TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024155571
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023070393
出願日
2023-04-21
発明の名称
処理装置、移動体、移動制御システム、概形検出方法及びプログラム
出願人
株式会社東芝
代理人
弁理士法人志賀国際特許事務所
主分類
G05D
1/43 20240101AFI20241024BHJP(制御;調整)
要約
【課題】移動体の移動方向に存在する他の移動体の概形を検出する。
【解決手段】処理装置は、物体を検知して移動する移動体の概形を検出する。前記処理装置は、物体形状復元部を備える。物体形状復元部は、第1移動体に搭載されたセンサによる観測データと、第2移動体のセンサ取付部の形状に対応付けられた概形情報を含むデータベースの参照結果とを用いて、前記観測データから前記第2移動体の形状を推定する。
【選択図】図3B
特許請求の範囲
【請求項1】
物体を検知して移動する移動体の概形を検出する処理装置であって、
第1移動体に搭載されたセンサによる観測データと、第2移動体のセンサ取付部の形状に対応付けられた概形情報を含むデータベースの参照結果とを用いて、前記観測データから前記第2移動体の形状を推定する物体形状復元部
を備える処理装置。
続きを表示(約 1,200 文字)
【請求項2】
前記物体形状復元部は、
前記センサによる観測データを用いて前記データベースを参照して、前記参照結果として前記第2移動体の概形情報を得る
請求項1記載の処理装置。
【請求項3】
前記センサによる観測データと前記物体形状復元部によって復元された第2移動体の形状を示す概形情報とに基づいて、障害物を示す障害物情報を生成する障害物情報生成部と、
前記障害物情報に基づいて移動の目標位置までの経路を生成する経路生成部と、
前記経路をもとに前記第1移動体の移動を制御する移動制御部と、
を備える請求項1記載の処理装置。
【請求項4】
前記第2移動体及びコントローラと通信する通信部
を備え、
前記物体形状復元部は、
前記第2移動体及びコントローラの何れかから前記通信部を介して前記第1移動体又は前記第2移動体の走行情報を取得して、前記第1移動体の移動を制御するための情報を更新する
請求項1記載の処理装置。
【請求項5】
前記障害物情報を提示する状態提示部
を備える請求項3記載の処理装置。
【請求項6】
物体を検知して移動する移動体であって、
第1移動体に搭載されて、観測範囲内に存在する第2移動体の形状の少なくとも一部を検出するセンサと、
前記センサによる観測データと、第2移動体のセンサ取付部の形状に対応付けられた概形情報を含むデータベースの参照結果とを用いて、前記観測データから前記第2移動体の形状を推定する物体形状復元部と
を備える移動体。
【請求項7】
前記第1移動体のセンサ取付部の形状と前記第1移動体を識別可能な情報の何れかを提示する形状情報提示部
を備え、
前記センサは、
前記形状情報提示部による前記提示を検出する
請求項6記載の移動体。
【請求項8】
前記センサは、LRF(Laser Range Finder)を含む、
請求項6又は請求項7記載の移動体。
【請求項9】
請求項6又は請求項7記載の移動体である第1移動体と、
第2移動体のセンサ取付部の形状に対応付けられた概形情報を含むデータベースと
を備える移動制御システム。
【請求項10】
障害物を検知して移動する移動体による概形検出方法であって、
第1移動体に搭載されたセンサによる観測データと、第2移動体のセンサ取付部の形状に対応付けられた概形情報を含むデータベースの参照結果とを用いて、前記観測データから前記第2移動体の形状を推定する過程
を含む概形検出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、処理装置、移動体、移動制御システム、概形検出方法及びプログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
センサを具備した移動ロボット(移動体)には、その周辺の物の在否及び位置に関する情報を得るために周囲環境を計測するものがある。自律移動中の移動ロボットは、例えば、事前に作成された周辺環境の地図情報とセンサの計測結果とに基づいて自らの位置を推定する。その際、センサの計測結果に地図情報に記載のないものが含まれていた場合に、そのものを障害物として扱うことできる。これにより、移動ロボットは、その障害物等を回避しながら走行することができる。
なお、共通する環境下で移動する移動ロボットが増加すると、移動中に他の移動ロボットを検出・近接する機会が増加する。このような場合、移動ロボットの近傍に存在する障害物の形状をより適正に検出できることが要求される。しかしながら、移動ロボットに取り付けたセンサの位置などにより、その移動ロボットの移動方向に存在する他の移動ロボットの形状を適正に検出できないことがあった。
【先行技術文献】
【特許文献】
【0003】
特開平07-129238号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、移動体の移動方向に存在する他の移動体の概形を検出することができる処理装置、移動体、移動制御システム、概形検出方法及びプログラムを提供することである。
【課題を解決するための手段】
【0005】
実施形態の処理装置は、物体を検知して移動する移動体の概形を検出する。前記処理装置は、物体形状復元部を持つ。物体形状復元部は、第1移動体に搭載されたセンサによる観測データと、第2移動体のセンサ取付部の形状に対応付けられた概形情報を含むデータベースの参照結果とを用いて、前記観測データから前記第2移動体の形状を推定する。
【図面の簡単な説明】
【0006】
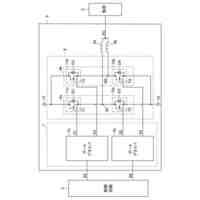
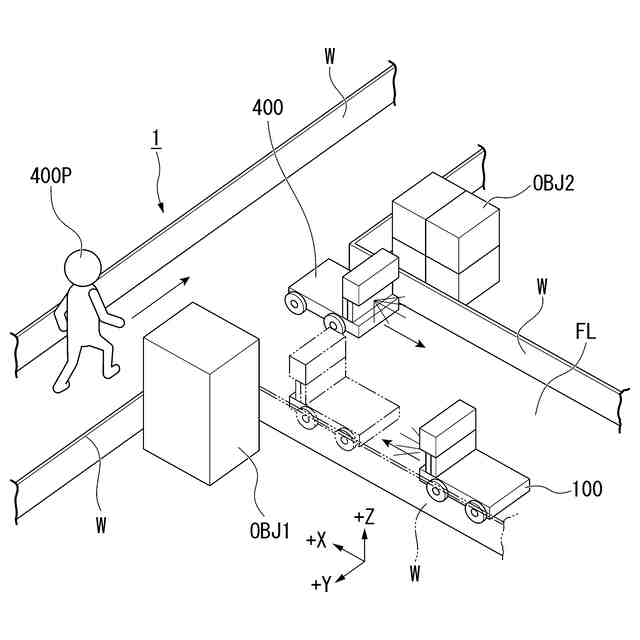
第1の実施形態の移動制御システムの適用場所の一例を示す模式図。
第1の実施形態の移動制御システムの適用場所の一例を示す模式図。
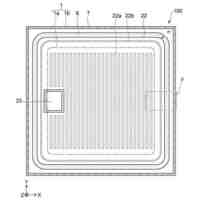
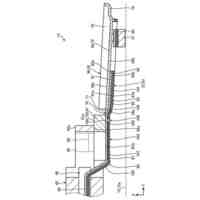
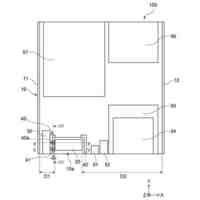
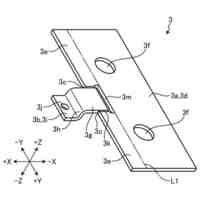
第1の実施形態の移動ロボットの平面図。
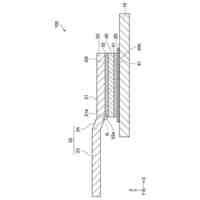
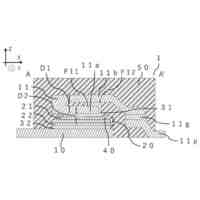
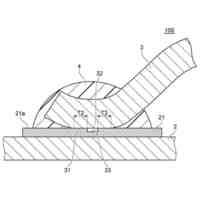
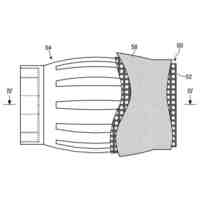
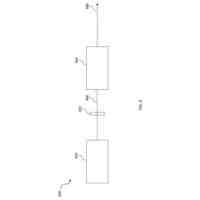
第1の実施形態の移動ロボットによる物体の検出について説明するための図。
第1の実施形態の移動ロボットによる物体の検出について説明するための図。
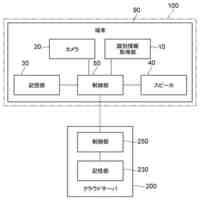
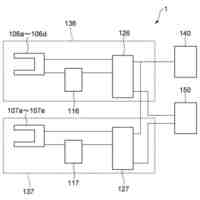
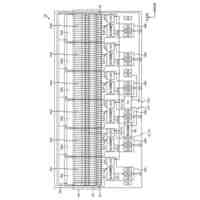
第1の実施形態の移動制御システムの構成図。
第1の実施形態の記憶部に格納されるデータを示す図。
第1の実施形態の走行情報を説明するための図。
実施形態の予定占有空間情報の一例を説明するための図。
実施形態の形状情報DB300の構成図。
実施形態の移動ロボットの移動制御に係る処理のフローチャート。
実施形態を適用するシナリオの前提条件の一例を示す図。
図7Aのシナリオにおいてセンサによって検出された位置を示す図。
図7Aのシナリオにおいてセンサによって検出された移動ロボットの位置を示す図。
図7Aのシナリオの比較例を説明するための図。
実施形態の移動ロボット間の通信を利用した予定占有空間の調整について説明するための図。
実施形態の移動ロボット間の通信を利用した予定占有空間の調整について説明するための図。
実施形態の移動ロボット間の通信を利用した予定占有空間の調整について説明するための図。
比較例の移動ロボット間の通信を利用した予定占有空間の調整について説明するための図。
第2の実施形態の移動制御システムの構成図。
第2の実施形態の移動ロボットの移動制御に係る処理のフローチャート。
第3の実施形態の移動制御システムの構成図。
第4の実施形態の移動制御システムの構成図。
第2の実施形態の移動制御システムを説明するための図。
実施形態の上位システム500のハードウェア構成例を示す図。
【発明を実施するための形態】
【0007】
以下、実施形態の処理装置、移動体、移動制御システム、概形検出方法及びプログラムを、図面を参照して説明する。なお以下の説明では、同一又は類似の機能を有する構成に同一の符号を付す。そして、それら構成の重複する説明は省略する場合がある。なお、本願でいう「XXに基づく」とは、「少なくともXXに基づく」ことを意味し、XXに加えて別の要素に基づく場合も含む。また、「XXに基づく」とは、XXを直接に用いる場合に限定されず、XXに対して演算や加工が行われたものに基づく場合も含む。「XX」は、任意の要素(例えば、任意の情報)である。実施形態の移動ロボット100、400は、移動ロボットの一例である。
【0008】
また先に、+X方向、-X方向、+Y方向、-Y方向、+Z方向、及び-Z方向について定義する。+X方向、-X方向、+Y方向、及び-Y方向は、移動ロボットが移動する床面に沿う方向である。+X方向は、例えば、移動ロボット100の1つの移動方向であり、「前方」と称されることがある。-X方向は、+X方向とは反対方向であり、「後方」と称されることがある。+X方向と-X方向とを区別しない場合は、単に「X方向」と称する。+Y方向及び-Y方向は、X方向とは交差する(例えば略直交する)方向であり、車両本体10の車幅方向、又は「側方」と称されることがある。+Y方向と-Y方向は互いに反対方向である。+Y方向と-Y方向とを区別しない場合は、単に「Y方向」と称する。+Z方向及び-Z方向は、X方向及びY方向とは交差する(例えば略直交する)方向であり、例えば鉛直方向である。+Z方向は、上方に進む方向である。-Z方向は、+Z方向とは反対方向である。+Z方向と-Z方向とを区別しない場合は、単に「Z方向」と称する。なお、本明細書でいう「前方」、「後方」、「側方」、「車幅方向」などの用語は、説明の便宜上、移動ロボット100の1つの移動方向を基準とした視点で表現されたものである。ただし、移動ロボット100の移動方向は、+X方向に限らない。移動ロボット100は、-X方向や+Y方向、-Y方向に移動可能であってもよい。移動ロボット100は、上記の並進移動のほかに、Z方向の軸周りに回転移動してもよい。
【0009】
(第1の実施形態)
図1Aと図1Bは、第1の実施形態の移動制御システム1の適用場所の一例を示す模式図である。図2は、第1の実施形態の移動ロボット100の平面図である。図3Aと図3Bは、第1の実施形態の移動ロボット100による物体の検出について説明するための図である。
【0010】
実施形態の移動制御システム1は、移動ロボット100の一部又は全部を備える。移動ロボット100は、移動制御システム1の一例であってよい。移動制御システム1は、移動ロボット100の一部として形成されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
9日前
株式会社東芝
回転電機
9日前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
9日前
株式会社東芝
発振回路
29日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
25日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
16日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
5日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
アイソレータ
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
配線支援装置
10日前
株式会社東芝
オゾン発生器
1か月前
株式会社東芝
情報表示装置
9日前
株式会社東芝
電力変換装置
2日前
株式会社東芝
固体撮像装置
1か月前
株式会社東芝
光注入同期装置
16日前
株式会社東芝
電子計算機装置
10日前
株式会社東芝
電池モジュール
1日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ