TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171857
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023089115
出願日
2023-05-30
発明の名称
測距装置および機器
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G01S
17/894 20200101AFI20241205BHJP(測定;試験)
要約
【課題】測距精度の向上に有利な技術を提供する。
【解決手段】光源と、光電変換部と、前記光源が発する光を受けた対象物の像を前記光電変換部に形成するための光学系と、前記光電変換部によって光電変換された電気信号に基づいて前記対象物までの距離情報を取得するための演算部と、を備える測距装置であって、前記光学系のフォーカス駆動を制御するフォーカス駆動部をさらに備え、前記フォーカス駆動部は、対象物までの距離を測定する測距動作を行う期間において、フォーカス駆動を行う。
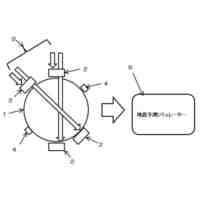
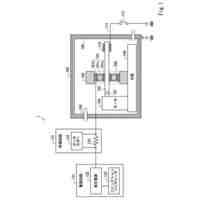
【選択図】図1
特許請求の範囲
【請求項1】
光源と、光電変換部と、前記光源が発する光を受けた対象物の像を前記光電変換部に形成するための光学系と、前記光電変換部によって光電変換された電気信号に基づいて前記対象物までの距離情報を取得するための演算部と、を備える測距装置であって、
前記光学系のフォーカス駆動を制御するフォーカス駆動部をさらに備え、
前記フォーカス駆動部は、対象物までの距離を測定する測距動作を行う期間において、フォーカス駆動を行うことを特徴とする測距装置。
続きを表示(約 1,900 文字)
【請求項2】
前記フォーカス駆動部は、前記光学系の被写界深度が対象物のサーチ範囲に入るようにフォーカス駆動を行うことを特徴とする請求項1に記載の測距装置。
【請求項3】
前記フォーカス駆動部は、仮想的な被写体距離が断続的または連続的に変化するようにフォーカス駆動を行うことを特徴とする請求項1に記載の測距装置。
【請求項4】
前記測距動作において、前記測距装置は、前記光源の発光から前記光電変換部が露光動作を行うまでの待機時間が互いに異なる複数の撮影動作を行い、
前記フォーカス駆動部は、前記複数の撮影動作のそれぞれの前記待機時間によって決まる測距距離に応じて、仮想的な被写体距離が変化するようにフォーカス駆動を行うことを特徴とする請求項1に記載の測距装置。
【請求項5】
前記フォーカス駆動部は、前記複数の撮影動作のそれぞれの撮影動作に応じて、断続的に仮想的な被写体距離が変化するようにフォーカス駆動を行うことを特徴とする請求項4に記載の測距装置。
【請求項6】
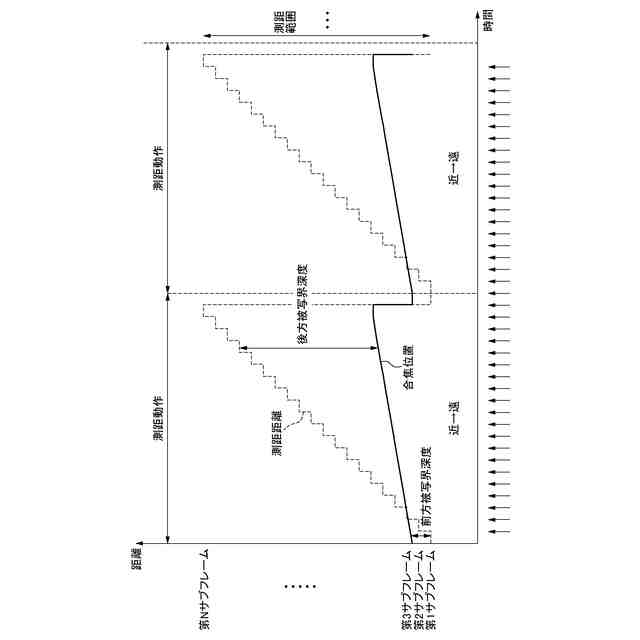
前記待機時間は、前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも長くなるように制御され、
前記複数の撮影動作のうち最初の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最初の撮影動作における合焦位置の前方被写界深度の範囲であり、
前記複数の撮影動作のうち最後の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最後の撮影動作における合焦位置の後方被写界深度の範囲であることを特徴とする請求項4に記載の測距装置。
【請求項7】
前記待機時間は、前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも短くなるように制御され、
前記複数の撮影動作のうち最初の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最初の撮影動作における合焦位置の後方被写界深度の範囲であり、
前記複数の撮影動作のうち最後の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最後の撮影動作における合焦位置の前方被写界深度の範囲であることを特徴とする請求項4に記載の測距装置。
【請求項8】
前記測距動作を含む複数の測距動作が行われ、
前記複数の測距動作は、連続する第1測距動作と第2測距動作とを含み、
前記第1測距動作において、前記待機時間が前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも長くなるように制御される場合、前記第2測距動作において、前記待機時間が前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも短くなるように制御され、
前記第1測距動作において、前記待機時間が前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも短くなるように制御される場合、前記第2測距動作において、前記待機時間が前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも長くなるように制御されることを特徴とする請求項4に記載の測距装置。
【請求項9】
前記複数の測距動作のうち前記待機時間が前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも長くなる測距動作において、前記複数の撮影動作のうち最初の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最初の撮影動作における合焦位置の前方被写界深度の範囲であり、かつ、前記複数の撮影動作のうち最後の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最後の撮影動作における合焦位置の後方被写界深度の範囲であり、
前記複数の測距動作のうち前記待機時間が前記複数の撮影動作のそれぞれにおいて1つ前の撮影動作よりも短くなる測距動作において、前記最初の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最初の撮影動作における合焦位置の後方被写界深度の範囲であり、かつ、前記最後の撮影動作における前記待機時間によって決まる測距距離は、前記光学系の前記最後の撮影動作における合焦位置の前方被写界深度の範囲であることを特徴とする請求項8に記載の測距装置。
【請求項10】
前記光電変換部には複数の画素が配され、
前記複数の撮影動作のそれぞれにおいて、前記複数の画素のそれぞれから前記電気信号が出力されることを特徴とする請求項4に記載の測距装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、測距装置および機器に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
光源から光を射出し、対象物で反射された反射光を検出することによって測距を行うTime of Flight(ToF)方式の測距装置が知られている。特許文献1には、時間分解能を高めるために単一光子アバランシェダイオード(SPAD)を用いた測距装置が示されている。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開2017/0052065号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
ToF方式の測距装置において、焦点が合っていない距離に存在する対象物は、物体の境界(エッジ)がぼけてしまうため、精度が高い測距を行うことが難しい。また、焦点が合う範囲(被写界深度)を拡張するためにF値(絞り値)が大きいレンズを用いると、センサが取り込む光量が減少し、測距精度が低下してしまう。
【0005】
本発明は、測距精度の向上に有利な技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題に鑑みて、本発明の実施形態に係る測距装置は、光源と、光電変換部と、前記光源が発する光を受けた対象物の像を前記光電変換部に形成するための光学系と、前記光電変換部によって光電変換された電気信号に基づいて前記対象物までの距離情報を取得するための演算部と、を備える測距装置であって、前記光学系のフォーカス駆動を制御するフォーカス駆動部をさらに備え、前記フォーカス駆動部は、対象物までの距離を測定する測距動作を行う期間において、フォーカス駆動を行うことを特徴とする。
【発明の効果】
【0007】
本発明によれば、測距精度の向上に有利な技術を提供することができる。
【図面の簡単な説明】
【0008】
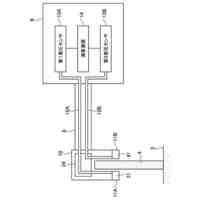
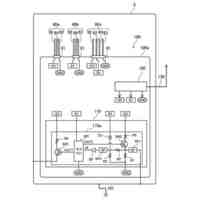
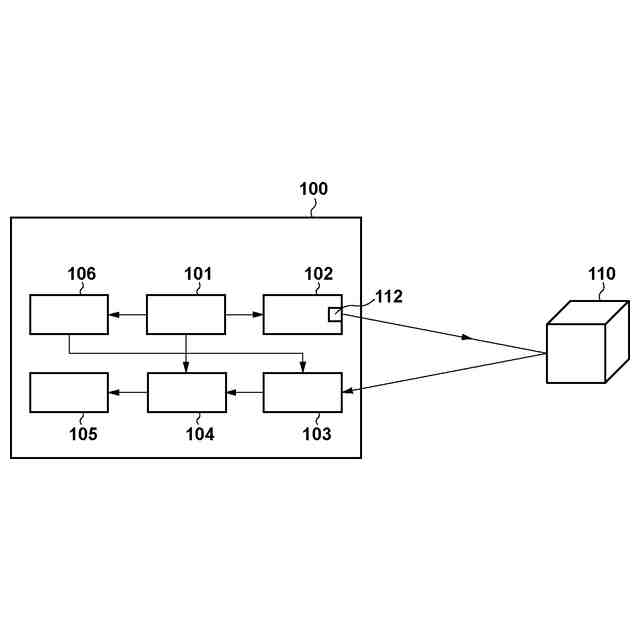
本実施形態の測距装置の構成例を示すブロック図。
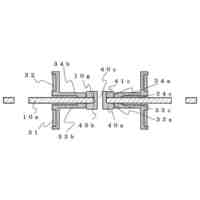
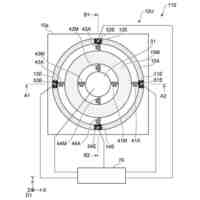
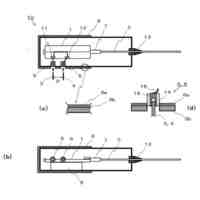
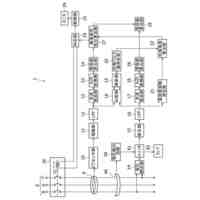
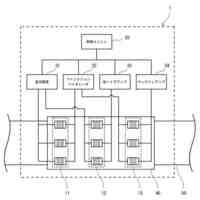
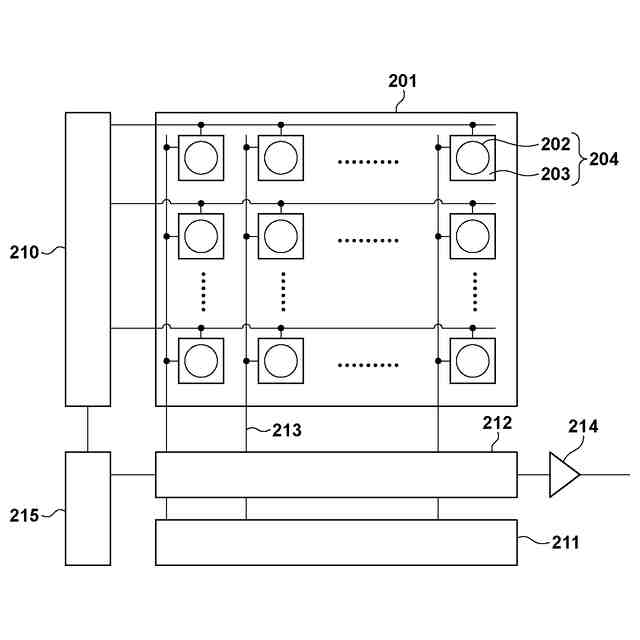
図1の測距装置の受光部の構成例を示すブロック図。
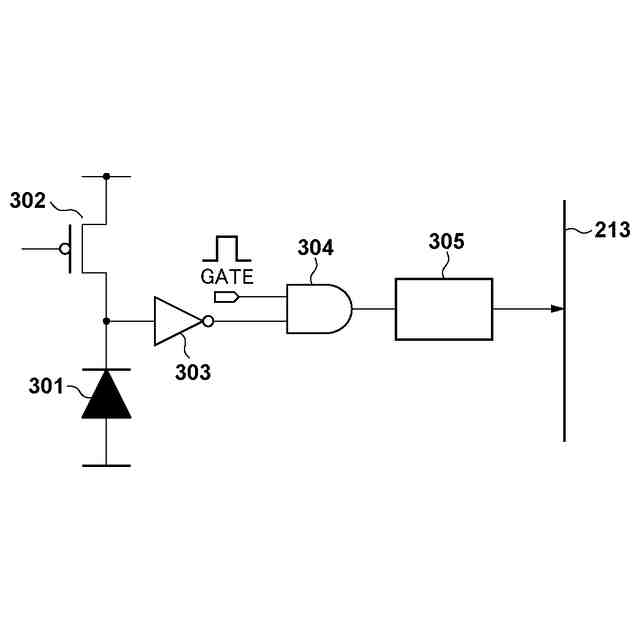
図1の測距装置の画素の構成例を示すブロック図。
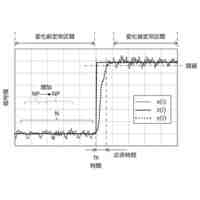
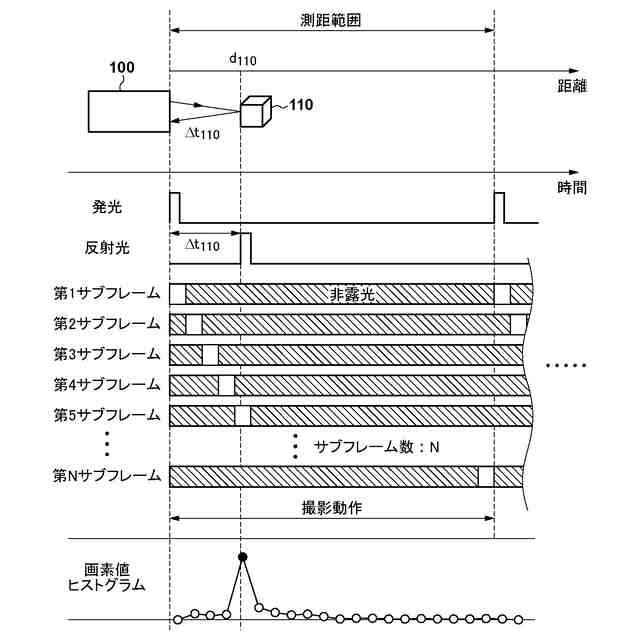
図1の測距装置の時間ゲート型ToF方式の露光タイミング図。
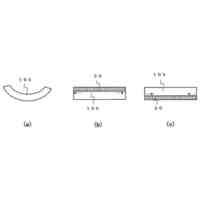
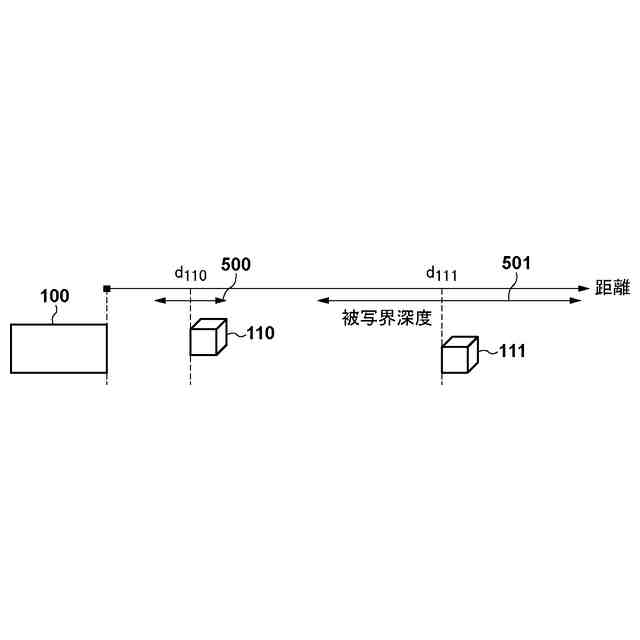
図1の測距装置の対象物と被写界深度との関係を示す図。
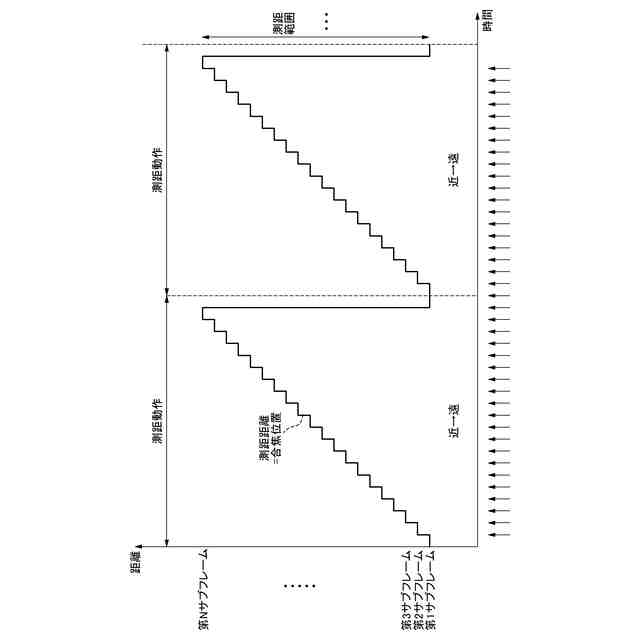
図1の測距装置のフォーカス駆動を示す図。
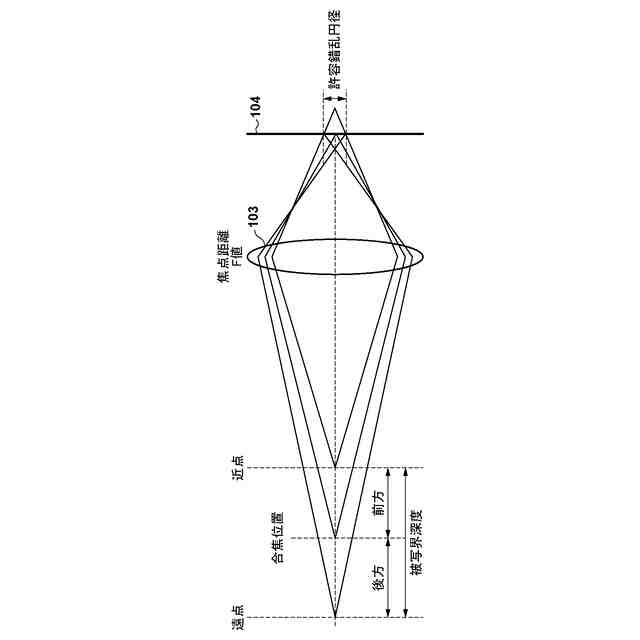
図1の測距装置の被写界深度を説明する図。
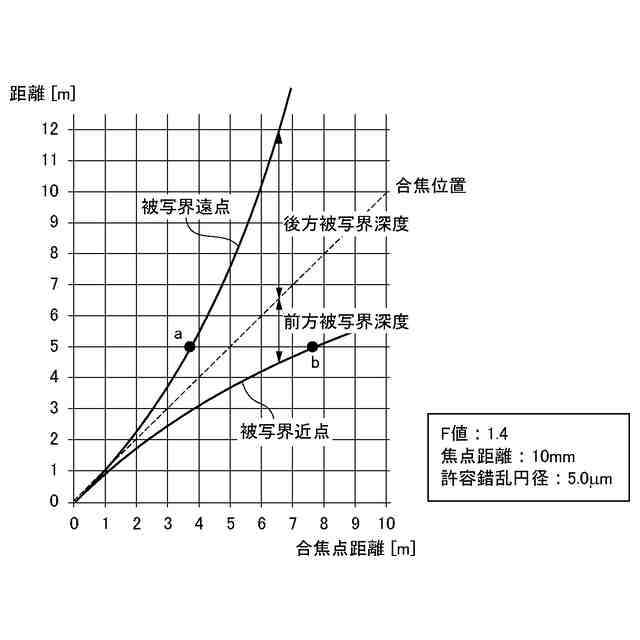
図1の測距装置の合焦位置と被写界深度との関係を示す図。
図1の測距装置のフォーカス駆動を示す図。
図1の測距装置のフォーカス駆動を示す図。
図1の測距装置の変形例を示すブロック図。
図11の測距装置の受光部の構成例を示すブロック図。
図11の測距装置の画素の構成例を示すブロック図。
図11の測距装置のフォーカス駆動を示す図。
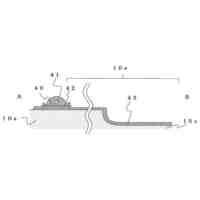
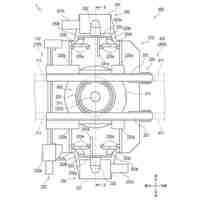
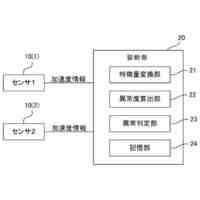
図1の測距装置が組み込まれた機器の構成例を示す図。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。実施形態には複数の特徴が記載されているが、これらの複数の特徴の全てが発明に必須のものとは限らず、また、複数の特徴は任意に組み合わせられてもよい。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。
【0010】
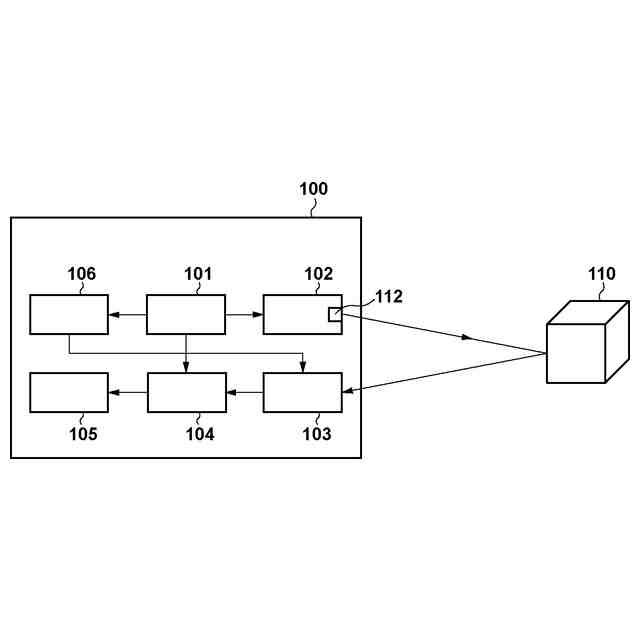
図1~図14を参照して、本開示の測距装置について説明する。図1は、本実施形態における測距装置100の構成例を概略的に示すブロック図である。図1に示されるように、測距装置100は、タイミング制御部101、発光部102、光学系103、受光部104、演算部105、フォーカス駆動部106を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
積算巻尺
8日前
個人
地震予測システム
16日前
丸一株式会社
試験用継手
6日前
日本精機株式会社
検出装置
21日前
個人
電波反射強度向上方法
7日前
株式会社小野測器
測定器
22日前
大和製衡株式会社
組合せ秤
7日前
三菱電機株式会社
レーダ装置
13日前
アズビル株式会社
圧力センサ
6日前
キヤノン電子株式会社
サーボ加速度計
今日
キヤノン電子株式会社
サーボ加速度計
今日
キヤノン電子株式会社
サーボ加速度計
14日前
株式会社東芝
センサ
今日
トヨタ自動車株式会社
評価装置
13日前
キヤノン電子株式会社
サーボ加速度計
14日前
大成建設株式会社
風力測定装置
21日前
大和製衡株式会社
搬送装置
今日
株式会社精工技研
光電圧プローブ
21日前
リンナイ株式会社
電気機器
21日前
株式会社島津製作所
液体注入装置
今日
ミツミ電機株式会社
入力装置
1日前
Igr技研株式会社
Igr測定装置
21日前
株式会社リコー
測距システム
1日前
株式会社不二越
X線測定装置
7日前
能美防災株式会社
構造物劣化診断システム
今日
ミツミ電機株式会社
入力装置
今日
富士電機株式会社
エンコーダ
7日前
ニチコン株式会社
コンデンサ
7日前
株式会社共和電業
物理量検出用変換器
21日前
個人
道または交差点を表現するアルゴリズム
2日前
株式会社山城建設
鉄筋用ロッド支持具
7日前
個人
純金を作用電極に用いたORP測定装置
14日前
株式会社エビス
水準器及びその製造方法
6日前
学校法人近畿大学
検査装置及び検査方法
今日
個人
作業機械の回転角度検出装置
15日前
株式会社明電舎
応答時間評価方法
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ