TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024161130
公報種別
公開特許公報(A)
公開日
2024-11-15
出願番号
2024145609,2022160983
出願日
2024-08-27,2022-10-05
発明の名称
自己位置推定装置、制御方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/28 20060101AFI20241108BHJP(測定;試験)
要約
【課題】地図又は計測値のいずれかに誤差が生じた場合であっても、自己位置推定精度の低下を好適に抑制することが可能な自己位置推定装置を提供する。
【解決手段】車載機1の自車位置推定部17は、予測自車位置X
-
(t)を示す情報を生成する位置予測部21と、位置推定部22とを有する。位置推定部22は、移動体から対象物までのライダ2による計測距離を示す地物計測値Z(t)及び地物情報に基づき予測された地物予測値Z
-
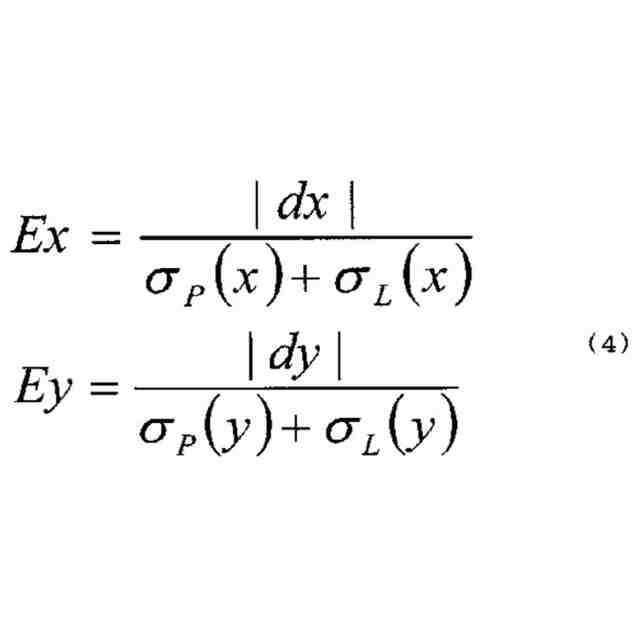
(t)を算出する。そして、位置推定部22は、地物計測値と地物予測値との差分値dx、dyと、位置推定精度σ
P
と、ライダ計測精度σ
L
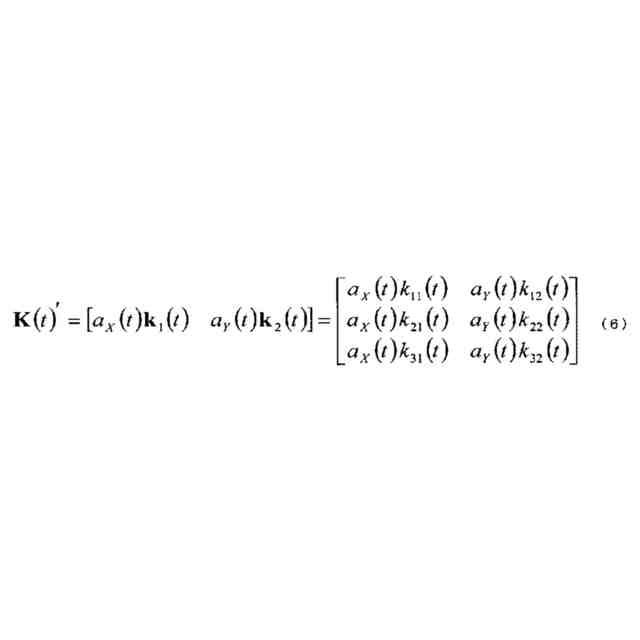
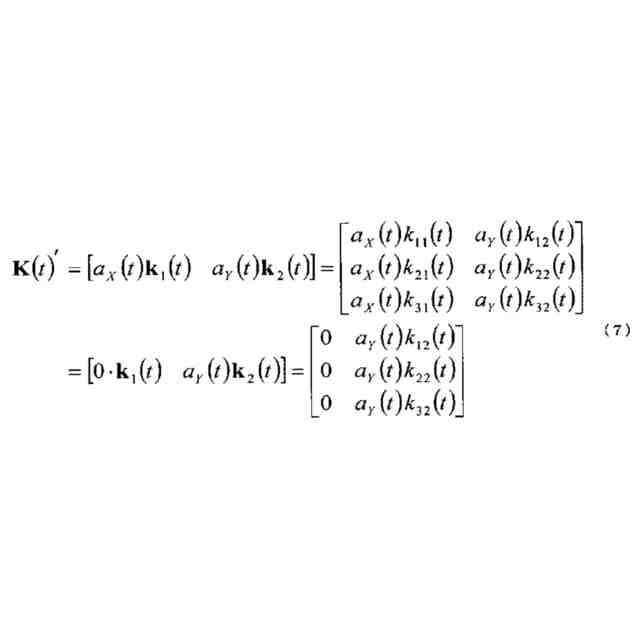
とに基づく差分評価値Ex、Eyに応じて、カルマンゲインK(t)を補正する係数値a
X
(t)、a
Y
(t)を決定する。
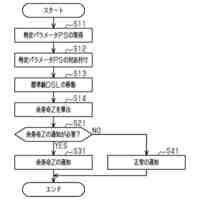
【選択図】図7
特許請求の範囲
【請求項1】
予測された自己位置を示す予測位置情報を取得する第1取得部と、
移動体から対象物までの計測部による計測距離である第1距離と、前記対象物の位置情報に基づき予測された前記移動体から前記対象物までの距離である第2距離とを取得する第2取得部と、
前記移動体の自己位置精度情報を取得する第3取得部と、
前記第1距離と前記第2距離との差分値に所定の利得を乗じた値により、前記予測された自己位置を補正する補正部と、を備え、
前記補正部は、前記自己位置精度情報に基づき、前記利得に対する補正係数を決定する、
自己位置推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自己位置推定技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来から、車両の進行先に設置される地物をレーダやカメラを用いて検出し、その検出結果に基づいて自車位置を校正する技術が知られている。例えば、特許文献1には、計測センサの出力と、予め地図上に登録された地物の位置情報とを照合させることで自己位置を推定する技術が開示されている。また、特許文献2には、カルマンフィルタを用いた自車位置推定技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-257742号公報
特開2017-72422号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
計測センサの出力と、予め地図上に登録された地物の位置情報とを照合させることで自己位置を推定する場合、地図又は計測センサの出力のいずれかに誤差があると、自己位置が誤って補正され、自己位置推定精度が低下する。計測センサの出力に誤差が生じる状況としては、視線誘導標や他車両の反射板等の反射強度の高い物体が多数存在し、それらを誤って対象の地物と検出してしまう場合や、自車と対象の地物の間に他車両が存在し、計測センサによるスキャンの全てあるいは一部が遮蔽(オクルージョン)される場合などがある。また、地図に誤差が生じる状況としては、最新の情報が地図に反映されておらず、地物の位置座標が不正確な場合などがある。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、地図又は計測値のいずれかに誤差が生じた場合であっても、自己位置推定精度の低下を好適に抑制することが可能な自己位置推定装置を提供することを主な目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、自己位置推定装置であって、予測された自己位置を示す予測位置情報を取得する第1取得部と、移動体から対象物までの計測部による計測距離を示す第1距離情報と、前記対象物の位置情報に基づき予測された前記移動体から前記対象物までの距離を示す第2距離情報とを取得する第2取得部と、前記移動体の自己位置精度情報を取得する第3取得部と、前記第1距離情報、前記第2距離情報及び前記自己位置精度情報に基づき、前記予測された自己位置を補正する補正部と、を備える。
【図面の簡単な説明】
【0007】
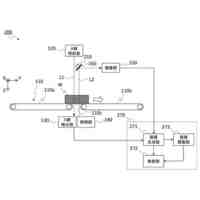
運転支援システムの概略構成図である。
車載機の機能的構成を示すブロック図である。
地図DBのデータ構造の一例である。
状態変数ベクトルを2次元直交座標で表した図である。
予測ステップと計測更新ステップとの概略的な関係を示す図である。
自車位置推定部の機能ブロックを示す。
車両の推定自車位置と地物との位置関係を示す。
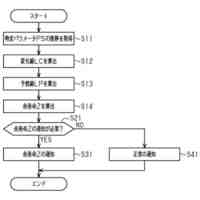
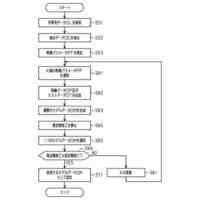
自車位置推定処理のフローチャートである。
本実施例に基づく自車位置推定処理の実験結果を示す。
本実施例に基づく自車位置推定処理の実験結果を示す。
ある地物の地物情報の位置座標を進行方向に80cmずらした場合の従来の自車位置推定処理の実験結果を示す。
ある地物の地物情報の位置座標を進行方向に80cmずらした場合の実施例に基づく自車位置推定処理の実験結果を示す。
【発明を実施するための形態】
【0008】
本発明の好適な実施形態によれば、自己位置推定装置は、予測された自己位置を示す予測位置情報を取得する第1取得部と、移動体から対象物までの計測部による計測距離を示す第1距離情報と、前記対象物の位置情報に基づき予測された前記移動体から前記対象物までの距離を示す第2距離情報とを取得する第2取得部と、前記移動体の自己位置精度情報を取得する第3取得部と、前記第1距離情報及び前記第2距離情報が示す距離の差分値、並びに、前記自己位置精度情報に基づき、前記予測された自己位置を補正する補正部と、を備える。この態様によれば、自己位置推定装置は、第1距離情報及び第2距離情報が示す距離の差分値と、自己位置精度情報とに基づき、予測された自己位置を好適に補正することができる。
【0009】
上記自己位置推定装置の一態様では、前記補正部は、前記差分値と、前記自己位置精度情報と、前記計測部の計測精度情報とに基づき、前記予測された自己位置を補正する。この態様では、自己位置推定装置は、計測部の計測精度をさらに勘案し、自己位置を好適に補正することができる。
【0010】
上記自己位置推定装置の他の一態様では、前記補正部は、前記差分値と、前記自己位置精度情報とに基づき、前記差分値を評価する評価値を算出し、前記予測された自己位置を前記差分値により補正する度合いを前記評価値に基づいて決定する。この態様によれば、自己位置推定装置は、自己位置精度情報に基づき上述の差分値を評価することで、予測された自己位置を上述の差分値により補正する際の度合いを的確に定めることができる。これにより、第1距離情報又は第2距離情報に誤差が存在する場合であっても、自車位置推定精度が低下するのを好適に抑制することができる。この場合、好適には、前記補正部は、前記差分値に所定の利得を乗じた値により、前記予測された自己位置を補正し、前記補正部は、前記評価値に基づいて、前記利得に対する補正係数を決定するとよい。さらに好適には、前記利得は、カルマンゲインであるとよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
2日前
個人
アクセサリー型テスター
3日前
栄進化学株式会社
浸透探傷用濃縮液
9日前
エイブリック株式会社
電流検出回路
16日前
東レ株式会社
シート状物の検査方法
17日前
株式会社テイエルブイ
振動検出装置
2日前
株式会社ミツトヨ
画像測定機
4日前
株式会社チノー
放射光測温装置
16日前
ダイハツ工業株式会社
試料セル
2日前
大和製衡株式会社
計量装置
9日前
株式会社 キョーワ
食品搬送装置
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
トヨタ自動車株式会社
電気自動車
3日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
富士電機株式会社
エンコーダ
17日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
日本碍子株式会社
ガスセンサ
16日前
理研計器株式会社
ガス検出器
4日前
株式会社熊谷組
計測システム
9日前
大成建設株式会社
画像表示システム
12日前
株式会社ニコン
検出装置
2日前
株式会社 システムスクエア
検査装置
10日前
東洋計器株式会社
超音波式流量計
9日前
株式会社デンソー
試験装置
12日前
東洋計器株式会社
超音波式流量計
9日前
東洋計器株式会社
超音波式流量計
9日前
TDK株式会社
温度センサ
17日前
トヨタ自動車株式会社
情報処理装置
2日前
シチズンファインデバイス株式会社
圧力検出装置
16日前
株式会社豊田自動織機
電流検出装置
2日前
合同会社ステディステップス
側圧測定装置
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
情報処理装置
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ