TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024177839
公報種別
公開特許公報(A)
公開日
2024-12-24
出願番号
2023096203
出願日
2023-06-12
発明の名称
ロボットシステムおよびワークの処理方法
出願人
株式会社IHI
代理人
弁理士法人青海国際特許事務所
主分類
B25J
13/00 20060101AFI20241217BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットに要求される出力を低減すること。
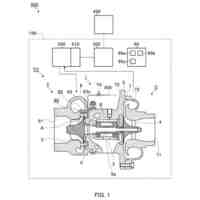
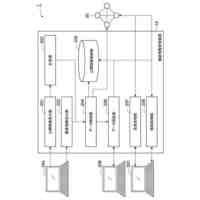
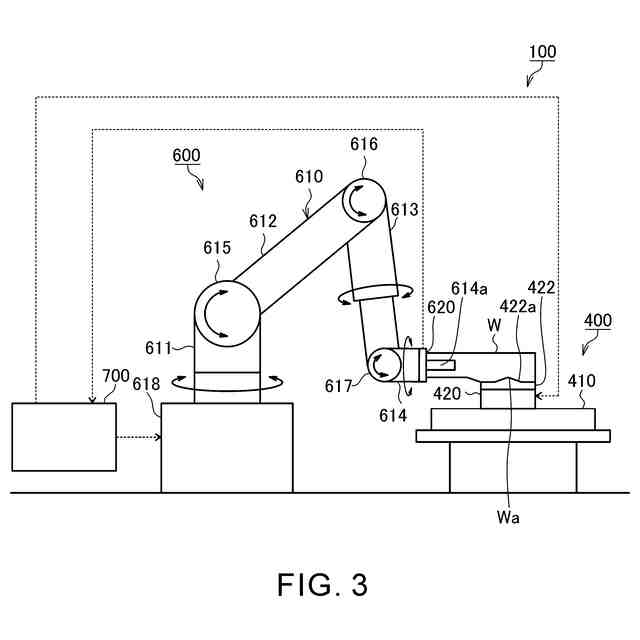
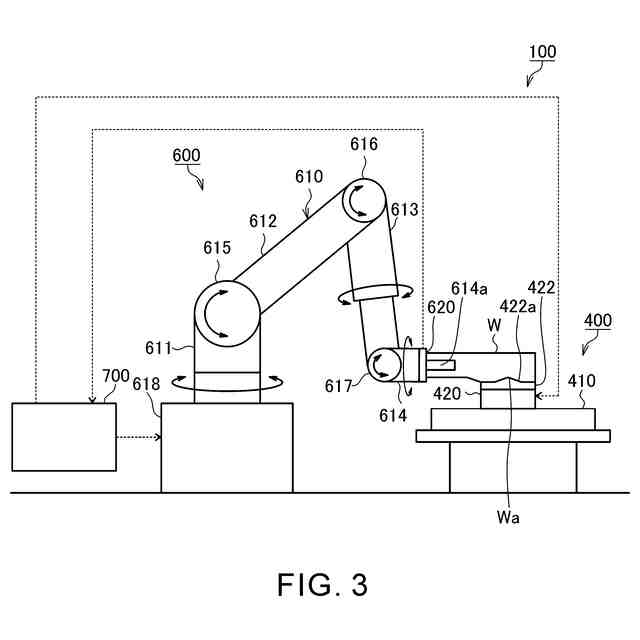
【解決手段】ロボットシステム100は、ワークWを把持可能なロボットアーム610を有するロボット600と、ロボットアーム610の動作を制御する制御装置700と、を備え、制御装置700は、ロボットアーム610がワークWを把持した状態でワークWを接地面に接触させることと、ロボットアーム610に外力が作用する第1の方向にロボットアーム610を移動可能に制御することと、少なくとも第1の方向、および、第1の方向と反対方向である第2の方向以外の方向についてロボットアーム610の移動を制限するように制御することと、を実行し、外力は、第1の方向の分力である第1分力が、第1の方向に直交する方向の分力である第2分力よりも大きい。
【選択図】図3
特許請求の範囲
【請求項1】
ワークを把持可能なロボットアームを有するロボットと、
前記ロボットアームの動作を制御する制御装置と、
を備え、
前記制御装置は、
前記ロボットアームが前記ワークを把持した状態で前記ワークを接地面に接触させることと、
前記ロボットアームに外力が作用する第1の方向に前記ロボットアームを移動可能に制御することと、
少なくとも前記第1の方向、および、前記第1の方向と反対方向である第2の方向以外の方向について前記ロボットアームの移動を制限するように制御することと、
を実行し、
前記外力は、前記第1の方向の分力である第1分力が、前記第1の方向に直交する方向の分力である第2分力よりも大きい、
ロボットシステム。
続きを表示(約 900 文字)
【請求項2】
前記接地面は、変形可能に構成されている、
請求項1に記載のロボットシステム。
【請求項3】
前記接地面は、前記ワークの外形形状に応じて変形可能に構成されている、
請求項2に記載のロボットシステム。
【請求項4】
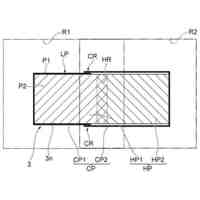
前記ワークを前記接地面と異なる2面で挟持する挟持面を備え、
前記挟持面は、前記ワークの外形形状に応じて変形可能に構成されている、
請求項1または2に記載のロボットシステム。
【請求項5】
ロボットアームにワークを把持させるステップと、
前記ロボットアームが前記ワークを把持した状態で前記ワークを接地面に接触させるステップと、
前記ワークを接地面に接触させるステップの後、前記ロボットアームに外力が作用する第1の方向に前記ロボットアームを移動可能に制御しつつ、少なくとも前記第1の方向、および、前記第1の方向と反対方向である第2の方向以外の方向について前記ロボットアームの移動を制限する第1制御モードで前記ロボットアームを制御するステップと、
前記第1制御モードで前記ロボットアームを制御するステップの後、前記ロボットアームが前記ワークを把持した状態で、前記ワークに対し前記外力を作用させる処理を実行するステップと、
を含み、
前記外力は、前記第1の方向の分力である第1分力が、前記第1の方向に直交する方向の分力である第2分力よりも大きい、
ワークの処理方法。
【請求項6】
前記ワークに対し前記外力を作用させる処理を実行するステップの後、前記ワークの搬送方向以外の方向について前記ロボットアームの移動を制限する第2制御モードで前記ロボットアームを制御するステップと、
前記第2制御モードで前記ロボットアームを制御するステップの後、前記ロボットアームが前記ワークを把持した状態で前記ワークの姿勢を変え、前記ワークを前記接地面に接触させるステップと、
を含む、
請求項5に記載のワークの処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステムおよびワークの処理方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、載置台に載置されたワークを別の載置台に移動させるため、ワークを保持するロボットアームが活用されている。例えば、特許文献1には、載置台に載置されたワークを第1保持部と第2保持部との間で挟持して持ち上げ、別の載置台に向けて移動させた後、下降することでワークを別の載置台に載置するロボットアームについて開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-168834号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ロボットアームがワークを保持した状態でワークに対し処理を行う場合、ロボットアームは、ワークの処理中に加えられる外力以上の力を発生可能に構成する必要がある。しかし、その場合、ロボットアームがワークに加えられる外力以上の力を発生させるために、高出力の大型ロボットが必要になるという課題がある。
【0005】
本開示の目的は、ロボットに要求される出力を低減することが可能なロボットシステムおよびワークの処理方法を提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示のロボットシステムは、ワークを把持可能なロボットアームを有するロボットと、ロボットアームの動作を制御する制御装置と、を備え、制御装置は、ロボットアームがワークを把持した状態でワークを接地面に接触させることと、ロボットアームに外力が作用する第1の方向にロボットアームを移動可能に制御することと、少なくとも第1の方向、および、第1の方向と反対方向である第2の方向以外の方向についてロボットアームの移動を制限するように制御することと、を実行し、外力は、第1の方向の分力である第1分力が、第1の方向に直交する方向の分力である第2分力よりも大きい。
【0007】
接地面は、変形可能に構成されていてもよい。
【0008】
接地面は、ワークの外形形状に応じて変形可能であってもよい。
【0009】
ワークを接地面と異なる2面で挟持する挟持面を備え、挟持面は、ワークの外形形状に応じて変形可能であってもよい。
【0010】
上記課題を解決するために、本開示のワークの処理方法は、ロボットアームにワークを把持させるステップと、ロボットアームがワークを把持した状態でワークを接地面に接触させるステップと、ワークを接地面に接触させるステップの後、ロボットアームに外力が作用する第1の方向にロボットアームを移動可能に制御しつつ、少なくとも第1の方向、および、第1の方向と反対方向である第2の方向以外の方向についてロボットアームの移動を制限する第1制御モードでロボットアームを制御するステップと、第1制御モードでロボットアームを制御するステップの後、ロボットアームがワークを把持した状態で、ワークに対し外力を作用させる処理を実行するステップと、を含み、外力は、第1の方向の分力である第1分力が、第1の方向に直交する方向の分力である第2分力よりも大きい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社IHI
過給機
1か月前
株式会社IHIインフラシステム
吊足場
1か月前
株式会社IHI
エンジン
1か月前
株式会社IHI
ブラストガン
11日前
株式会社IHI
吸排気システム
1か月前
株式会社IHIインフラシステム
架設材固定構造
1か月前
株式会社IHI
電動機システム
1か月前
株式会社IHI
吸排気システム
1か月前
株式会社IHI
炭素剥離システム
1か月前
株式会社IHI
半導体モジュール
1か月前
株式会社IHI
ステータ及び電動機
1か月前
株式会社IHI
燃焼器および燃焼方法
1か月前
株式会社IHI
車両用の充電システム
4日前
株式会社IHI
インレットガイドベーン
1か月前
株式会社IHI建材工業
コンクリート部材の継手構造
11日前
株式会社IHI検査計測
渦電流検査装置と渦電流検査方法
1か月前
株式会社IHI
炭素生成システム及び炭素生成方法
4日前
株式会社IHI
緩衝材検出装置及び緩衝材検出方法
25日前
株式会社IHI
炭素生成システム及び炭素生成方法
4日前
株式会社IHI
積層造形装置及び未溶融部を冷却する方法
1か月前
株式会社IHI
搬送システム、搬送用治具および搬送方法
1か月前
株式会社IHI
溶接部にかかる応力を評価するための方法
1か月前
株式会社IHI
電動機、電力変換装置及び電動機システム
1か月前
株式会社IHI建材工業
組立式コンクリート建物及びその組立方法
11日前
株式会社IHI
マルチレベルインバータ、及び電動機システム
1か月前
株式会社IHI
積層造形装置、積層造形方法、及びプログラム
25日前
株式会社IHI
気液接触装置
1か月前
株式会社IHI
価値情報登録装置、価値情報登録方法、及び価値情報登録プログラム
1か月前
株式会社IHI
スラストフォイル軸受
4日前
株式会社IHIアグリテック
農業資材散布コントローラおよび農業資材散布コントローラを搭載した農作業機
1か月前
株式会社IHI
ウィービング動作の再生情報生成装置、溶接システム、およびウィービング動作の再生情報生成方法
1か月前
株式会社IHI
エネルギビームの照射位置を調整する方法、エネルギビームの照射位置を調整するプログラム及び積層造形装置
26日前
個人
腰袋
18日前
株式会社マキタ
電動工具
26日前
株式会社マキタ
電動工具
11日前
日本車輌製造株式会社
締め付け工具
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ