TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176251
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094678
出願日
2023-06-08
発明の名称
FMCWサーボスロープレーダ信号処理装置及びプログラム
出願人
日本無線株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
7/40 20060101AFI20241212BHJP(測定;試験)
要約
【課題】本開示は、飛翔体等の移動体に搭載されるジャイロセンサとは独立して、FMCWサーボスロープレーダ信号処理装置の機能として、受信波のドップラシフトを考慮して、地表面等の目標距離を補正することを目的とする。
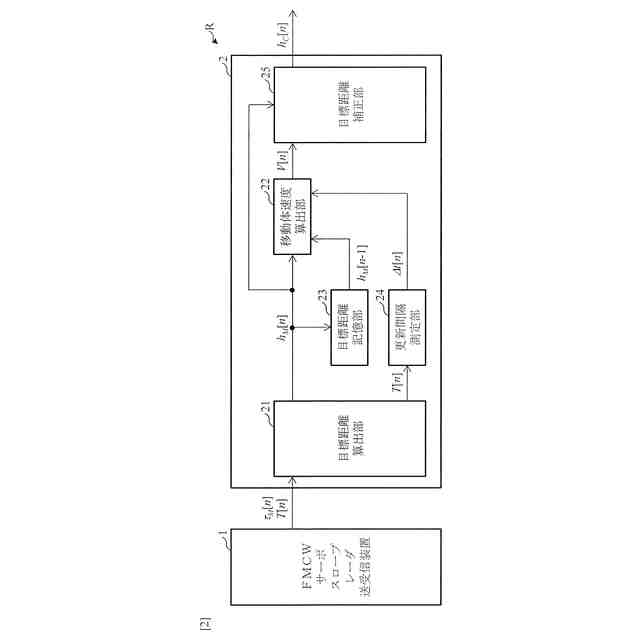
【解決手段】本開示は、地表面等の目標距離の所定期間の時間変化に基づいて、FMCWサーボスロープレーダ送受信装置1が搭載される飛翔体等の移動体の速度成分のうちの、FMCWサーボスロープレーダ送受信装置1の電波発射方向と平行な速度成分を算出する移動体速度算出部22を備え、移動体速度算出部22は、飛翔体等の移動体の電波発射方向と平行な速度成分による受信波のドップラシフトが、地表面等の目標距離の算出(そして飛翔体等の移動体の電波発射方向と平行な速度成分の算出)に及ぼす影響を考慮することを特徴とするFMCWサーボスロープレーダ信号処理装置2である。
【選択図】図2
特許請求の範囲
【請求項1】
FMCW(Frequency-Modulation Continuous-Wave)サーボスロープ方式を用いて、目標物とFMCWサーボスロープレーダ送受信装置との間の目標距離を測定するFMCWサーボスロープレーダ信号処理装置であって、
前記FMCWサーボスロープレーダ送受信装置からの送信波と前記目標物からの受信波との間の遅延時間に基づいて、前記目標距離を算出する目標距離算出部と、
前記目標距離の所定期間の時間変化に基づいて、前記FMCWサーボスロープレーダ送受信装置が搭載される移動体の速度成分のうちの、前記FMCWサーボスロープレーダ送受信装置の電波発射方向と平行な速度成分を算出する移動体速度算出部と、
を備え、前記移動体速度算出部は、前記移動体の前記電波発射方向と平行な速度成分による前記受信波のドップラシフトが、前記目標距離の算出に及ぼす影響を考慮する
ことを特徴とするFMCWサーボスロープレーダ信号処理装置。
続きを表示(約 1,000 文字)
【請求項2】
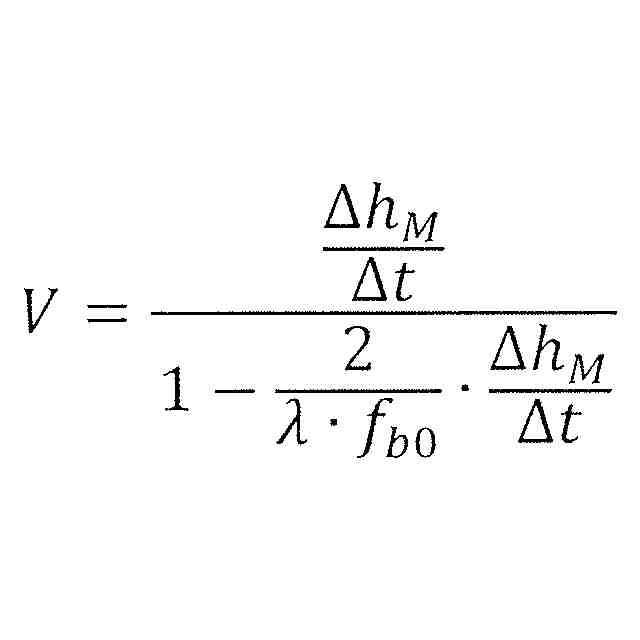
前記移動体速度算出部は、前記目標距離h
M
の所定期間Δtの時間変化Δh
M
/Δtに基づいて、前記移動体の前記電波発射方向と平行な速度成分Vを
TIFF
2024176251000014.tif
27
170
のように算出する(ただし、λは、前記送信波の波長であり、f
b0
は、一定周波数にフィードバック制御される前記送信波と前記受信波との間のビート周波数である。)
ことを特徴とする、請求項1に記載のFMCWサーボスロープレーダ信号処理装置。
【請求項3】
前記移動体の前記電波発射方向と平行な速度成分による前記受信波のドップラシフトを考慮して、前記目標距離を補正する目標距離補正部、をさらに備える
ことを特徴とする、請求項1に記載のFMCWサーボスロープレーダ信号処理装置。
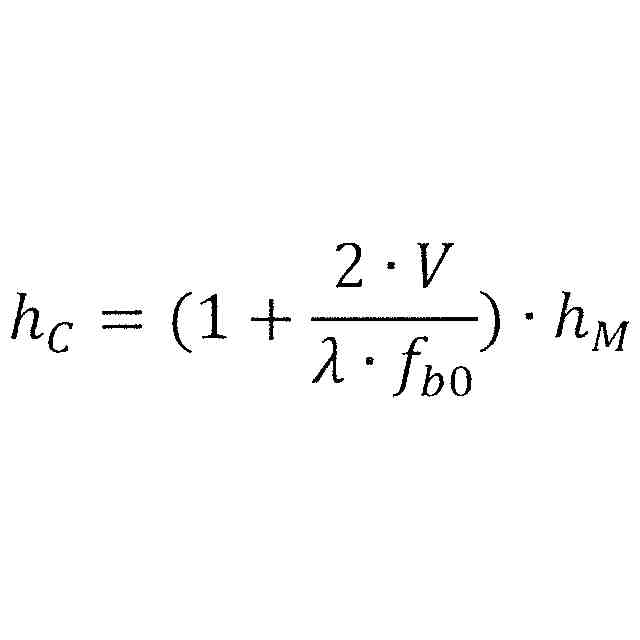
【請求項4】
前記目標距離補正部は、前記移動体の前記電波発射方向と平行な速度成分Vによる前記受信波のドップラシフトを考慮して、前記目標距離を補正前のh
M
から補正後のh
C
へと
TIFF
2024176251000015.tif
17
170
のように補正する(ただし、λは、前記送信波の波長であり、f
b0
は、一定周波数にフィードバック制御される前記送信波と前記受信波との間のビート周波数である。)
ことを特徴とする、請求項3に記載のFMCWサーボスロープレーダ信号処理装置。
【請求項5】
前記移動体速度算出部は、前記移動体の前記電波発射方向と平行な速度成分が、前記移動体の前記電波発射方向と平行な想定速度の範囲外であるときに、前記移動体の前記電波発射方向と平行な速度成分をマスキングする又はスムージングする
ことを特徴とする、請求項1に記載のFMCWサーボスロープレーダ信号処理装置。
【請求項6】
請求項1から5のいずれかに記載のFMCWサーボスロープレーダ信号処理装置が備える各処理部の各処理ステップを、前記FMCWサーボスロープレーダ信号処理装置としてのコンピュータに実行させるためのFMCWサーボスロープレーダ信号処理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、FMCW(Frequency-Modulation Continuous-Wave)サーボスロープ方式を用いて、目標物とFMCWサーボスロープレーダ送受信装置との間の目標距離を測定する技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
FMCWサーボスロープ方式を用いて、目標物とFMCWサーボスロープレーダ送受信装置との間の目標距離を測定する技術が、特許文献1、2等に開示されている。特許文献1、2では、特に地表面等の目標距離を測定する電波高度計が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-185661号公報
特開平06-168028号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
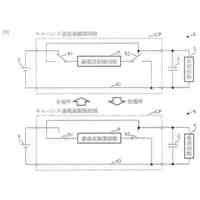
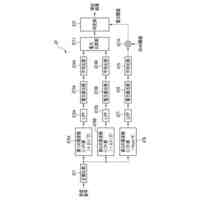
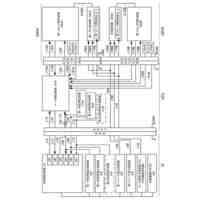
従来技術のFMCWサーボスロープレーダシステムの構成を図1に示す。従来技術のFMCWサーボスロープレーダシステムRは、FMCWサーボスロープレーダ送受信装置1、FMCWサーボスロープレーダ信号処理装置2及びFMCWサーボスロープレーダ上位装置3を備える。FMCWサーボスロープレーダ送受信装置1は(FMCWサーボスロープレーダシステムR全体も)、飛翔体等の移動体に搭載される。FMCWサーボスロープレーダ信号処理装置2は、目標距離算出部21を備える。FMCWサーボスロープレーダ上位装置3は、ジャイロセンサ31及び目標距離補正部32を備える。
【0005】
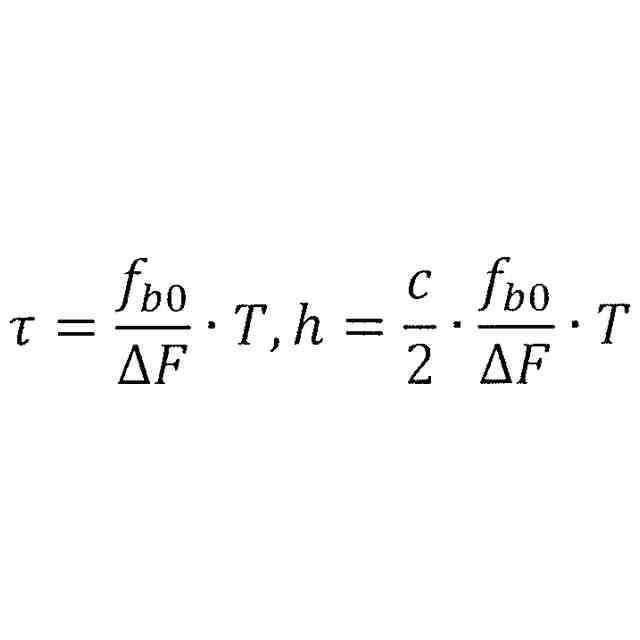
目標距離算出部21は、FMCWサーボスロープレーダ送受信装置1からの送信波と地表面等の目標物からの受信波との間の遅延時間τ
M
[n]に基づいて、地表面等の目標距離h
M
[n]を算出する(後述の数4を参照)。ジャイロセンサ31は、飛翔体等の移動体の速度成分のうちの、FMCWサーボスロープレーダ送受信装置1の電波発射方向と平行な速度成分V[n]を算出する。目標距離補正部32は、飛翔体等の移動体の電波発射方向と平行な速度成分V[n]による受信波のドップラシフトを考慮して、地表面等の目標距離をh
M
[n]からh
C
[n]へと補正する(後述の数12を参照)。
【0006】
しかし、ジャイロセンサ31が飛翔体等の移動体に搭載されるとしても、ジャイロセンサ31とは独立して、FMCWサーボスロープレーダ信号処理装置2の機能として、受信波のドップラシフトを考慮して、地表面等の目標距離を補正する要望が考えられる。
【0007】
そこで、前記課題を解決するために、本開示は、飛翔体等の移動体に搭載されるジャイロセンサとは独立して、FMCWサーボスロープレーダ信号処理装置の機能として、受信波のドップラシフトを考慮して、地表面等の目標距離を補正することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、地表面等の目標距離の所定期間の時間変化に基づいて、飛翔体等の移動体の速度成分のうちの、FMCWサーボスロープレーダ送受信装置の電波発射方向と平行な速度成分を算出する。ここで、飛翔体等の移動体の電波発射方向と平行な速度成分による受信波のドップラシフトが、地表面等の目標距離の算出(そして飛翔体等の移動体の電波発射方向と平行な速度成分の算出)に及ぼす影響を考慮する。
【0009】
具体的には、本開示は、FMCWサーボスロープ方式を用いて、目標物とFMCWサーボスロープレーダ送受信装置との間の目標距離を測定するFMCWサーボスロープレーダ信号処理装置であって、前記FMCWサーボスロープレーダ送受信装置からの送信波と前記目標物からの受信波との間の遅延時間に基づいて、前記目標距離を算出する目標距離算出部と、前記目標距離の所定期間の時間変化に基づいて、前記FMCWサーボスロープレーダ送受信装置が搭載される移動体の速度成分のうちの、前記FMCWサーボスロープレーダ送受信装置の電波発射方向と平行な速度成分を算出する移動体速度算出部と、を備え、前記移動体速度算出部は、前記移動体の前記電波発射方向と平行な速度成分による前記受信波のドップラシフトが、前記目標距離の算出に及ぼす影響を考慮することを特徴とするFMCWサーボスロープレーダ信号処理装置である。
【0010】
この構成によれば、飛翔体等の移動体に搭載されるジャイロセンサとは独立して、FMCWサーボスロープレーダ信号処理装置の機能として、受信波のドップラシフトを考慮して、飛翔体等の移動体の電波発射方向と平行な速度成分を算出することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本無線株式会社
キャパシタ過電流制限回路
2日前
日本無線株式会社
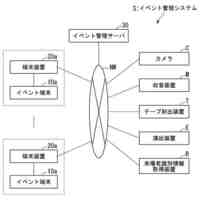
イベント管理システム、イベント管理方法
17日前
日本無線株式会社
位相同期ループ回路及びフェーズドアレイアンテナ
18日前
日本無線株式会社
衛星信号受信機及び衛星信号受信機における測位方法
2日前
日本無線株式会社
燃料切替支援システム、燃料切替支援方法、プログラム
11日前
日本無線株式会社
無線受信装置およびバースト検出方法
9日前
個人
粒子分析装置
2日前
個人
アクセサリー型テスター
3日前
日本精機株式会社
位置検出装置
19日前
株式会社ミツトヨ
画像測定機
4日前
栄進化学株式会社
浸透探傷用濃縮液
9日前
株式会社テイエルブイ
振動検出装置
2日前
東レ株式会社
シート状物の検査方法
17日前
エイブリック株式会社
電流検出回路
16日前
株式会社チノー
放射光測温装置
16日前
東ソー株式会社
自動分析装置及び方法
19日前
ダイハツ工業株式会社
試料セル
2日前
大和製衡株式会社
計量装置
9日前
株式会社 キョーワ
食品搬送装置
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
トヨタ自動車株式会社
電気自動車
3日前
株式会社熊谷組
計測システム
9日前
日本碍子株式会社
ガスセンサ
16日前
富士電機株式会社
エンコーダ
17日前
理研計器株式会社
ガス検出器
4日前
大成建設株式会社
画像表示システム
12日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
株式会社ニコン
検出装置
2日前
株式会社 システムスクエア
検査装置
10日前
株式会社デンソー
試験装置
12日前
東洋計器株式会社
超音波式流量計
9日前
株式会社ヨコオ
シートコンタクタ
19日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ