チルト、ズーム等の駆動指示を行う機器を用いて撮像装置に駆動指示を与えておき、設定した動作を繰り返し行う機能(以下、ループ動作という)が知られている。この機能はスイッチャとの接続が遮断された後でも駆動を継続するので、この機能を用いることで一台のスイッチャで複数の撮像装置の駆動を同時に行うことができる。
【0003】
このように駆動指示を与えていない間も撮像装置を駆動させる技術としては、他に、監視撮像装置等で用いられるプリセット機能がある。この機能は、あらかじめイベントや時間をトリガとして設定し、駆動経路及び駆動速度を設定して駆動させる機能である。プリセット機能を用いた駆動方法のバリエーションに関しても多くの特許文献が出されている。例えば、特許文献1では、クライアントの意図を反映した制御を行うために、グラフィカルユーザーインターフェース(GUI:Graphical User Interface)上に表示された映像と撮像装置のパン、チルト、ズーム情報とを対応付ける。そして、特許文献1では、GUI上に表示された映像から複数の点を指定し、複数の点を基に線を生成し、生成した線の軌跡に最も近似したプリセットの位置、巡回順序、駆動速度等を算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-017646号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献に開示された従来技術では、GUI上の映像を見ながら巡回位置を指定して駆動経路を決めるため、撮像装置に接続されるジョイスティック等のGUIを伴わない制御方法によって撮像装置の駆動経路を決める際に、駆動経路を修正することが出来ない。
【0006】
そこで、本発明は、GUIを使用せずに撮像装置がループ動作する経路を決める場合においても、設定したループ動作の経路を容易に補正することを可能にする撮像システム、方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明の撮像システムは、撮像装置の撮像画角の経路を指定する移動情報を受け付けて前記撮像装置の撮像画角を移動させる操作手段と、前記移動情報により指定された前記撮像装置の撮像画角の経路である補正前経路と、前記補正前経路が補正されることにより生成された前記撮像装置の撮像画角の経路である補正後経路とを表示する表示手段と、前記移動情報に含まれている前記撮像装置の撮像画角の位置、方向及び速度の少なくとも一つに基づいて前記補正前経路を補正することにより前記補正後経路を生成する補正手段と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、GUIを使用せずに撮像装置がループ動作する経路を決める場合においても、設定したループ動作の経路を容易に補正することを可能にすることができる。
【図面の簡単な説明】
【0009】
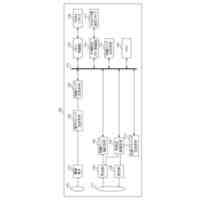
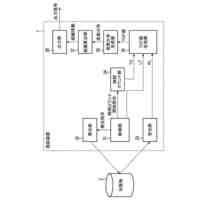
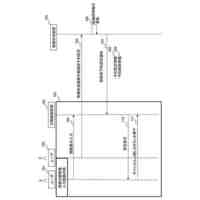
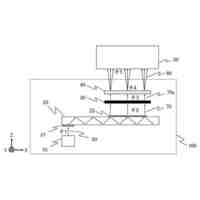
実施形態に係る撮像システムの構成の例を示すブロック図である。
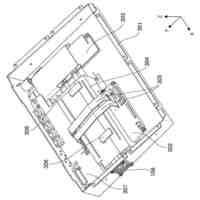
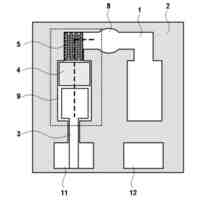
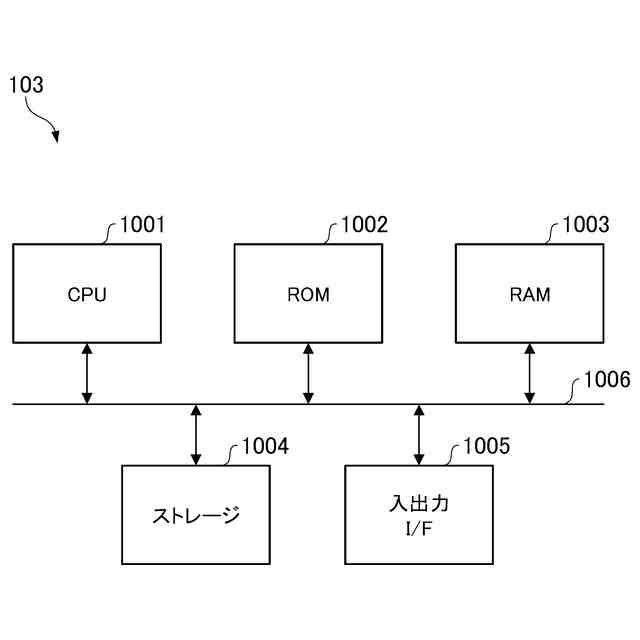
実施形態に係る処理部のハードウェア構成の例を示すブロック図である。
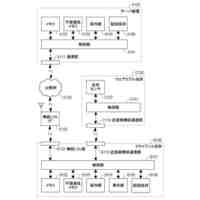
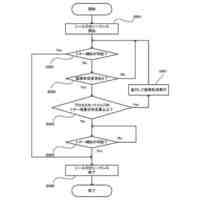
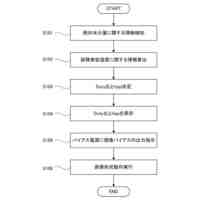
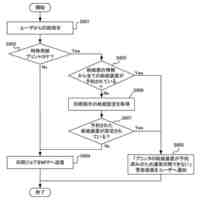
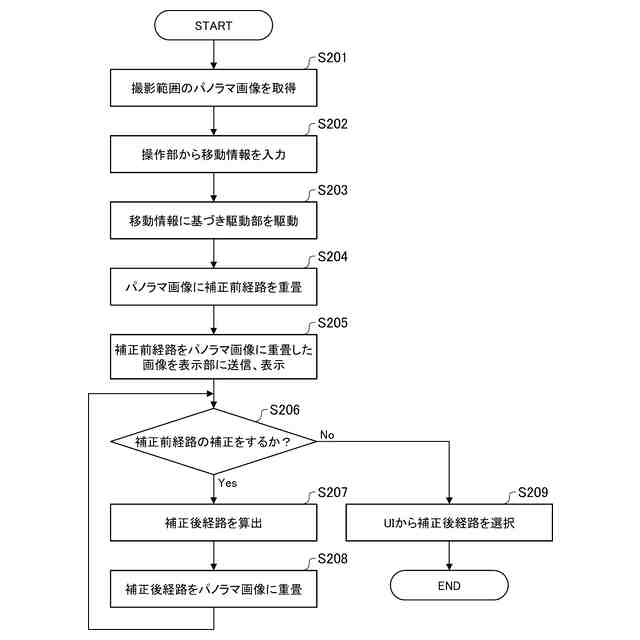
実施形態に係る撮像システムが補正前経路を補正して補正後経路を生成し、補正後経路を表示部に表示する処理の例を示すフローチャートである。
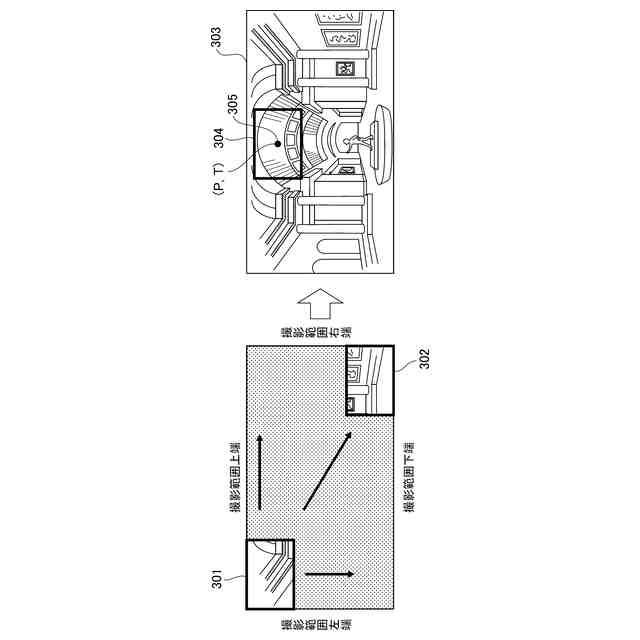
実施形態に係る合成画像が生成される処理の例を示す図である。
実施形態に係る表示部に表示された合成画像及び補正前経路の例を示す図である。
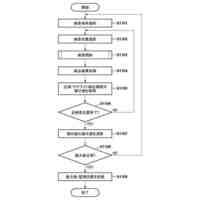
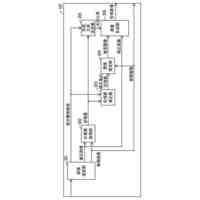
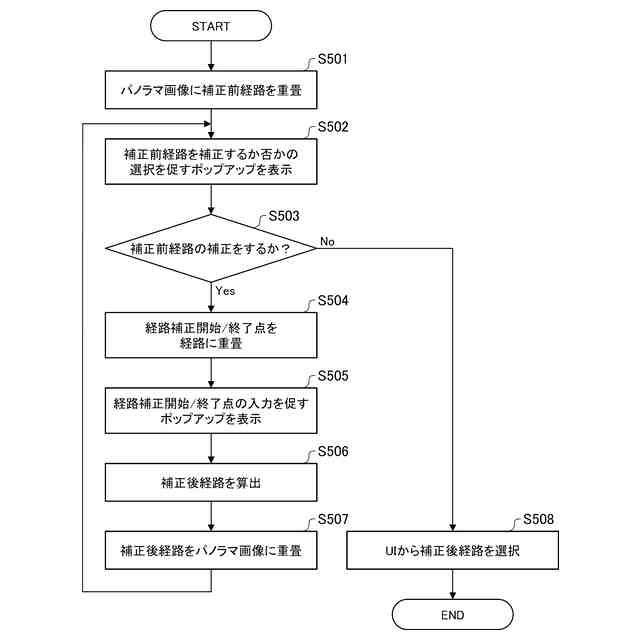
実施形態に係る表示部に補正後経路が表示される処理の例を示すフローチャートである。
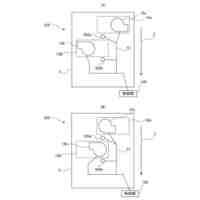
実施形態に係る補正後経路が生成される場合に表示部に表示される画面の例を示す図である。
実施形態に係る補正後経路が生成される場合に表示部に表示される画面の例を示す図である。
実施形態に係る補正後経路が生成される場合に表示部に表示される画面の例を示す図である。
実施形態に係る撮像装置の撮像画角の位置を補正する処理の例を示す図である。
実施形態に係るUI上で実行される手動位置補正を説明するための図である。
実施形態に係るUI上で実行される手動位置補正を説明するための図である。
実施形態に係るUI上で実行される手動位置補正を説明するための図である。
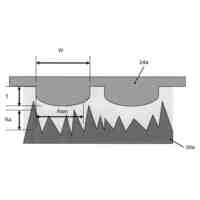
実施形態に係る撮像システムが撮像装置の撮像画角の速度を補正する場合における撮像装置と被写体との位置関係の例を示す図である。
実施形態に係る撮像装置の撮像画角の速度を補正する方法及び撮像装置の撮像画角の速度を表示する方法の例を示す図である。
実施形態に係る撮像装置の撮像画角の速度を補正する方法及び撮像装置の撮像画角の速度を表示する方法の例を示す図である。
実施形態に係る撮像装置の撮像画角の速度を補正する方法及び撮像装置の撮像画角の速度を表示する方法の例を示す図である。
実施形態に係る撮像装置の撮像画角の速度を補正する方法及び撮像装置の撮像画角の速度を表示する方法の例を示す図である。
【発明を実施するための形態】
【0010】
以下に、本発明の好ましい実施形態を、図面を参照しながら詳細に説明する。なお、以下の実施形態において示す構成は一例に過ぎず、本発明は、以下で説明される構成に限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
印刷装置
15日前
キヤノン株式会社
乾燥装置
9日前
キヤノン株式会社
検出装置
8日前
キヤノン株式会社
乾燥装置
22日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
定着装置
3日前
キヤノン株式会社
測距装置
22日前
キヤノン株式会社
測距装置
15日前
キヤノン株式会社
現像装置
15日前
キヤノン株式会社
記録装置
8日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
電子機器
15日前
キヤノン株式会社
通信装置
15日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
光学機器
22日前
キヤノン株式会社
露光ヘッド
1日前
キヤノン株式会社
防水構造体
8日前
キヤノン株式会社
分析デバイス
1日前
キヤノン株式会社
画像記録方法
16日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
記録素子基板
1日前
キヤノン株式会社
印刷制御装置
15日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像表示装置
3日前
キヤノン株式会社
情報処理装置
16日前
キヤノン株式会社
分析デバイス
2日前
キヤノン株式会社
情報処理装置
3日前
キヤノン株式会社
画像処理装置
10日前
キヤノン株式会社
画像形成装置
22日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
振動波モータ
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ