TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024173467
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091906
出願日
2023-06-02
発明の名称
距離測定装置および距離測定方法
出願人
日本製鉄株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G01S
13/536 20060101AFI20241205BHJP(測定;試験)
要約
【課題】周囲に構造物がある場合でも、安定して測定対象物までの距離を計測することができるようにする。
【解決手段】所定回数のチャープ波形からなるマイクロ波を測定対象物の移動方向に対して傾いた方向から送信して、測定対象物を含む物体からの反射波を受信し、反射波と送信波に基づく参照波とから得られる所定回数分のビート波に対応する関数をフーリエ変換することで、物体までの距離と第1フーリエスペクトルを算出し、所定回数分の第1フーリエスペクトルを時間軸に並べてフーリエ変換することで、物体の速度と第2フーリエスペクトルを算出し、物体までの距離と物体の速度とを軸とした第2フーリエスペクトルの絶対値を示す図において、物体の速度が0となる位置を挟んで絶対値が非対称となる位置に基づいて、速度成分を持つ測定対象物までの距離を算出する。
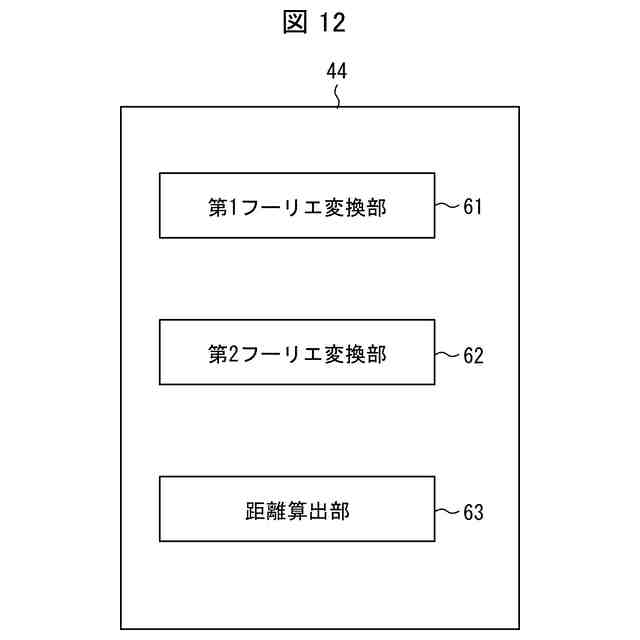
【選択図】図12
特許請求の範囲
【請求項1】
マイクロ波を用いて、移動する測定対象物までの距離を測定する距離測定装置であって、
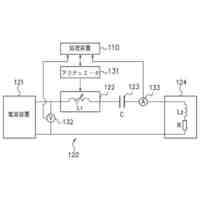
予め決められた掃引時間の間に、予め決められた掃引周波数だけ周波数が線形に変化する波形を1回のチャープ波形であるとした場合に、所定回数のチャープ波形からなるマイクロ波を発振する発振部と、
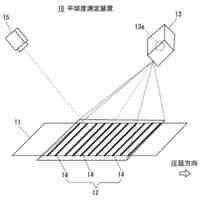
前記測定対象物の移動方向に対して傾いた方向から、前記測定対象物に向けて、前記所定回数のチャープ波形からなるマイクロ波を送信波として送信する送信アンテナと、
前記送信波が前記測定対象物を含む物体に当たって反射することで生じた反射波を受信する受信アンテナと、
前記測定対象物までの距離を算出する演算処理部と、
を有し、
前記演算処理部は、
前記反射波と前記送信波に基づく参照波とから得られる前記所定回数分のビート波に対応する関数をフーリエ変換することで、前記物体までの距離に対応する周波数と、前記物体までの距離と、前記所定回数分のビート波に対応する関数のフーリエスペクトルである第1フーリエスペクトルと、を算出する第1フーリエ変換部と、
前記所定回数分のビート波のそれぞれに対応する前記第1フーリエスペクトルを時間軸に並べて、前記物体までの距離に対応する周波数ごとにフーリエ変換することで、前記物体までの距離ごとに、前記物体の速度と、前記第1フーリエスペクトルのフーリエスペクトルである第2フーリエスペクトルと、を算出する第2フーリエ変換部と、
前記物体までの距離と前記物体の速度とを各軸とした、前記第2フーリエスペクトルの絶対値を示す図において、前記物体の速度が0となる位置を挟んで前記第2フーリエスペクトルの絶対値が非対称となる位置を特定し、
前記非対称となる位置に対応する前記物体までの距離に基づいて、前記測定対象物までの距離を算出する距離算出部と、
を有する、距離測定装置。
続きを表示(約 1,000 文字)
【請求項2】
前記距離測定装置の距離分解能は、前記発振部の発振するマイクロ波の掃引周波数によって定まり、
所定回数分のチャープ波形からなるマイクロ波が発振される時間の前記測定対象物の移動距離が、前記距離分解能に対応する距離未満となるように、前記マイクロ波の掃引周波数と、掃引時間とが設定される、請求項1に記載の距離測定装置。
【請求項3】
マイクロ波を用いて、移動する測定対象物までの距離を測定する距離測定方法であって、
予め決められた掃引時間の間に、予め決められた掃引周波数だけ周波数が線形に変化する波形を1回のチャープ波形であるとした場合に、所定回数のチャープ波形からなるマイクロ波を発振する発振ステップと、
前記測定対象物の移動方向に対して傾いた方向から、前記測定対象物に向けて、前記所定回数のチャープ波形からなるマイクロ波を送信波として送信する送信ステップと、
前記送信波が前記測定対象物を含む物体に当たって反射することで生じた反射波を受信する受信ステップと、
前記測定対象物までの距離を算出する演算処理ステップと、
を有し、
前記演算処理ステップは、
前記反射波と前記送信波に基づく参照波とから得られる前記所定回数分のビート波に対応する関数をフーリエ変換することで、前記物体までの距離に対応する周波数と、前記物体までの距離と、前記所定回数分のビート波に対応する関数のフーリエスペクトルである第1フーリエスペクトルと、を算出する第1フーリエ変換ステップと、
前記所定回数分のビート波のそれぞれに対応する前記第1フーリエスペクトルを時間軸に並べて、前記物体までの距離に対応する周波数ごとにフーリエ変換することで、前記物体までの距離ごとに、前記物体の速度と、前記第1フーリエスペクトルのフーリエスペクトルである第2フーリエスペクトルと、を算出する第2フーリエ変換ステップと、
前記物体までの距離と前記物体の速度とを各軸とした、前記第2フーリエスペクトルの絶対値を示す図において、前記物体の速度が0となる位置を挟んで前記第2フーリエスペクトルの絶対値が非対称となる位置を特定し、
前記非対称となる位置に対応する前記物体までの距離に基づいて、前記測定対象物までの距離を算出する距離算出ステップと、
を有する、距離測定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、距離測定装置および距離測定方法に関し、周囲に構造物がある場合でも、安定して測定対象物までの距離を計測することができるようにする距離測定装置および距離測定方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
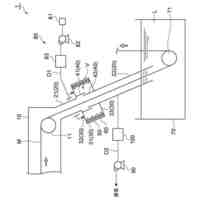
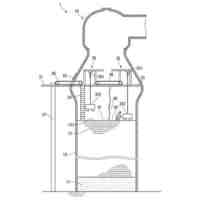
連続鋳造機におけるスラブの製造では、目標通りの幅をもったスラブとなるように適宜設定を行ったうえで製造を行うが、鋳型から流れ出た溶鋼が凝固する過程で、スラブが幅方向に膨らむバルジングという現象が起こることがある。鋳型を制御して目標のスラブ幅を実現するためにはバルジングによるスラブ幅の増大量を製造プロセスの初期段階で計測し、操業にフィードバックすることが求められる。
【0003】
例えば、スラブを挟む既知の位置に2つのセンサを設置し、それぞれのセンサでセンサからスラブまでの距離を計測し、センサを設置した位置間の距離から、それぞれのセンサとスラブまでの距離を差し引くことで、製造プロセス中のスラブ幅を計測することが可能となる。
【0004】
連続鋳造機の鋳型付近はスラブ材の温度が高いため蒸気が多く発生するが、波長が短いレーザー光では蒸気を透過できずスラブからの反射信号を安定して受信することが困難である。そこで波長が長いマイクロ波を用いた計測方式が注目されている。
【0005】
例えば、特許文献1では、FMCW(周波数変調連続波)レーダでスラブ側面からの反射波を利用し、反射強度によりスラブが搬送ロール上に有る時間を測定する。
【先行技術文献】
【特許文献】
【0006】
特開2022-149473
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に示される方式は、スラブからの反射信号を検知する時間の長さと搬送ロールの回転速度からスラブ長を計測するのであって、センサからスラブまでの距離を計測するものではない。
【0008】
また、連続鋳造機におけるスラブの製造では、周囲を構造物に囲まれた環境の中で、スラブが搬送される。このため、マイクロ波を用いた計測を行う場合、マイクロ波は進行方向に広がりつつ伝搬する性質を有することから、スラブだけでなく、周囲の構造物からにも当ってしまい、スラブからの反射波だけでなく、周辺の構造物からの反射波も生じ、それらが重った状態で受信されることになるため、着目するスラブまでの反射波(即ち、距離)を、他の構造物からの反射波(即ち、距離)から分離して計測することは困難である。特許文献1に示される方式は、視野が開けた屋外のスラブヤードで測定するものであり、構造物からの反射波が重なることで、スラブからの反射波だけを選択的に検出することができなくなるといった問題については、考慮されていなかった。
【0009】
本発明の一態様は、周囲に構造物がある場合でも、安定して測定対象物までの距離を計測することができるようにする技術を提供するものである。
【課題を解決するための手段】
【0010】
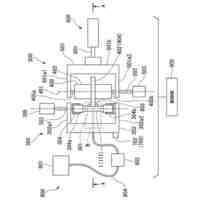
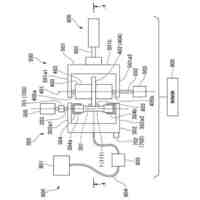
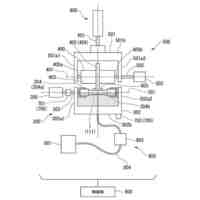
上記課題を解決すべく、本発明の一態様に係る距離測定装置は、マイクロ波を用いて、移動する測定対象物までの距離を測定する距離測定装置であって、予め決められた掃引時間の間に、予め決められた掃引周波数だけ周波数が線形に変化する波形を1回のチャープ波形であるとした場合に、所定回数のチャープ波形からなるマイクロ波を発振する発振部と、前記測定対象物の移動方向に対して傾いた方向から、前記測定対象物に向けて、前記所定回数のチャープ波形からなるマイクロ波を送信波として送信する送信アンテナと、前記送信波が前記測定対象物を含む物体に当たって反射することで生じた反射波を受信する受信アンテナと、前記測定対象物までの距離を算出する演算処理部と、を有し、前記演算処理部は、前記反射波と前記送信波に基づく参照波とから得られる前記所定回数分のビート波に対応する関数をフーリエ変換することで、前記物体までの距離に対応する周波数と、前記物体までの距離と、前記所定回数分のビート波に対応する関数のフーリエスペクトルである第1フーリエスペクトルと、を算出する第1フーリエ変換部と、前記所定回数分のビート波のそれぞれに対応する前記第1フーリエスペクトルを時間軸に並べて、前記物体までの距離に対応する周波数ごとにフーリエ変換することで、前記物体までの距離ごとに、前記物体の速度と、前記第1フーリエスペクトルのフーリエスペクトルである第2フーリエスペクトルと、を算出する第2フーリエ変換部と、前記物体までの距離と前記物体の速度とを各軸とした、前記第2フーリエスペクトルの絶対値を示す図において、前記物体の速度が0となる位置を挟んで前記第2フーリエスペクトルの絶対値が非対称となる位置を特定し、前記非対称となる位置に対応する前記物体までの距離に基づいて、前記測定対象物までの距離を算出する距離算出部と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本製鉄株式会社
鋼材
11日前
日本製鉄株式会社
圧延装置
24日前
日本製鉄株式会社
構造部材
5日前
日本製鉄株式会社
熱間圧延鋼材
10日前
日本製鉄株式会社
転炉精錬方法
3日前
日本製鉄株式会社
電車線柱構造
11日前
日本製鉄株式会社
スナウト装置
19日前
日本製鉄株式会社
溶鉄の精錬方法
10日前
日本製鉄株式会社
車輪径の管理方法
1か月前
日本製鉄株式会社
コークスの製造方法
3日前
日本製鉄株式会社
スポット溶接用電極
14日前
日本製鉄株式会社
除滓方法及び除滓装置
21日前
日本製鉄株式会社
含炭塊成鉱の製造方法
13日前
日本製鉄株式会社
転がり疲労強度試験装置
5日前
日本製鉄株式会社
転がり疲労強度試験装置
5日前
日本製鉄株式会社
転がり疲労強度試験装置
5日前
日本製鉄株式会社
転がり疲労強度試験装置
5日前
日本製鉄株式会社
転がり疲労強度試験装置
5日前
日本製鉄株式会社
Al-Zn系合金被覆鋼板
25日前
日本製鉄株式会社
高炉の還元粉化量の推定方法
25日前
日本製鉄株式会社
管状体及び管状体の製造方法
14日前
日本製鉄株式会社
チタン板およびその製造方法
19日前
日本製鉄株式会社
鋼材接合部材及び鋼材の接合構造
25日前
日本製鉄株式会社
有視煙検知装置及び有視煙検知方法
7日前
日本製鉄株式会社
鋼材の接合継手及び鋼材の接合構造
19日前
日本製鉄株式会社
出銑口開孔装置および出銑口開孔方法
24日前
日本製鉄株式会社
処理装置、処理方法、およびプログラム
26日前
日本製鉄株式会社
熱風炉の解体方法および熱風炉の築炉方法
19日前
日本製鉄株式会社
板材の平坦度測定方法および平坦度測定装置
3日前
日本製鉄株式会社
ドロス位置推定装置、及びドロス位置推定方法
11日前
日本製鉄株式会社
物流描画装置、物流描画処理方法及びプログラム
17日前
日本製鉄株式会社
計画作成装置、計画作成方法、およびプログラム
3日前
日本製鉄株式会社
溶銑容器用の湿式吹付材及びそれを施工した混銑車
20日前
日本製鉄株式会社
異常判定装置、異常判定システム及び異常判定方法
11日前
日本製鉄株式会社
情報提供装置、情報提供方法及びコンピュータープログラム
11日前
日本製鉄株式会社
クランクシャフト用素形材及びクランクシャフト用素形材の製造方法
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ