TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024153479
公報種別
公開特許公報(A)
公開日
2024-10-29
出願番号
2023067400
出願日
2023-04-17
発明の名称
プロセス制御システムおよび方法
出願人
株式会社日立製作所
代理人
弁理士法人ウィルフォート国際特許事務所
主分類
G05B
17/02 20060101AFI20241022BHJP(制御;調整)
要約
【課題】対象のプロセスに適した運転条件を効率的に得ることができるプロセス制御システムを提供すること。
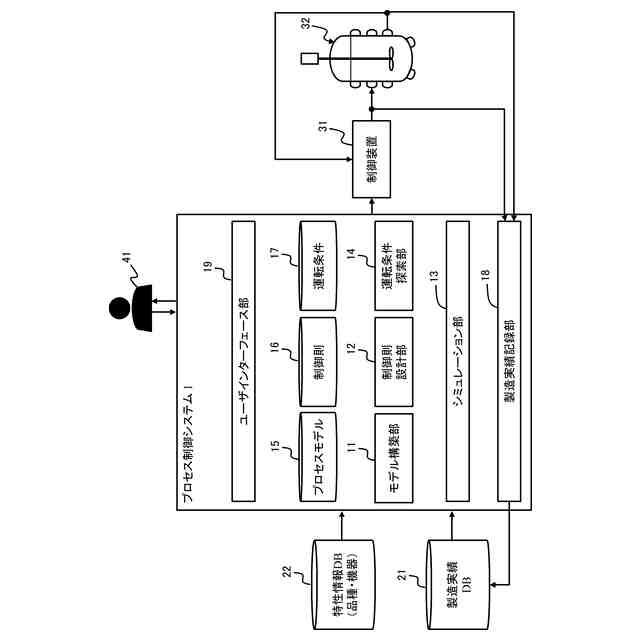
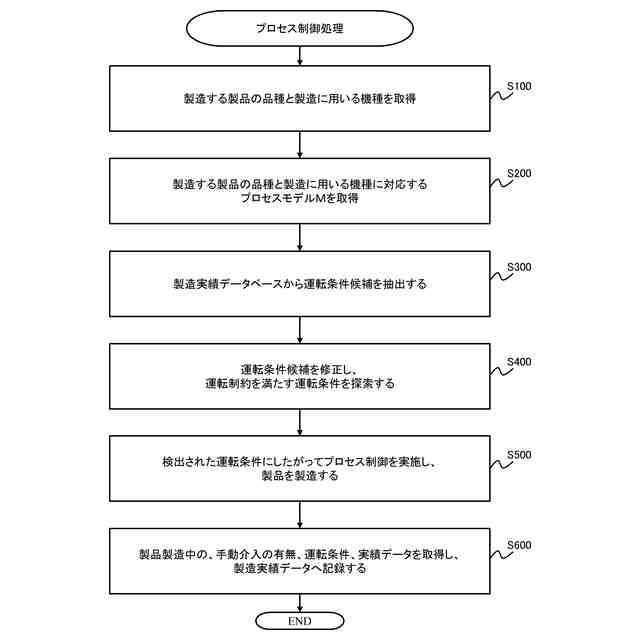
【解決手段】コンピュータによって対象のプロセスを制御するプロセス制御システム1は、プロセスへの操作量から制御量を予測するプロセスモデルを記憶するプロセスモデル記憶部15と、プロセスの製造実績データを記憶する製造実績データ記憶部21と、プロセスモデル記憶部から取得されたプロセスモデルを用いて、対象のプロセスのシミュレーションを行うプロセスシミュレーション部13と、対象のプロセスと所定範囲内で類似する他のプロセスにおける製造実績データを製造実績データ記憶部から抽出し、抽出された製造実績データに基づいて、対象のプロセスが持つ運転制約を満たす運転条件を探索する運転条件探索部14とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータによって対象のプロセスを制御するプロセス制御システムであって、
プロセスへの操作量から制御量を予測するプロセスモデルを記憶するプロセスモデル記憶部と、
プロセスの製造実績データを記憶する製造実績データ記憶部と、
前記プロセスモデル記憶部から取得された前記プロセスモデルを用いて、対象のプロセスのシミュレーションを行うプロセスシミュレーション部と、
前記対象のプロセスと所定範囲内で類似する他のプロセスにおける製造実績データを前記製造実績データ記憶部から抽出し、前記抽出された製造実績データに基づいて、前記対象のプロセスが持つ運転制約を満たす運転条件を探索する運転条件探索部と、
を備えるプロセス制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記プロセスモデル記憶部は、製造対象の品種と製造に使用する機器の種類とに応じてあらかじめ計算されたプロセスモデルを記憶する
請求項1に記載のプロセス制御システム。
【請求項3】
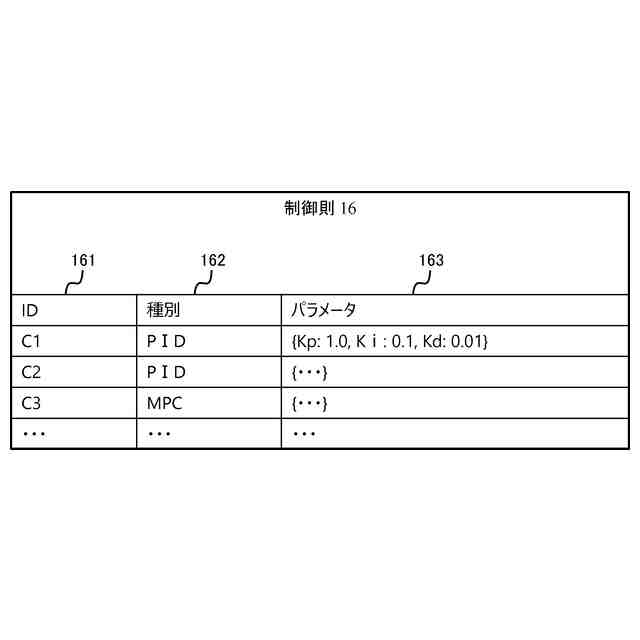
さらに、プロセスの制御則を記憶する制御則記憶部を備えており、
前記プロセスシミュレーション部は、前記プロセスモデル記憶部から取得されたプロセスモデルと前記制御則記憶部から取得された制御則とを用いた閉ループシミュレーションを実行し、
前記運転条件探索部は、前記閉ループシミュレーションの結果に基づいて、前記運転条件を探索する
請求項2に記載のプロセス制御システム。
【請求項4】
前記運転条件探索部は、さらに、プラントに設定された所定の評価指標に基づいて、前記運転条件を探索する
請求項3に記載のプロセス制御システム。
【請求項5】
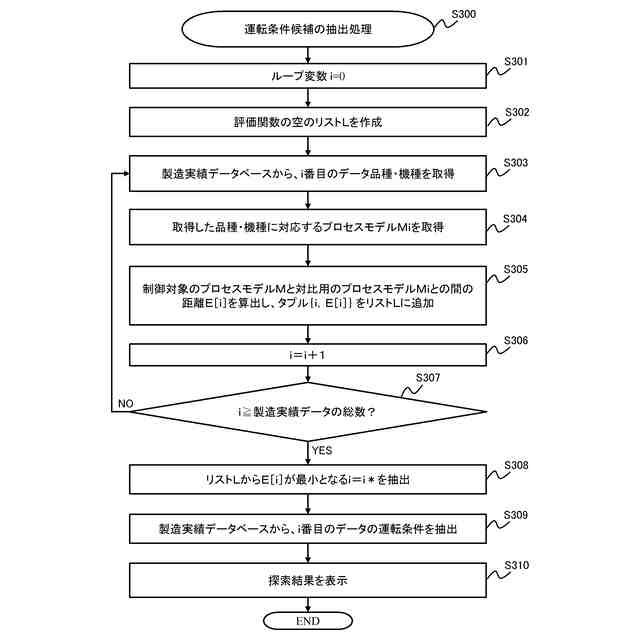
前記運転条件探索部は、前記プロセスモデルを用いて対象のプロセスの状態の時間変化を算出し、前記算出された状態の時間変化と所定範囲内で類似する状態の時間変化を持つ他のプロセスの製造実績データを抽出する
請求項1に記載のプロセス制御システム。
【請求項6】
前記運転条件探索部は、前記状態の時間変化として、実測データを用いずに、プロセス内部の状態の時間変化を算出する
請求項5に記載のプロセス制御システム。
【請求項7】
前記プロセスモデル記憶部は、製造対象の品種と製造に使用する機器の種類とに応じてあらかじめ計算されたプロセスモデルを記憶し、
前記製造実績データ記憶部は、前記製造対象の品種と前記製造に使用する機器の種類とに応じて記憶し、
前記運転条件探索部は、対象のプロセスモデルと動特性が所定範囲内で近い他のプロセスモデルに関する品種および機種を特定し、特定された品種および機種に対応する製造実績データを前記製造実績データ記憶部から抽出する
請求項1に記載のプロセス制御システム。
【請求項8】
前記運転条件探索部は、前記対象のプロセスが持つ運転制約を満たす運転条件の候補を区分線形関数で近似し、前記区分線形関数のパラメータを用いて、運転条件を探索する際に用いる制約条件および目的関数を定義する
請求項1に記載のプロセス制御システム。
【請求項9】
前記運転制約は、前記対象のプロセスについて実測された状態と、前記対象のプロセスモデルを用いて算出される内部状態とに基づいて設定される
請求項1に記載のプロセス制御システム。
【請求項10】
前記プロセスは、バッチプロセスである
請求項1-9のいずれか一項に記載のプロセス制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、プロセス制御システムおよび方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
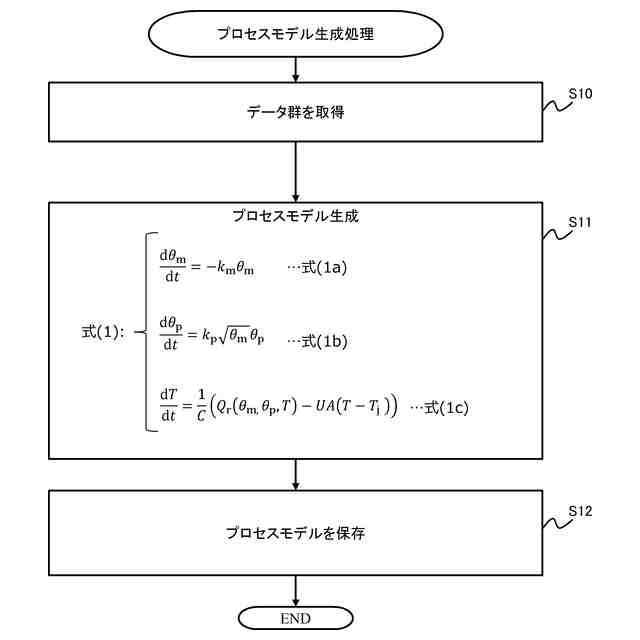
石油化学プラントなどのプロセス運転の現場では、試運転の実績や過去の運転実績などから、所望の品質および収率を実現するのに最適なプロセスの運転条件(温度の時間プロファイルなど)を求めておき、運転時には、その運転条件を再現するために、バルブ等の制御機器を操作する。通常、このような制御は、プロセスの物質収支およびエネルギー収支を表すプロセスモデルを用いて、プロセスの状態(温度、物質濃度など)を推定したり予測したりし、その結果に基づき操作量を決定するという枠組み(モデルベースト制御)で行われる。
【0003】
プロセスの物質収支やエネルギー収支は、プロセスの運転毎に異なり得る。この原因として、例えば、製造品種の違いによる反応熱の差異、バルブ等の制御機器の特性の違いや経年劣化、入力されない外部環境状態などの、様々な外乱が運転毎に異なることにより、同じ運転条件を達成するための運転方法が、毎回異なるためである。
【0004】
こうした違いは、製造単位(バッチ)毎に異なる機器で異なる品種を製造し得るバッチプロセスにおいてよく生じる。このため、バッチプロセスの制御では、機器の種類や品種に応じてプロセスモデルのパラメータを変更し、制御に用いている。
【0005】
しかしながら、バッチプロセスの制御では、機種や品種によってはそもそもプロセスの運転条件が定まっておらず、モデルベースト制御の枠組みを適用できない場合がある。例えば、制御対象とするバッチと同じ品種と機種の組合せで、試運転ないし製造した実績がない場合、どのような運転条件を設定すれば品質や収率が良くなるかは不明である。さらに、設定した運転条件がプラントの運転制約を遵守できるかも不明である。さらに、試運転の実績や製造実績がある場合でも、プラントの運転制約を逸脱したときにはユーザが手動で介入する必要がある。ユーザが手動介入した実績データしか無い場合、その実績データのある運転条件をそのまま用いて運転制約を遵守できるかは不明である。すなわち、実績のないバッチプロセスの場合、機種または品種の違いによる、物質収支の差異とエネルギー収支の差異を考慮しつつ、少なくともプラントの運転制約を遵守可能な運転条件を探索することが求められる。
【0006】
運転条件を探索する従来技術として、例えば特許文献1がある。特許文献1では、運転条件探索のために、シミュレーションの精度がよく、且つ最適化計算の時間を短縮することのできる最適化装置を提供する。特許文献1では、制御対象に関して与えられるデータに基づき探索空間内の実行可能領域を推定し、推定された実行可能領域に対応する多項式モデルを作成し、その多項式モデルを用いて、与えられる目的関数の最適化を行い、多項式モデルにおける第1最適解を求める。この第1最適解に基づき、制御対象の厳密なプロセスモデルを用いて、与えられる目的関数を最適化することで第2最適解を求める。
【先行技術文献】
【特許文献】
【0007】
特開2019-220028号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1では、実行可能領域を推定するための多項式モデルを実績データから構築している。しかし、前述の通り、多種類の製品を製造するバッチプロセスでは、そもそも制御対象バッチと同じ品種および同じ機種であって、かつユーザの手動介入なく製造を行った実績がない場合がある。
【0009】
信頼できる実績データが無い場合、制御対象と同じ特性を有するプロセスの実績データを用いて多項式モデルを構築することは不可能である。別のプロセスの実績データを用いて、特許文献1の技術を適用したとしても、推定された実行可能領域が実際の制御対象の特性を反映していない。したがって、最適化によって求められた運転条件の下で制御対象を運転しても、運転制約を遵守できる保証はない。
【0010】
事前に試運転を行い、実行可能領域を推定するためのデータを収集する方法も考えられるが、一般にプラントの試運転は、運転制約に抵触しないよう試行錯誤しながら行うため、試運転には数週間から数ヶ月の時間を要する。すなわち、新たな運転条件を探索するために毎回試運転を行うのは、リードタイムの観点から現実的ではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
3日前
ugo株式会社
移動体
3日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社豊田自動織機
自動走行体
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
自律移動体
2日前
トヨタ自動車株式会社
搬送ロボット
16日前
オムロン株式会社
自律作業システム
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送システム
26日前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
トヨタ自動車株式会社
位置推定システム
2日前
トヨタ自動車株式会社
ロボットシステム
26日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
自律移動システム
2日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社FUJI
工作機械の操作システム
9日前
株式会社栗本鐵工所
操作装置
17日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社デンソー
電子制御装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社フカデン
外周部加工システム
2か月前
東芝ライテック株式会社
管理システム
1か月前
株式会社ダイフク
物品搬送設備
26日前
株式会社栗本鐵工所
触覚提示装置
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
16日前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
日立建機株式会社
自律走行システム
2か月前
株式会社デンソー
移動体制御装置
2か月前
アズビル株式会社
診断システムおよび診断方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































