TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024162293
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2023077663
出願日
2023-05-10
発明の名称
ロボット、ロボットの行動決定システム及びそのプログラム
出願人
学校法人早稲田大学
代理人
個人
主分類
G05D
1/43 20240101AFI20241114BHJP(制御;調整)
要約
【課題】人間と協働して一連の作業を行う際に、人間の行動状況に適応した動作を可能にする。
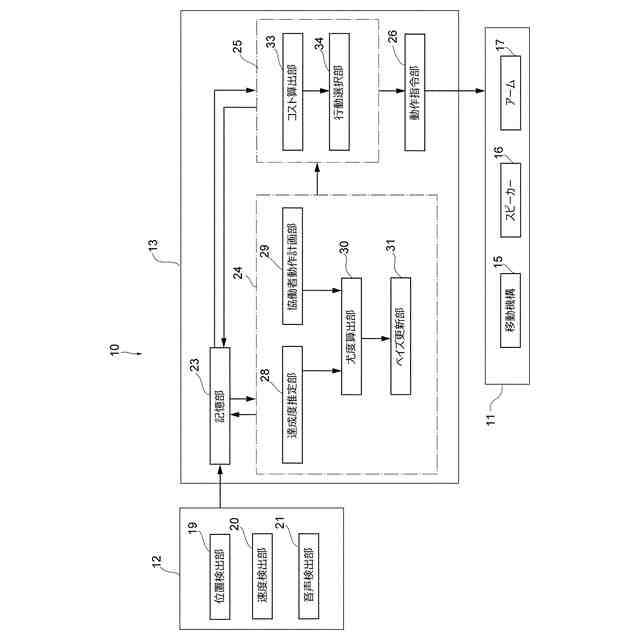
【解決手段】ロボット10は、複数のタスクからなる一連の作業を協働者と協調しながら実行するようにロボット10を動作制御する制御装置13を備える。制御装置13は、協働者の位置情報及び速度情報の経時的変化に基づき、協働者のタスクに対する行動を推定する協働者行動推定部24と、当該推定された協働者の行動に応じたロボット10の動作計画を設定する動作計画設定部25とを備えている。動作計画設定部25では、通常行動、依頼行動、支援行動からなる行動選択肢について動作計画をそれぞれ作成し、ロボット及び協働者が実行するタスクの負荷に対応する協働作業コストを求めて行動選択肢の各行動を比較し、適切となる行動の動作計画を選択する。
【選択図】 図1
特許請求の範囲
【請求項1】
所定のタスクを実行可能に動作する動作部と、周囲の環境情報を検出する検出装置と、当該検出装置の検出結果に基づき前記動作部を動作制御する制御装置とを備え、複数の前記タスクからなる一連の作業を協働者と協調しながら実行するロボットにおいて、
前記検出装置では、協働者を含むロボット周囲の物体の位置情報及び速度情報が検出され、
前記制御装置は、協働者の前記位置情報及び前記速度情報の経時的変化に基づき、協働者の前記タスクに対する行動を推定する協働者行動推定部と、当該協働者行動推定部で推定された協働者の行動に応じたロボットの移動軌道を含む動作計画を設定する動作計画設定部と、前記動作計画に従ってロボットが動作するように前記動作部を制御する動作指令部とを備え、
前記動作計画設定部では、ロボット及び協働者が事前設定により互いに与えられた前記タスクを実行する通常行動と、ロボットが自身の前記タスクの少なくとも1部を前記協働者に代替してもらう依頼行動と、ロボットが協働者の前記タスクの少なくとも1部を代替する支援行動とからなる行動選択肢について、前記動作計画をそれぞれ作成し、ロボット及び協働者が実行する前記タスクの負荷に対応する協働作業コストを求め、当該協働作業コストに基づいて前記行動選択肢の各行動を比較し、適切となる行動の前記動作計画を選択することを特徴とするロボット。
続きを表示(約 2,400 文字)
【請求項2】
所定のタスクを実行可能に動作する動作部と、周囲の環境情報を検出する検出装置と、当該検出装置の検出結果に基づき前記動作部を動作制御する制御装置とを備え、複数の前記タスクからなる一連の作業を協働者と協調しながら実行するロボットにおいて、
前記検出装置では、協働者を含むロボット周囲の物体の位置情報及び速度情報が検出され、
前記制御装置は、協働者の前記位置情報及び前記速度情報の経時的変化に基づき、協働者の前記タスクに対する行動を推定する協働者行動推定部と、当該協働者行動推定部で推定された協働者の行動に応じたロボットの移動軌道を含む動作計画を設定する動作計画設定部と、前記動作計画に従ってロボットが動作するように前記動作部を制御する動作指令部とを備え、
前記動作計画設定部は、協働者及びロボットのそれぞれについて、現在実行中の直近タスクの負荷とそれ以外の残存タスクの負荷の合計に対応した協働作業コストを算出するコスト算出部と、前記協働作業コストに基づき、予め設定された行動選択肢の中から適切な行動を選択する行動選択部とを備え、
前記行動選択肢として、ロボット及び協働者が事前設定により互いに与えられた前記タスクを実行する通常行動と、ロボットが自身の前記タスクの少なくとも1部を前記協働者に代替してもらう依頼行動と、ロボットが協働者の前記タスクの少なくとも1部を代替する支援行動とが設定され、
前記コスト算出部では、前記行動選択肢の各行動についてそれぞれ前記協働作業コストが算出されることを特徴とするロボット。
【請求項3】
前記行動選択部では、協働者及びロボットの前記協働作業コストを総合した総合コストに基づいて、前記依頼行動若しくは前記支援行動を前記通常行動と比較し、前記依頼行動若しくは前記支援行動が前記通常行動よりも小さいことを条件として、前記依頼行動若しくは前記支援行動が選択されることを特徴とする請求項2記載のロボット。
【請求項4】
前記行動選択部では、前記依頼行動や前記支援行動の際に、協働者の主張に対してロボットが同調するリアクティブの状態と判断された場合、前記協働作業コストに対して所定の係数が掛け合わされ、その際の行動を起こし易くするように設定されることを特徴とする請求項2記載のロボット。
【請求項5】
前記行動選択部では、ロボットが前記依頼行動や前記支援行動を選択してロボットから協働者に主張するプロアクティブの状態とした場合、直近の行動が終了するまで、別の行動の前記協働作業コストに対して所定の係数が掛け合わされ、当該別の行動を起こし難くするように設定されることを特徴とする請求項2記載のロボット。
【請求項6】
前記行動選択部では、ロボットが前記依頼行動や前記支援行動を開始した後に、何らかの理由によって協働者が反応できなかった場合に、これら行動を断念して別の行動に変更するよう、前記協働作業コストに対して所定の係数が掛け合わされることを特徴とする請求項2記載のロボット。
【請求項7】
前記協働者行動推定部は、協働者における前記各タスクの達成度を推定する達成度推定部と、協働者が前記各タスクを実行する際の移動軌道を推定し、当該移動軌道に基づき、前記各タスクへの移動容易性に対応するエネルギーを算出する協働者動作計画部と、前記達成度及び前記エネルギーの尤度を算出する尤度算出部と、前記尤度から、前記各タスクを協働者が実行する確率であるタスク実行確率をベイズ推定により周期的に更新するベイズ更新部とを備えたことを特徴とする請求項2記載のロボット。
【請求項8】
所定の複数のタスクからなる一連の作業を協働者と協調しながら実行するロボットの行動を決定するシステムであって、
協働者の位置情報及び速度情報の経時的変化に基づき、協働者の前記タスクに対する行動を推定する協働者行動推定部と、当該協働者行動推定部で推定された協働者の行動に応じたロボットの移動軌道を含む動作計画を設定する動作計画設定部とを備え、
前記動作計画設定部では、ロボット及び協働者が事前設定により互いに与えられた前記タスクを実行する通常行動と、ロボットが自身の前記タスクの少なくとも1部を前記協働者に代替してもらう依頼行動と、ロボットが協働者の前記タスクの少なくとも1部を代替する支援行動とからなる行動選択肢について、前記動作計画をそれぞれ作成し、ロボット及び協働者が実行する前記タスクの負荷に対応する協働作業コストを求め、当該協働作業コストに基づいて前記行動選択肢の各行動を比較し、適切となる行動の前記動作計画を選択することを特徴とするロボットの行動決定システム。
【請求項9】
所定の複数のタスクからなる一連の作業を協働者と協調しながら実行するロボットの行動を決定するシステムのプログラムであって、
協働者の位置情報及び速度情報の経時的変化に基づき、協働者の前記タスクに対する行動を推定する協働者行動推定部と、当該協働者行動推定部で推定された協働者の行動に応じたロボットの移動軌道を含む動作計画を設定する動作計画設定部としてコンピュータを機能させ、
前記動作計画設定部では、ロボット及び協働者が事前設定により互いに与えられた前記タスクを実行する通常行動と、ロボットが自身の前記タスクの少なくとも1部を前記協働者に代替してもらう依頼行動と、ロボットが協働者の前記タスクの少なくとも1部を代替する支援行動とからなる行動選択肢について、前記動作計画をそれぞれ作成し、ロボット及び協働者が実行する前記タスクの負荷に対応する協働作業コストを求め、当該協働作業コストに基づいて前記行動選択肢の各行動を比較し、適切となる行動の前記動作計画を選択することを特徴とするロボットの行動決定システムのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、人間と協働して一連の作業を行う際に、人間の行動状況に適応した動作を可能とするロボット、ロボットの行動決定システム及びそのプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近時、人間が存在する複雑な環境下で自律的に移動可能となる様々な自律移動ロボットが出現しており、人間と協調しながら所定のタスクを実行する自律移動ロボットの需要が高まっている。このような自律移動ロボットにおいては、周囲の人間や障害物の状況をセンシングし、これら人間や障害物との干渉を回避しながらタスクを行う必要がある。また、人間との共存環境下で自律移動するロボットにおいては、人間の動きを考慮した人間との協調的な動作が要求される。そこで、本発明者らは、自身の研究成果として、ロボットが移動する環境に存在する人間の動きを踏まえた最適な移動経路や目的地を探索しながら行動計画を行うロボットを種々提案している(特許文献1、特許文献2等参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-46773号公報
特開2023-32381号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、複数の人間(作業者)が共働して一連の作業を行う現場では、通常、各作業者が自身に与えられたタスクを実行する。しかし、時には、「やってもらう」、「やってあげる」という協働譲り合い行動を取ることで、通常より作業効率を向上できる場合がある。このような協働譲り合い行動は、相手の効率低下の代わりに、自身の効率向上を試みる依頼行動と、自身の効率低下の代わりに、相手の効率向上を試みる支援行動がある。また、主張的に相手との譲り合いを促すプロアクティブと、相手のプロアクティブな行動に同調するリアクティブの関係性が考えられる。そこで、人間が共存する複雑な環境下で自由に行動できるロボットが、人間と協働作業を行う際においても、ロボットと協働者の効率をより効果的に向上させるためには、人間同士の作業遂行と同様、互いの状況や相手の行動意図に応じて依頼行動や支援行動を選択し、プロアクティブとリアクティブの関係性も逐次的に判断することが必要となる。
【0005】
本発明は、このような課題に着目して案出されたものであり、その目的は、ロボットと協働作業を行う際の協働者の行動を推定し、通常の行動の他に、相手方への依頼や支援を含めた行動を計画し、それらの中から状況に応じて適切な行動を選択するロボット、ロボットの行動決定システム及びそのプログラムを提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するため、本発明は、主として、所定のタスクを実行可能に動作する動作部と、周囲の環境情報を検出する検出装置と、当該検出装置の検出結果に基づき前記動作部を動作制御する制御装置とを備え、複数の前記タスクからなる一連の作業を協働者と協調しながら実行するロボットにおいて、前記検出装置では、協働者を含むロボット周囲の物体の位置情報及び速度情報が検出され、前記制御装置は、協働者の前記位置情報及び前記速度情報の経時的変化に基づき、協働者の前記タスクに対する行動を推定する協働者行動推定部と、当該協働者行動推定部で推定された協働者の行動に応じたロボットの移動軌道を含む動作計画を設定する動作計画設定部と、前記動作計画に従ってロボットが動作するように前記動作部を制御する動作指令部とを備え、前記動作計画設定部では、ロボット及び協働者が事前設定により互いに与えられた前記タスクを実行する通常行動と、ロボットが自身の前記タスクの少なくとも1部を前記協働者に代替してもらう依頼行動と、ロボットが協働者の前記タスクの少なくとも1部を代替する支援行動とからなる行動選択肢について、前記動作計画をそれぞれ作成し、ロボット及び協働者が実行する前記タスクの負荷に対応する協働作業コストを求め、当該協働作業コストに基づいて前記行動選択肢の各行動を比較し、適切となる行動の前記動作計画を選択する、という構成を採っている。
【発明の効果】
【0007】
本発明によれば、予め設定されたタスクを実行する協働者の行動を随時推定することができ、当該推定に応じ、通常行動の他に、依頼行動や支援行動の協働譲り合い行動を含め、それら行動の中から、協働者や作業の状況に応じて適切となるロボットの行動が適宜選択され、ロボットと協働者とのスムーズな協調作業が可能になる。
【図面の簡単な説明】
【0008】
本実施形態に係るロボットの動作制御に関連する構成のみを概略的に表したブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照しながら説明する。
【0010】
図1には、本実施形態に係るロボットの動作制御に関連する構成のみを概略的に表したブロック図が示されている。本実施形態のロボット10は、周囲の人間(以下、「協働者」と称する)と協調しながら、予め設定された一連の作業を実行可能に動作する自律移動ロボットである。当該一連の作業には、所定目標に対して移動して所定作業を実行する行動であるタスクが様々存在する。例えば、複数の場所に散在する室内ゴミ等の対象物を他の一箇所の目的地点となるゴミ箱等に集める一連の作業について、ロボット10と協働者が分担して行う場合には、ロボット10と協働者それぞれが相互に異なる場所となる目標位置の対象物に向かって移動するタスクと、それぞれが各対象物を把持するタスクと、それぞれが目的となる地点である他の目標位置に運搬するタスクとがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
6日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
6日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
自動走行体
2か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
自律移動体
5日前
トヨタ自動車株式会社
搬送ロボット
19日前
トヨタ自動車株式会社
搬送システム
29日前
オムロン株式会社
自律作業システム
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
トヨタ自動車株式会社
ロボットシステム
29日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
位置推定システム
5日前
トヨタ自動車株式会社
自律移動システム
5日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社栗本鐵工所
操作装置
20日前
株式会社FUJI
工作機械の操作システム
12日前
株式会社フカデン
外周部加工システム
2か月前
株式会社デンソー
電子制御装置
2か月前
株式会社ダイフク
物品搬送設備
29日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
東芝ライテック株式会社
管理システム
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
日立建機株式会社
自律走行システム
2か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
株式会社デンソー
移動体制御装置
2か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
19日前
大阪瓦斯株式会社
二次圧制御機構
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































