TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024154715
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023068694
出願日
2023-04-19
発明の名称
車両位置推定方法、プログラム、車両位置推定装置、自律移動体、及び機械学習モデルの学習方法
出願人
国立大学法人金沢大学
代理人
個人
主分類
G01C
21/30 20060101AFI20241024BHJP(測定;試験)
要約
【課題】観測画像において区画線などの路面標示を認識できる尤度を示す信頼度を容易かつ精度良く出力することができる車両位置推定方法などを提供する。
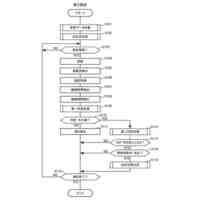
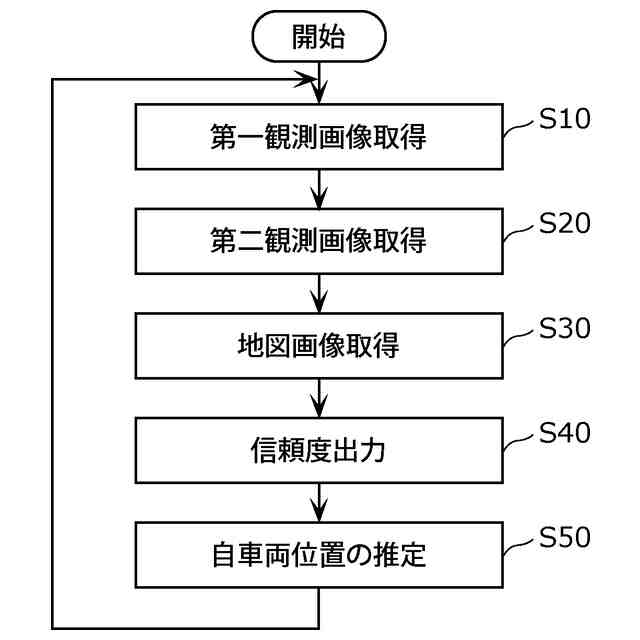
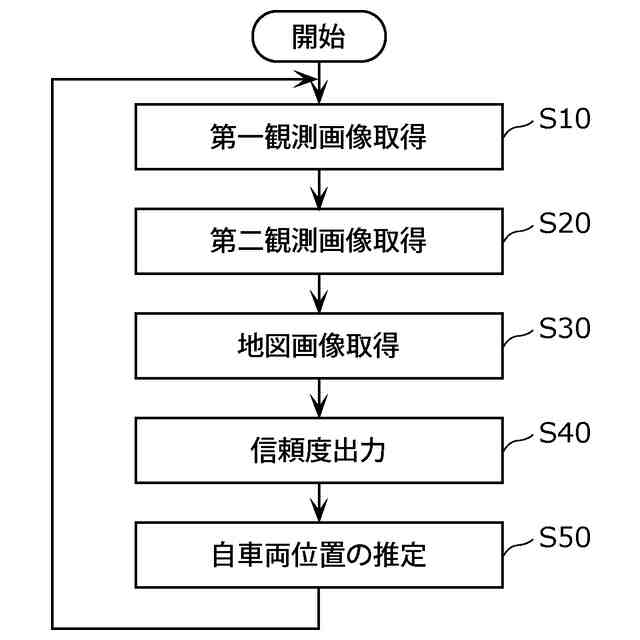
【解決手段】車両位置推定方法は、自車両の位置を推定する車両位置推定方法であって、自車両が走行する道路の画像を含む第一観測画像を取得する第一観測画像取得ステップS10と、第一観測画像に対応する地図画像を取得する地図画像取得ステップS30と、第一観測画像及び地図画像に基づいて、第一観測画像における道路の路面標示が認識できる尤度を示す信頼度を出力する信頼度出力ステップS40と、第一観測画像、地図画像、及び信頼度を用いて自車両の位置を推定する推定ステップS50とを含み、信頼度出力ステップS40において、第一観測画像及び地図画像が入力され、信頼度を推定する、学習済みの機械学習モデルを用いて信頼度を出力する。
【選択図】図7
特許請求の範囲
【請求項1】
自車両の位置を推定する車両位置推定方法であって、
前記自車両が走行する道路の画像を含む第一観測画像を取得する第一観測画像取得ステップと、
前記第一観測画像に対応する地図画像を取得する地図画像取得ステップと、
前記第一観測画像及び前記地図画像に基づいて、前記第一観測画像における前記道路の路面標示が認識できる尤度を示す信頼度を出力する信頼度出力ステップと、
前記第一観測画像、前記地図画像、及び前記信頼度を用いて前記自車両の位置を推定する推定ステップとを含み、
前記信頼度出力ステップにおいて、前記第一観測画像及び前記地図画像が入力され、前記信頼度を推定する、学習済みの機械学習モデルを用いて前記信頼度を出力する
車両位置推定方法。
続きを表示(約 1,400 文字)
【請求項2】
前記信頼度は、3段階以上のレベルで表される
請求項1に記載の車両位置推定方法。
【請求項3】
前記自車両が走行する前記道路の画像を含む第二観測画像を取得する第二観測画像取得ステップを含み、
前記第一観測画像取得ステップにおいて、LiDAR(Light Detection and Ranging)によって前記第一観測画像を取得し、
前記第二観測画像取得ステップにおいて、ミリ波レーダによって前記第二観測画像を取得し、
前記推定ステップにおいて、前記第一観測画像、前記第二観測画像、及び前記信頼度を用いて前記自車両の位置を推定する
請求項1又は2に記載の車両位置推定方法。
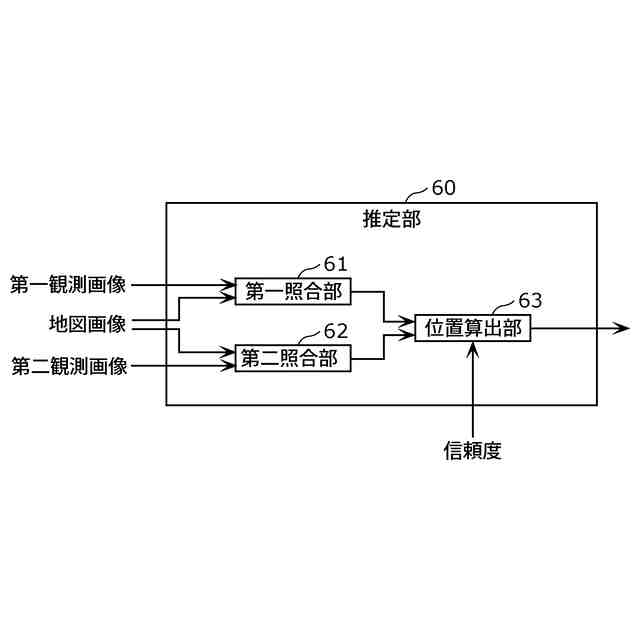
【請求項4】
前記推定ステップにおいて、
前記第一観測画像に基づく前記自車両の推定位置である第一推定位置、及び、前記第二観測画像に基づく前記自車両の推定位置である第二推定位置に、前記信頼度に基づく重み付けを行うことで、前記自車両の位置を推定する
請求項3に記載の車両位置推定方法。
【請求項5】
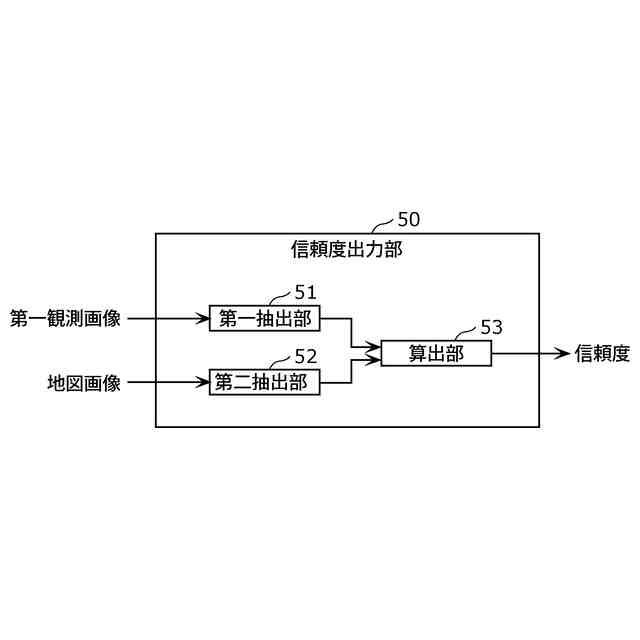
前記機械学習モデルは、
前記第一観測画像の特徴点である第一特徴点を抽出する第一抽出部と、
前記地図画像の特徴点である第二特徴点を抽出する第二抽出部とを有する
請求項1又は2に記載の車両位置推定方法。
【請求項6】
前記機械学習モデルは、
前記第一特徴点と前記第二特徴点との一致度に基づいて前記信頼度を算出する算出部を有する
請求項5に記載の車両位置推定方法。
【請求項7】
請求項1又は2に記載の車両位置推定方法をコンピュータに実行させるための
プログラム。
【請求項8】
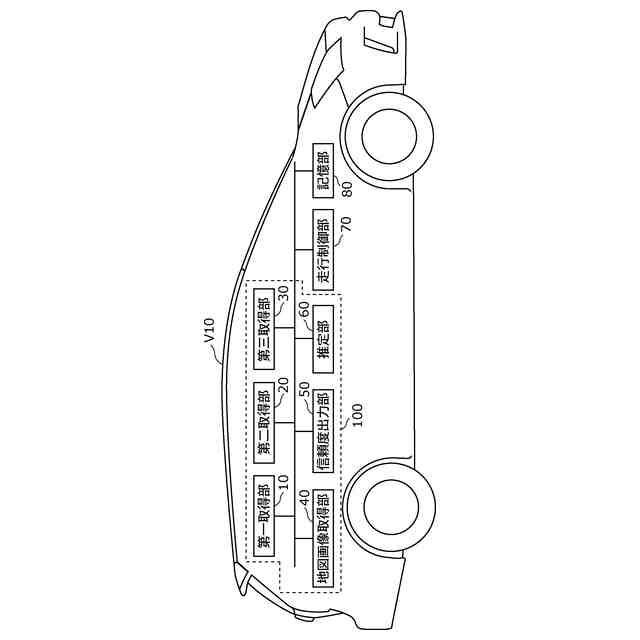
自車両の位置を推定する車両位置推定装置であって、
前記自車両が走行する道路の画像を含む第一観測画像を取得する第一取得部と、
前記第一観測画像に対応する地図画像を取得する地図画像取得部と、
前記第一観測画像及び前記地図画像に基づいて、前記第一観測画像における前記道路の路面標示が認識できる尤度を示す信頼度を出力する信頼度出力部と、
前記第一観測画像、前記地図画像及び前記信頼度を用いて前記自車両の位置を推定する推定部とを含み、
前記信頼度出力部は、前記第一観測画像及び前記地図画像が入力され、前記信頼度を推定する、学習済みの機械学習モデルを用いて前記信頼度を出力する
車両位置推定装置。
【請求項9】
請求項8に記載の車両位置推定装置と、
前記自車両の走行を制御する走行制御部とを備える
自律移動体。
【請求項10】
機械学習モデルの学習方法であって、
前記機械学習モデルは、自車両が走行する道路の画像を含む第一観測画像、及び、前記第一観測画像に対応する地図画像が入力され、前記第一観測画像における前記道路の路面標示が認識できる尤度を示す信頼度を推定し、
前記機械学習モデルの学習方法は、
前記第一観測画像、前記地図画像、及び、前記信頼度の教師データを準備する準備ステップと、
前記教師データを用いて前記機械学習モデルに学習させる学習ステップとを含む
機械学習モデルの学習方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両位置推定方法、プログラム、車両位置推定装置、自律移動体、及び機械学習モデルの学習方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
現在、自動車等の移動体の自動運転に関する研究が活発に進められている(特許文献1等参照)。移動体の自動運転において、移動体の位置を推定する必要がある。例えば、特許文献1には、撮像装置によって取得された観測画像に基づいて自車両の位置を推定する技術が記載されている。特許文献1に記載された技術においては、観測画像に含まれる区画線と、当該観測画像に対応する地図画像に含まれる区画線とを検出し、それらの区画線の一致度に基づいて、推定した位置の信頼性を評価している。これにより、特許文献1に記載された技術では、信頼性の低い観測画像に基づく位置推定を回避しようとしている。
【先行技術文献】
【特許文献】
【0003】
特開2020-26985号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載された発明においては、取得された観測画像及び地図画像から区画線を検出する必要がある。また、区画線の検出において、例えば、路面に線状に残った積雪などを区画線として誤検出するおそれがある。
【0005】
そこで、本発明は、観測画像において区画線などの路面標示を認識できる尤度を示す信頼度を容易かつ精度良く出力することができる車両位置推定方法などを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一態様に係る車両位置推定方法は、自車両の位置を推定する車両位置推定方法であって、前記自車両が走行する道路の画像を含む第一観測画像を取得する第一観測画像取得ステップと、前記第一観測画像に対応する地図画像を取得する地図画像取得ステップと、前記第一観測画像及び前記地図画像に基づいて、前記第一観測画像における前記道路の路面標示が認識できる尤度を示す信頼度を出力する信頼度出力ステップと、前記第一観測画像、前記地図画像、及び前記信頼度を用いて前記自車両の位置を推定する推定ステップとを含み、前記信頼度出力ステップにおいて、前記第一観測画像及び前記地図画像が入力され、前記信頼度を推定する、学習済みの機械学習モデルを用いて前記信頼度を出力する。
【0007】
また、上記目的を達成するために、本発明の一態様に係るプログラムは、上記車両位置推定方法をコンピュータに実行させるためのプログラムである。
【0008】
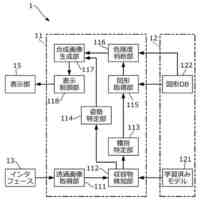
また、上記目的を達成するために、本発明の一態様に係る車両位置推定装置は、自車両の位置を推定する車両位置推定装置であって、前記自車両が走行する道路の画像を含む第一観測画像を取得する第一取得部と、前記第一観測画像に対応する地図画像を取得する地図画像取得部と、前記第一観測画像及び前記地図画像に基づいて、前記第一観測画像における前記道路の路面標示が認識できる尤度を示す信頼度を出力する信頼度出力部と、前記第一観測画像、前記地図画像及び前記信頼度を用いて前記自車両の位置を推定する推定部とを含み、前記信頼度出力部は、前記第一観測画像及び前記地図画像が入力され、前記信頼度を推定する、学習済みの機械学習モデルを用いて前記信頼度を出力する。
【0009】
また、上記目的を達成するために、本発明の一態様に係る自律移動体は、上記車両位置推定装置と、前記自車両の走行を制御する走行制御部とを備える。
【0010】
また、上記目的を達成するために、本発明の一態様に係る機械学習モデルの学習方法は、機械学習モデルの学習方法であって、前記機械学習モデルは、自車両が走行する道路の画像を含む第一観測画像、及び、前記第一観測画像に対応する地図画像が入力され、前記第一観測画像における前記道路の路面標示が認識できる尤度を示す信頼度を推定し、前記機械学習モデルの学習方法は、前記第一観測画像、前記地図画像、及び、前記信頼度の教師データを準備する準備ステップと、前記教師データを用いて前記機械学習モデルに学習させる学習ステップとを含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
国立大学法人金沢大学
太陽電池とその製造方法
26日前
個人
通電検査装置
6日前
日本精機株式会社
位置検出装置
2日前
株式会社ハシマ
検針機
5日前
東レ株式会社
シート状物の検査方法
今日
東ソー株式会社
自動分析装置及び方法
2日前
富士電機株式会社
エンコーダ
今日
DIC株式会社
測定装置
7日前
富士電機株式会社
放射線検出器
7日前
株式会社ヨコオ
シートコンタクタ
2日前
TDK株式会社
温度センサ
今日
スタンレー電気株式会社
車両前方視認装置
5日前
スタンレー電気株式会社
車両前方視認装置
5日前
矢崎総業株式会社
電流センサ
6日前
ダイハツ工業株式会社
凹部の深さ測定方法
5日前
本田技研工業株式会社
物体検出装置
5日前
本田技研工業株式会社
物体検出装置
5日前
セイコーエプソン株式会社
干渉計
2日前
JRCモビリティ株式会社
充電用温度判定回路
2日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
7日前
株式会社JVCケンウッド
撮像装置及び測距方法
5日前
日本信号株式会社
表示装置
今日
内山工業株式会社
分析装置用部材
1日前
TDK株式会社
センサ
今日
浜松ホトニクス株式会社
分光計測装置
6日前
日東建設株式会社
ボルト・ナットの健全性検査装置
5日前
セイコーエプソン株式会社
電子デバイス
6日前
株式会社SUBARU
蓄電池の状態センサ装置
2日前
倉敷化工株式会社
動特性測定装置
5日前
住友電気工業株式会社
光モジュール
5日前
国立大学法人 東京大学
粘性の測定装置及び方法
1日前
株式会社キーエンス
レベル計
5日前
株式会社キーエンス
レベル計
5日前
大成建設株式会社
地震動解析システム
今日
株式会社キーエンス
レベル計
5日前
株式会社キーエンス
レベル計
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ